1、野火freertos学习笔记
野火freertos学习笔记
- 1、任务
-
- 1.1 栈
- 1.2 任务的切换 taskYIELD();
- 1.3 临界段
- 2、空闲任务
- 3、任务优先级
- 4、任务延时的表现
- 5、时间片
-
- 5.1抢占式、协做式
- 6、创建任务
- 7、启动任务
- 8、任务管理
-
- 8.1 任务状态
- 8.2 任务挂起、恢复、删除API
- 8.3 vTaskDelay()
- 8.4 vTaskDelayUntil()
- 8.5 任务设计规则
- 9、队列与消息
-
- 9.1概念
- 9.2 API
- 9.3 举例
- 10、信号量
-
- 10.1信号量、互斥信号量、计数信号量运用场景与概念
- 10.2二值信号量、计数信号量
- 10.3 优先级翻转与优先级继承
- 10.4 信号量函数
-
- 10.4.1xSemaphoreCreateBinary()
- 10.4.2 xSemaphoreCreateCounting()
- 10.4.3vSemaphoreDelete()
- 10.4.4 xSemaphoreGive( BinarySem_Handle );
- 10.4.5xSemaphoreGiveFromISR(BinarySem_Handle,&pxHigherPriorityTaskWoken);
- 10.4.6 xSemaphoreTake( xSemaphore, xBlockTime )
- 10.4.7xSemaphoreTakeFromISR(SemaphoreHandle_t xSemaphore,signed BaseType_t *pxHigherPriorityTaskWoken)
- 10.4.8 uxSemaphoreGetCount()
- 10.5 特别注意
- 11、互斥信号量
-
- 11.1 概念
- 11.2 运用场景
- 11.3 API函数
-
- 11.3.1 互斥量创建函数xSemaphoreCreateMutex()
- 11.3.2 xSemaphoreCreateMutexStatic()
- 11.3.3 递归互斥量创建函数xSem'CreateRecursiveMutex()
- 11.3.4xSem'CreateRecursiveMutexStatic()
- 11.3.5xSemaphoreGetMutexHolder()
- 11.3.6 递归互斥量获取函数xSemaphoreTakeRecursive()
- 11.3.7 互斥量删除函数 vSemaphoreDelete()
- 11.3.8 互斥量获取函数 xSemaphoreTake()
- 11.3.9 互斥量释放函数 xSemaphoreGive()
- 11.3.10 递归互斥量释放函数 xSemaphoreGiveRecursive()
- 11.4 互斥信号量举例
- 12、事件
-
- 12.1特点
- 12.2 事件与全局变量的区别
- 12.3 API函数
-
- 12.3.1 xEventGroupCreate( )
- 12.3.2 vEventGroupDelete()
- 12.3.3 xEventGroupSetBits()
- 12.3.4 xEventGroupWaitBits()
- 12.3.5 xEventGroupClearBits()
- 12.3.6 xEventGroupClearBitsFromISR()
- 12.4 举例
- 13、定时器
-
- 13.1基本概念
- 13.2 运用场景
- 13.3 运作机制
- 13.4 创建过程
- 13.5 软件定时器相关函数
-
- 13.5.1xTimerCreate();
- 13.5.2xTimerlsTimerActive();
- 13.5.3xTimerStart();
- 13.5.4xTimerStop();
- 13.5.5xTimerChangePeriod();
- 13.5.6xTimerDelete();
- 13.5.7xTimerReset();
- 13.5.8xTimerStartFromISR();
- 13.5.9xTimerStopFromISR();
- 13.5.10xTimerChangePeriodFromISR();
- 13.5.11xTimerResetFromISR();
- 13.5.12xTimerGetTimerID();
- 13.5.13xTimerGetTimerDaemonTaskHandle();
- 13.6 软件定时器举例
- 14、任务通知
-
- 14.1 任务通知的基本概念
- 14.2 任务通知函数
-
- 14.2.1 xTaskNotify()
- 14.2.3 xTaskNotifyFromISR()
- 14.2.4 xTaskNotifyGive()
- 14.2.5 vTaskNotifyGiveFromISR()
- 14.2.6 xTaskNotifyAndQuery()
- 14.2.7 xTaskNotifyAndQueryFromISR()
- 14.2.8 ulTaskNotifyTake()
- 14.2.9xTaskNotifyWait()
- 14.3举例
-
- 14.3.1 任务通知代替消息队列
- 14.3.2 任务通知代二值信号量
- 14.3.3 任务通知代替计数信号量
- 14.3.4 任务通知代替事件组
- 15、内存管理
-
- 15.1 Heap_1.c 方案具有以下特点:
- 15.2 heap_2.c 方案具有以下特点:
- 15.3 heap_3.c 方案具有以下特点:
- 15.4 heap_4.c 方案具有以下特点:
- 16 中断管理
-
- 16.1 中断处理
- 16.2 中断讲解
- 17CUP统计率
-
- 17.1概念
- 17.2举例
1、任务
1.1 栈
在多任务系统中,每个任务都是独立的,互不干扰的,所以要为每个任务都分
配独立的栈空间,这个栈空间通常是一个预先定义好的全局数组,也可以是动态分配的一段内存空间,但它们都存在于 RAM 中。
1.2 任务的切换 taskYIELD();
/*
*************************************************************************
* 包含的头文件
*************************************************************************
*/
#include "FreeRTOS.h"
#include "task.h"
//#include "ARMCM3.h"
/*
*************************************************************************
* 全局变量
*************************************************************************
*/
portCHAR flag1;
portCHAR flag2;
extern List_t pxReadyTasksLists[ configMAX_PRIORITIES ];
/*
*************************************************************************
* 任务控制块 & STACK
*************************************************************************
*/
TaskHandle_t Task1_Handle;
#define TASK1_STACK_SIZE 128
StackType_t Task1Stack[TASK1_STACK_SIZE];
TCB_t Task1TCB;
TaskHandle_t Task2_Handle;
#define TASK2_STACK_SIZE 128
StackType_t Task2Stack[TASK2_STACK_SIZE];
TCB_t Task2TCB;
/*
*************************************************************************
* 函数声明
*************************************************************************
*/
void delay (uint32_t count);
void Task1_Entry( void *p_arg );
void Task2_Entry( void *p_arg );
/*
************************************************************************
* main函数
************************************************************************
*/
/*
* 注意事项:1、该工程使用软件仿真,debug需选择 Ude Simulator
* 2、在Target选项卡里面把晶振Xtal(Mhz)的值改为25,默认是12,
* 改成25是为了跟system_ARMCM3.c中定义的__SYSTEM_CLOCK相同,确保仿真的时候时钟一致
*/
int main(void)
{
/* 硬件初始化 */
/* 将硬件相关的初始化放在这里,如果是软件仿真则没有相关初始化代码 */
/* 初始化与任务相关的列表,如就绪列表 */
prvInitialiseTaskLists();
/* 创建任务 */
Task1_Handle = xTaskCreateStatic( (TaskFunction_t)Task1_Entry, /* 任务入口 */
(char *)"Task1", /* 任务名称,字符串形式 */
(uint32_t)TASK1_STACK_SIZE , /* 任务栈大小,单位为字 */
(void *) NULL, /* 任务形参 */
(StackType_t *)Task1Stack, /* 任务栈起始地址 */
(TCB_t *)&Task1TCB ); /* 任务控制块 */
/* 将任务添加到就绪列表 */
vListInsertEnd( &( pxReadyTasksLists[1] ), &( ((TCB_t *)(&Task1TCB))->xStateListItem ) );
Task2_Handle = xTaskCreateStatic( (TaskFunction_t)Task2_Entry, /* 任务入口 */
(char *)"Task2", /* 任务名称,字符串形式 */
(uint32_t)TASK2_STACK_SIZE , /* 任务栈大小,单位为字 */
(void *) NULL, /* 任务形参 */
(StackType_t *)Task2Stack, /* 任务栈起始地址 */
(TCB_t *)&Task2TCB ); /* 任务控制块 */
/* 将任务添加到就绪列表 */
vListInsertEnd( &( pxReadyTasksLists[2] ), &( ((TCB_t *)(&Task2TCB))->xStateListItem ) );
/* 启动调度器,开始多任务调度,启动成功则不返回 */
vTaskStartScheduler();
for(;;)
{
/* 系统启动成功不会到达这里 */
}
}
/*
*************************************************************************
* 函数实现
*************************************************************************
*/
/* 软件延时 */
void delay (uint32_t count)
{
for(; count!=0; count--);
}
/* 任务1 */
void Task1_Entry( void *p_arg )
{
for( ;; )
{
flag1 = 1;
delay( 100 );
flag1 = 0;
delay( 100 );
/* 线程切换,这里是手动切换 */
portYIELD();
}
}
/* 任务2 */
void Task2_Entry( void *p_arg )
{
for( ;; )
{
flag2 = 1;
delay( 100 );
flag2 = 0;
delay( 100 );
/* 线程切换,这里是手动切换 */
portYIELD();
}
}
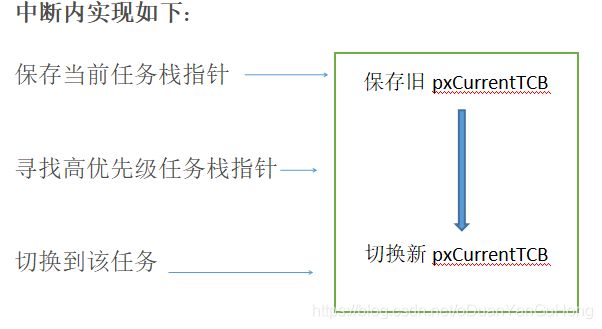
任务切换的实现过程
触发,PendSVC中断,进入PendSVC Handler中断(优先级最低)函数进行处理,PendSVC Handler里寻找到最高优先级,并执行
__asm void xPortPendSVHandler( void )
{
extern pxCurrentTCB;
extern vTaskSwitchContext;
PRESERVE8
mrs r0, psp
isb
ldr r3, =pxCurrentTCB
ldr r2, [r3]
stmdb r0!, {r4-r11}
str r0, [r2]
stmdb sp!, {r3, r14}
mov r0, #configMAX_SYSCALL_INTERRUPT_PRIORITY
msr basepri, r0
dsb
isb
bl vTaskSwitchContext
mov r0, #0
msr basepri, r0
ldmia sp!, {r3, r14}
ldr r1, [r3]
ldr r0, [r1]
ldmia r0!, {r4-r11}
msr psp, r0
isb
bx r14
nop
}
1.3 临界段
目的:指处理时不可分割的代码区域,一旦这部分代码开始执行,则不允许任何中断打断,保证当前只有一个线程在使用临界资源。为确保临界段代码的执行不被中断,在进入临界段之前须关中断(包括系统中断以及外部中断),而临界段代码执行完毕后,要立即打开中断。
原理:BASEPRI
设置为n后,屏蔽所有优先级数值大于等于n的中断和异常。Cortex-M的优先级数值越大其优先级越低。与FreeRTOS相反。
BASEPRE 优先级大于设置值会屏蔽,设置为0,不关闭任何中断。(即打开中断)。
比如设置为:11,则优先级大于11都会屏蔽。
执行过程:
vPortEnterCritical();进入代码如下:关闭中断
static portFORCE_INLINE void vPortRaiseBASEPRI( void )
{
uint32_t ulNewBASEPRI = configMAX_SYSCALL_INTERRUPT_PRIORITY;
/* 高四位有效即0xb0或者11 */
__asm
{
/* Set BASEPRI to the max syscall priority to effect a critical
section. */
msr basepri, ulNewBASEPRI
dsb
isb
}
}
vPortExitCritical();退出
详细:
static portFORCE_INLINE void vPortSetBASEPRI( uint32_t ulBASEPRI )
{
__asm
{
/* Barrier instructions are not used as this function is only used to
lower the BASEPRI value. */
msr basepri, ulBASEPRI
}
}
#define taskENTER_CRITICAL() portENTER_CRITICAL()
#define taskENTER_CRITICAL_FROM_ISR() portSET_INTERRUPT_MASK_FROM_ISR()
#define taskEXIT_CRITICAL() portEXIT_CRITICAL()
#define taskEXIT_CRITICAL_FROM_ISR( x ) portCLEAR_INTERRUPT_MASK_FROM_ISR( x )
运用:
1 非中断场合,临界段不能嵌套。
/*进入临界段*/
taskENTER_CRITICAL()
/*临界段代码*/
/*退出临界段*/
taskEXIT_CRITICAL()
2 在中断场合,临界段可以嵌套
/*进入临界段*/
Return=taskENTER_CRITICAL_FROM_ISR()
/*临界段代码*/
/*退出临界段*/
taskEXIT_CRITICAL_FROM_ISR( Return )
2、空闲任务
RTOS中的延时叫做阻塞延时,任务需要延时的时候,放弃CUP的使用权,CUP去干其他事(如果没有其他任务,进入空闲任务,启动调度器时就已经启动了空闲任务),当任务延时到达后,重新获取CUP使用权。任务继续执行。
void vTaskDelay( const TickType_t xTicksToDelay )
{
TCB_t *pxTCB = NULL;
/*获取当前任务的TCP */
pxTCB = pxCurrentTCB;
/*设置延时时间*/
pxTCB->xTicksToDelay = xTicksToDelay;
/*任务切换 */
taskYIELD();
}
3、任务优先级
任务在创建的时候,会根据任务的优先级将任务插入到就绪列表不同的位置。相同优先级的任务插入到就绪列表里面的同一条链表中。
pxCurrenTCB 是一个全局的 TCB 指针,用于指向优先级最高的就绪任务的 TCB,即当前正在运行的 TCB。那么我们要想让任务支持优先级,即只要解决在任务切换(taskYIELD)的时候,让 pxCurrenTCB 指向最高优先级的就绪任务的 TCB 就可以
查找最高优先级的就绪任务有两种方法,具体由configUSE_PORT_OPTIMISED_TASK_SELECTION这个宏控制,定义为0选择通用方法,定义为1选择根据处理器优化的方法,该宏默认在portmacro.h中定义为1,即使用优化过的方法。
通用方法:
/* 查找最高优先级的就绪任务:通用方法 */
2 #if ( configUSE_PORT_OPTIMISED_TASK_SELECTION == 0 ) (1)
3 /* uxTopReadyPriority 存的是就绪任务的最高优先级 */
4 #define taskRECORD_READY_PRIORITY( uxPriority )\ (2)
5 {
\
6 if( ( uxPriority ) > uxTopReadyPriority )\
7 {
\
8 uxTopReadyPriority = ( uxPriority );\
9 }\
10 } /* taskRECORD_READY_PRIORITY */
11
12 /*-----------------------------------------------------------*/
13
14 #define taskSELECT_HIGHEST_PRIORITY_TASK()\ (3)
15 {
\
16 UBaseType_t uxTopPriority = uxTopReadyPriority;\ (3)-①
17 /* 寻找包含就绪任务的最高优先级的队列 */\ (3)-②
18 while( listLIST_IS_EMPTY( &( pxReadyTasksLists[ uxTopPriority ] ) ) )\
19 {
\
20 --uxTopPriority;\
21 }\
22 /* 获取优先级最高的就绪任务的 TCB,然后更新到 pxCurrentTCB */\
23 listGET_OWNER_OF_NEXT_ENTRY(pxCurrentTCB, &(pxReadyTasksLists[ uxTopPriority ]));\ (3)-③
24 /* 更新 uxTopReadyPriority */\
25 uxTopReadyPriority = uxTopPriority;\ (3)-④
26 } /* taskSELECT_HIGHEST_PRIORITY_TASK */
27
28 /*-----------------------------------------------------------*/
29
30 /* 这两个宏定义只有在选择优化方法时才用,这里定义为空 */
31 #define taskRESET_READY_PRIORITY( uxPriority )
32 #define portRESET_READY_PRIORITY( uxPriority, uxTopReadyPriority )
33
34 /* 查找最高优先级的就绪任务:根据处理器架构优化后的方法 */
35 #else /* configUSE_PORT_OPTIMISED_TASK_SELECTION */ (4)
36
37 #define taskRECORD_READY_PRIORITY( uxPriority ) \ (5)
38 portRECORD_READY_PRIORITY( uxPriority, uxTopReadyPriority )
39
40 /*-----------------------------------------------------------*/
41
42 #define taskSELECT_HIGHEST_PRIORITY_TASK()\ (7)
43 {
\
44 UBaseType_t uxTopPriority;\
45 /* 寻找最高优先级 */\
46 portGET_HIGHEST_PRIORITY( uxTopPriority, uxTopReadyPriority );\ (7)-①
47 /* 获取优先级最高的就绪任务的 TCB,然后更新到 pxCurrentTCB */\
48 listGET_OWNER_OF_NEXT_ENTRY( pxCurrentTCB, &( pxReadyTasksLists[ uxTopPriority ] ) );\ (7)-②
49 } /* taskSELECT_HIGHEST_PRIORITY_TASK() */
50
51 /*-----------------------------------------------------------*/
52 #if 0
#define taskRESET_READY_PRIORITY( uxPriority )\ (注意)
54 {
\
55 if(listCURRENT_LIST_LENGTH(&(pxReadyTasksLists[( uxPriority)]))==(UBaseType_t)0)\
56 {
\
57 portRESET_READY_PRIORITY( ( uxPriority ), ( uxTopReadyPriority ) );\
58 }\
59 }
60 #else
61 #define taskRESET_READY_PRIORITY( uxPriority )\ (6)
62 {
\
63 portRESET_READY_PRIORITY((uxPriority ), (uxTopReadyPriority));\
64 }
65 #endif
66
67 #endif /* configUSE_PORT_OPTIMISED_TASK_SELECTION */
优化方法
代码清单 10-1(4):优化的方法,这得益于 Cortex-M 内核有一个计算前导零的指令CLZ,所谓前导零就是计算一个变量(Cortex-M 内核单片机的变量为 32 位)从高位开始第
一次出现 1 的位的前面的零的个数。比如:一个 32 位的变量 uxTopReadyPriority,其位 0、 位 24 和 位 25 均 置 1 ,其余位为 0 , 具体见。 那么使用前导零指令 __CLZ (uxTopReadyPriority)可以很快的计算出 uxTopReadyPriority 的前导零的个数为 6。

如果uxTopReadyPriority的每个位号对应的是任务的优先级,任务就绪时,则将对应的位置1,反之则清零。那么图 10-2就表示优先级0、优先级24和优先级25这三个任务就绪,其中优先级为25的任务优先级最高。利用前导零计算指令可以很快计算出就绪任务中的最高优先级为:( 31UL - ( uint32_t ) __clz( ( uxReadyPriorities ) ) ) = ( 31UL - ( uint32_t ) 6 ) = 25。
4、任务延时的表现
在本章之前,为了实现任务的阻塞延时,在任务控制块中内置了一个延时变量xTicksToDelay。每当任务需要延时的时候,就初始化 xTicksToDelay 需要延时的时间,然后将任务挂起,这里的挂起只是将任务在优先级位图表 uxTopReadyPriority 中对应的位清零,并不会将任务从就绪列表中删除。当每次时基中断(SysTick 中断)来临时,就扫描就绪列表中的每个任务的 xTicksToDelay,如果 xTicksToDelay 大于 0 则递减一次,然后判断xTicksToDelay 是否为 0,如果为 0 则表示延时时间到,将该任务就绪(即将任务在优先级位图表 uxTopReadyPriority 中对应的位置位),然后进行任务切换。**这种延时的缺点是,在每个时基中断中需要对所有任务都扫描一遍,费时,优点是容易理解。**之所以先这样讲解是为了慢慢地过度到 FreeRTOS 任务延时列表的讲解。
任务延时列表的工作原理:
在 FreeRTOS 中,有一个任务延时列表(实际上有两个,为了方便讲解原理,我们假 装合并为一个,其实两个的作用是一样的),当任务需要延时的时候,则先将任务挂起,即先将任务从就绪列表删除,然后插入到任务延时列表,同时更新下一个任务的解锁时刻变量:xNextTaskUnblockTime 的值。xNextTaskUnblockTime 的值等于系统时基计数器的值 xTickCount 加上任务需要延时的值 xTicksToDelay。当系统时基计数器 xTickCount 的值与 xNextTaskUnblockTime 相等时,就表示有任务延时到期了,需要将该任务就绪。与 RT-Thread 和 μC/OS 在解锁延时任务时要扫描定时器列表这种时间不确定性的方法相比,FreeRTOS 这个 xNextTaskUnblockTime全局变量设计的非常巧妙。
void vTaskDelay( const TickType_t xTicksToDelay )
{
TCB_t *pxTCB = NULL;
/* 获取当前任务的TCB */
pxTCB = pxCurrentTCB;
/* 设置延时时间 */
//pxTCB->xTicksToDelay = xTicksToDelay;
/* 将任务插入到延时列表 */
prvAddCurrentTaskToDelayedList( xTicksToDelay );
/* 任务切换 */
taskYIELD();
}
static void prvAddCurrentTaskToDelayedList( TickType_t xTicksToWait )
{
TickType_t xTimeToWake;
/* 获取系统时基计数器xTickCount的值 */
const TickType_t xConstTickCount = xTickCount;
/* 将任务从就绪列表中移除 */
if( uxListRemove( &( pxCurrentTCB->xStateListItem ) ) == ( UBaseType_t ) 0 )
{
/* 将任务在优先级位图中对应的位清除 */
portRESET_READY_PRIORITY( pxCurrentTCB->uxPriority, uxTopReadyPriority );
}
/* 计算延时到期时,系统时基计数器xTickCount的值是多少 */
xTimeToWake = xConstTickCount + xTicksToWait;
/* 将延时到期的值设置为节点的排序值 */
listSET_LIST_ITEM_VALUE( &( pxCurrentTCB->xStateListItem ), xTimeToWake );
/* 溢出 */
if( xTimeToWake < xConstTickCount )
{
vListInsert( pxOverflowDelayedTaskList, &( pxCurrentTCB->xStateListItem ) );
}
else /* 没有溢出 */
{
vListInsert( pxDelayedTaskList, &( pxCurrentTCB->xStateListItem ) );
/* 更新下一个任务解锁时刻变量xNextTaskUnblockTime的值 */
if( xTimeToWake < xNextTaskUnblockTime )
{
xNextTaskUnblockTime = xTimeToWake;
}
}
}
void xTaskIncrementTick( void )
{
TCB_t * pxTCB;
TickType_t xItemValue;
const TickType_t xConstTickCount = xTickCount + 1;
xTickCount = xConstTickCount;
/* 如果xConstTickCount溢出,则切换延时列表 */
if( xConstTickCount == ( TickType_t ) 0U )
{
taskSWITCH_DELAYED_LISTS();
}
/* 最近的延时任务延时到期 */
if( xConstTickCount >= xNextTaskUnblockTime )
{
for( ;; )
{
if( listLIST_IS_EMPTY( pxDelayedTaskList ) != pdFALSE )
{
/* 延时列表为空,设置xNextTaskUnblockTime为可能的最大值 */
xNextTaskUnblockTime = portMAX_DELAY;
break;
}
else /* 延时列表不为空 */
{
pxTCB = ( TCB_t * ) listGET_OWNER_OF_HEAD_ENTRY( pxDelayedTaskList );
xItemValue = listGET_LIST_ITEM_VALUE( &( pxTCB->xStateListItem ) );
/* 直到将延时列表中所有延时到期的任务移除才跳出for循环 */
if( xConstTickCount < xItemValue )
{
xNextTaskUnblockTime = xItemValue;
break;
}
/* 将任务从延时列表移除,消除等待状态 */
( void ) uxListRemove( &( pxTCB->xStateListItem ) );
/* 将解除等待的任务添加到就绪列表 */
prvAddTaskToReadyList( pxTCB );
}
}
}/* xConstTickCount >= xNextTaskUnblockTime */
/* 任务切换 */
portYIELD();
}
5、时间片
当相同优先级的任务享有轮流占用CUP的使用权。享有CUP的时间我们称为时间片。最小单位为1tick。
5.1抢占式、协做式
抢占式调度:
在这种调度方式中,系统总是选择优先级最高的任务进
行调度,并且 一旦高优先级的任务准备就绪之后,它就会马上被调度而不等待低优先级的任务主动放弃 CPU,高优先级的任务抢占了低优先级任务的 CPU 使用权,这就是抢占,在实习操作系统中,这样子的方式往往是最适用的。
协作式调度(时间片):则是由任务主动放弃CPU,然后才进行任务调度。
6、创建任务
静态内存:申请后一直占有。
动态内存:申请后,用完释放内存。
每个 FreeRTOS 任务都需要有自己的栈空间。当任务切出时,它的执行环境会被保存在该任务的栈空间中,这样当任务再次运行时,就能从堆栈中正确的恢复上次的运行环境,任务越多,需要的堆栈空间就越大,而一个系统能运行多少个任务,取决于系统的可用的 SRAM。
野火创建的任务结构如下:
/**
*********************************************************************
* @file main.c
* @author fire
* @version V1.0
* @date 2018-xx-xx
* @brief FreeRTOS V9.0.0 + STM32 任务管理
*********************************************************************
* @attention
*
* 实验平台:野火 STM32 全系列开发板
* 论坛 :http://www.firebbs.cn
* 淘宝 :https://fire-stm32.taobao.com
*
**********************************************************************
*/
/*
*************************************************************************
* 包含的头文件
*************************************************************************
*/
/* FreeRTOS头文件 */
#include "FreeRTOS.h"
#include "task.h"
/* 开发板硬件bsp头文件 */
#include "bsp_led.h"
#include "bsp_debug_usart.h"
#include "bsp_key.h"
/**************************** 任务句柄 ********************************/
/*
* 任务句柄是一个指针,用于指向一个任务,当任务创建好之后,它就具有了一个任务句柄
* 以后我们要想操作这个任务都需要通过这个任务句柄,如果是自身的任务操作自己,那么
* 这个句柄可以为NULL。
*/
static TaskHandle_t AppTaskCreate_Handle = NULL;/* 创建任务句柄 */
static TaskHandle_t LED_Task_Handle = NULL;/* LED任务句柄 */
static TaskHandle_t KEY_Task_Handle = NULL;/* KEY任务句柄 */
/********************************** 内核对象句柄 *********************************/
/*
* 信号量,消息队列,事件标志组,软件定时器这些都属于内核的对象,要想使用这些内核
* 对象,必须先创建,创建成功之后会返回一个相应的句柄。实际上就是一个指针,后续我
* 们就可以通过这个句柄操作这些内核对象。
*
* 内核对象说白了就是一种全局的数据结构,通过这些数据结构我们可以实现任务间的通信,
* 任务间的事件同步等各种功能。至于这些功能的实现我们是通过调用这些内核对象的函数
* 来完成的
*
*/
/******************************* 全局变量声明 ************************************/
/*
* 当我们在写应用程序的时候,可能需要用到一些全局变量。
*/
/*
*************************************************************************
* 函数声明
*************************************************************************
*/
static void AppTaskCreate(void);/* 用于创建任务 */
static void LED_Task(void* pvParameters);/* LED_Task任务实现 */
static void KEY_Task(void* pvParameters);/* KEY_Task任务实现 */
static void BSP_Init(void);/* 用于初始化板载相关资源 */
/*****************************************************************
* @brief 主函数
* @param 无
* @retval 无
* @note 第一步:开发板硬件初始化
第二步:创建APP应用任务
第三步:启动FreeRTOS,开始多任务调度
****************************************************************/
int main(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
/* 开发板硬件初始化 */
BSP_Init();
printf("这是一个[野火]-STM32全系列开发板-FreeRTOS任务管理实验!\n\n");
printf("按下KEY1挂起任务,按下KEY2恢复任务\n");
/* 创建AppTaskCreate任务 */
xReturn = xTaskCreate((TaskFunction_t )AppTaskCreate, /* 任务入口函数 */
(const char* )"AppTaskCreate",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )1, /* 任务的优先级 */
(TaskHandle_t* )&AppTaskCreate_Handle);/* 任务控制块指针 */
/* 启动任务调度 */
if(pdPASS == xReturn)
vTaskStartScheduler(); /* 启动任务,开启调度 */
else
return -1;
while(1); /* 正常不会执行到这里 */
}
/***********************************************************************
* @ 函数名 : AppTaskCreate
* @ 功能说明: 为了方便管理,所有的任务创建函数都放在这个函数里面
* @ 参数 : 无
* @ 返回值 : 无
**********************************************************************/
static void AppTaskCreate(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
taskENTER_CRITICAL(); //进入临界区
/* 创建LED_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )LED_Task, /* 任务入口函数 */
(const char* )"LED_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL, /* 任务入口函数参数 */
(UBaseType_t )2, /* 任务的优先级 */
(TaskHandle_t* )&LED_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建LED_Task任务成功!\r\n");
/* 创建KEY_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )KEY_Task, /* 任务入口函数 */
(const char* )"KEY_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )3, /* 任务的优先级 */
(TaskHandle_t* )&KEY_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建KEY_Task任务成功!\r\n");
vTaskDelete(AppTaskCreate_Handle); //删除AppTaskCreate任务
taskEXIT_CRITICAL(); //退出临界区
}
/**********************************************************************
* @ 函数名 : LED_Task
* @ 功能说明: LED_Task任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void LED_Task(void* parameter)
{
while (1)
{
LED1_ON;
printf("LED_Task Running,LED1_ON\r\n");
vTaskDelay(500); /* 延时500个tick */
LED1_OFF;
printf("LED_Task Running,LED1_OFF\r\n");
vTaskDelay(500); /* 延时500个tick */
}
}
/**********************************************************************
* @ 函数名 : LED_Task
* @ 功能说明: LED_Task任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void KEY_Task(void* parameter)
{
while (1)
{
if( Key_Scan(KEY1_GPIO_PORT,KEY1_PIN) == KEY_ON )
{
/* K1 被按下 */
printf("挂起LED任务!\n");
vTaskSuspend(LED_Task_Handle);/* 挂起LED任务 */
printf("挂起LED任务成功!\n");
}
if( Key_Scan(KEY2_GPIO_PORT,KEY2_PIN) == KEY_ON )
{
/* K2 被按下 */
printf("恢复LED任务!\n");
vTaskResume(LED_Task_Handle);/* 恢复LED任务! */
printf("恢复LED任务成功!\n");
}
vTaskDelay(20);/* 延时20个tick */
}
}
/***********************************************************************
* @ 函数名 : BSP_Init
* @ 功能说明: 板级外设初始化,所有板子上的初始化均可放在这个函数里面
* @ 参数 :
* @ 返回值 : 无
*********************************************************************/
static void BSP_Init(void)
{
/*
* STM32中断优先级分组为4,即4bit都用来表示抢占优先级,范围为:0~15
* 优先级分组只需要分组一次即可,以后如果有其他的任务需要用到中断,
* 都统一用这个优先级分组,千万不要再分组,切忌。
*/
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 );
/* LED 初始化 */
LED_GPIO_Config();
/* 串口初始化 */
Debug_USART_Config();
/* 按键初始化 */
Key_GPIO_Config();
}
/********************************END OF FILE****************************/
7、启动任务
FreeRTOS 中启动任务调度器的函数是 vTaskStartScheduler(),并且启动任务调度器的时候就不会返回,从此任务管理都由FreeRTOS 管理,此时才是真正进入实时操作系统中的第一步,具体见代码:
void vTaskStartScheduler( void )
{
BaseType_t xReturn;
/* Add the idle task at the lowest priority. */
#if( configSUPPORT_STATIC_ALLOCATION == 1 )
{
StaticTask_t *pxIdleTaskTCBBuffer = NULL;
StackType_t *pxIdleTaskStackBuffer = NULL;
uint32_t ulIdleTaskStackSize;
/* The Idle task is created using user provided RAM - obtain the
address of the RAM then create the idle task. */
vApplicationGetIdleTaskMemory( &pxIdleTaskTCBBuffer, &pxIdleTaskStackBuffer, &ulIdleTaskStackSize );
xIdleTaskHandle = xTaskCreateStatic( prvIdleTask,
configIDLE_TASK_NAME,
ulIdleTaskStackSize,
( void * ) NULL, /*lint !e961. The cast is not redundant for all compilers. */
( tskIDLE_PRIORITY | portPRIVILEGE_BIT ),
pxIdleTaskStackBuffer,
pxIdleTaskTCBBuffer ); /*lint !e961 MISRA exception, justified as it is not a redundant explicit cast to all supported compilers. */
if( xIdleTaskHandle != NULL )
{
xReturn = pdPASS;
}
else
{
xReturn = pdFAIL;
}
}
#else
{
/* The Idle task is being created using dynamically allocated RAM. */
xReturn = xTaskCreate( prvIdleTask,
configIDLE_TASK_NAME,
configMINIMAL_STACK_SIZE,
( void * ) NULL,
( tskIDLE_PRIORITY | portPRIVILEGE_BIT ),
&xIdleTaskHandle ); /*lint !e961 MISRA exception, justified as it is not a redundant explicit cast to all supported compilers. */
}
#endif /* configSUPPORT_STATIC_ALLOCATION */
#if ( configUSE_TIMERS == 1 )
{
if( xReturn == pdPASS )
{
xReturn = xTimerCreateTimerTask();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
#endif /* configUSE_TIMERS */
if( xReturn == pdPASS )
{
/* freertos_tasks_c_additions_init() should only be called if the user
definable macro FREERTOS_TASKS_C_ADDITIONS_INIT() is defined, as that is
the only macro called by the function. */
#ifdef FREERTOS_TASKS_C_ADDITIONS_INIT
{
freertos_tasks_c_additions_init();
}
#endif
/* Interrupts are turned off here, to ensure a tick does not occur
before or during the call to xPortStartScheduler(). The stacks of
the created tasks contain a status word with interrupts switched on
so interrupts will automatically get re-enabled when the first task
starts to run. */
portDISABLE_INTERRUPTS();
#if ( configUSE_NEWLIB_REENTRANT == 1 )
{
/* Switch Newlib's _impure_ptr variable to point to the _reent
structure specific to the task that will run first. */
_impure_ptr = &( pxCurrentTCB->xNewLib_reent );
}
#endif /* configUSE_NEWLIB_REENTRANT */
xNextTaskUnblockTime = portMAX_DELAY;
xSchedulerRunning = pdTRUE;
xTickCount = ( TickType_t ) 0U;
/* If configGENERATE_RUN_TIME_STATS is defined then the following
macro must be defined to configure the timer/counter used to generate
the run time counter time base. NOTE: If configGENERATE_RUN_TIME_STATS
is set to 0 and the following line fails to build then ensure you do not
have portCONFIGURE_TIMER_FOR_RUN_TIME_STATS() defined in your
FreeRTOSConfig.h file. */
portCONFIGURE_TIMER_FOR_RUN_TIME_STATS();
/* Setting up the timer tick is hardware specific and thus in the
portable interface. */
if( xPortStartScheduler() != pdFALSE )
{
/* Should not reach here as if the scheduler is running the
function will not return. */
}
else
{
/* Should only reach here if a task calls xTaskEndScheduler(). */
}
}
else
{
/* This line will only be reached if the kernel could not be started,
because there was not enough FreeRTOS heap to create the idle task
or the timer task. */
configASSERT( xReturn != errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY );
}
/* Prevent compiler warnings if INCLUDE_xTaskGetIdleTaskHandle is set to 0,
meaning xIdleTaskHandle is not used anywhere else. */
( void ) xIdleTaskHandle;
}
启动任务里完成了:
创建空闲任务、定时器任务,然后调用xPortStartScheduler函数配置相关硬件 如滴答定时器、FPU、pendsv等 ,最后调用prvStartFirstTask,启动第一个任务。
8、任务管理
8.1 任务状态
任务状态通常分为以下四种:
就绪(Ready):该任务在就绪列表中,就绪的任务已经具备执行的能力,只等待调度器进行调度,新创建的任务会初始化为就绪态。
运行(Running):该状态表明任务正在执行,此时它占用处理器,FreeRTOS 调度器选择运行的永远是处于最高优先级的就绪态任务,当任务被运行的一刻,它的任务状态就变成了运行态。
阻塞(Blocked):如果任务当前正在等待某个时序或外部中断,我们就说这个任 务处于阻塞状态,该任务不在就绪列表中。包含任务被挂起、任务被延时、任务正在等待信号量、读写队列或者等待读写事件等。
挂起态(Suspended):处于挂起态的任务对调度器而言是不可见的,让一个任务进入挂起状态的唯一办法就是调用 vTaskSuspend()函数;而 把 一 个 挂 起 状态 的任 务 恢复的 唯 一 途 径 就 是 调 用 vTaskResume() 或 vTaskResumeFromISR()函 数,我们可以这么理解挂起态与阻塞态的区别,当任务有较长的时间不允许运行的时候,我们可以挂起任务,这样子调度器就不会管这个任务的任何信息,直到我们调用恢复任务的 API 函数;而任务处于阻塞态的时候,系统还需要判断阻塞态的任务是否超时,是否可以解除阻塞。
FreeRTOS 系统中的每一个任务都有多种运行状态,他们之间的转换关系是怎么样的呢?从运行态任务变成阻塞态,或者从阻塞态变成就绪态,这些任务状态是如何进行迁移?下面就让我们一起了解任务状态迁移吧,具体见图 16-1。
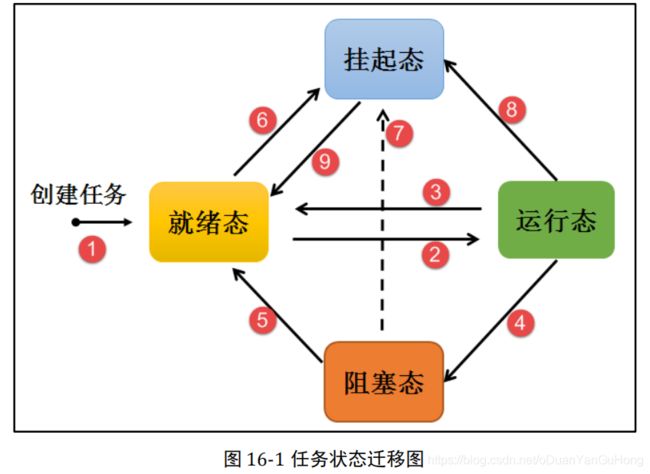
图 16-1(1):创建任务→就绪态(Ready):任务创建完成后进入就绪态,表明任务已准备就绪,随时可以运行,只等待调度器进行调度。
图 16-1(2):就绪态→运行态(Running):发生任务切换时,就绪列表中最高优先级的任务被执行,从而进入运行态。
图 16-1(3):运行态→就绪态:有更高优先级任务创建或者恢复后,会发生任务调度,此刻就绪列表中最高优先级任务变为运行态,那么原先运行的任务由运行态变为就绪态,依然在就绪列表中,等待最高优先级的任务运行完毕继续运行原来的任务(此处可以看做是 CPU 使用权被更高优先级的任务抢占了)。
图 16-1(4):运行态→阻塞态(Blocked):正在运行的任务发生阻塞(挂起、延时、读信号量等待)时,该任务会从就绪列表中删除,任务状态由运行态变成阻塞态,然后发生任务切换,运行就绪列表中当前最高优先级任务。
图 16-1(5):阻塞态→就绪态:阻塞的任务被恢复后(任务恢复、延时时间超时、读信号量超时或读到信号量等),此时被恢复的任务会被加入就绪列表,从而由阻塞态变成就绪态;如果此时被恢复任务的优先级高于正在运行任务的优先级,则会发生任务切换,将该任务将再次转换任务状态,由就绪态变成运行态。
图 16-1(6) (7) (8):就绪态、阻塞态、运行态→挂起态(Suspended):任务可以通过调用 vTaskSuspend() API 函数都可以将处于任何状态的任务挂起,被挂起的任务得不到CPU 的使用权,也不会参与调度,除非它从挂起态中解除。
图 16-1(9):挂起态→就绪态:把 一 个 挂 起 状态 的 任 务 恢复的 唯 一 途 径 就 是 调 用 vTaskResume() 或 vTaskResumeFromISR() API 函数,如果此时被恢复任务的优先级高于正在运行任务的优先级,则会发生任务切换,将该任务将再次转换任务状态,由就绪态
变成运行态。
8.2 任务挂起、恢复、删除API
vTaskSuspend();
vTaskSuspendAll();
vTaskResume();
xTaskResumeAll();
xTaskResumeFromISR();
vTaskDelete();
8.3 vTaskDelay()
用于阻塞延时,调用该函数后,任务将进入阻塞状态,进入阻塞态的任务将让出 CPU 资源。延时的时长由形参 xTicksToDelay 决定,单位为系统节拍周期, 比如系统的时钟节拍周期为 1ms,那么调用 vTaskDelay(1)的延时时间则为 1ms。
vTaskDelay()延时是相对性的延时,它指定的延时时间是从调vTaskDelay()结束后开始计算的,经过指定的时间后延时结束。比如 vTaskDelay(100), 从调用 vTaskDelay()结束后,任务进入阻塞状态,经过 100 个系统时钟节拍周期后,任务解除阻塞。因此,vTaskDelay()并不适用与周期性执行任务的场合。此外,其它任务和中断活动, 也会影响到 vTaskDelay()的调用(比如调用前高优先级任务抢占了当前任务),进而影响到任务的下一次执行的时间,下面来了解一下任务相对延时函数 vTaskDelay()的源码,具体见代码
清单 16-14
#if ( INCLUDE_vTaskDelay == 1 )
void vTaskDelay( const TickType_t xTicksToDelay )
{
BaseType_t xAlreadyYielded = pdFALSE;
/* A delay time of zero just forces a reschedule. */
/* 延时时间要大于 0 个 tick否则会进行强制切换任务 */
if( xTicksToDelay > ( TickType_t ) 0U )
{
configASSERT( uxSchedulerSuspended == 0 );
vTaskSuspendAll();//挂起任务调度器
{
traceTASK_DELAY();
/* A task that is removed from the event list while the
scheduler is suspended will not get placed in the ready
list or removed from the blocked list until the scheduler
is resumed.
This task cannot be in an event list as it is the currently
executing task. */
/* 将任务添加到延时列表中去 */
prvAddCurrentTaskToDelayedList( xTicksToDelay, pdFALSE );
}
xAlreadyYielded = xTaskResumeAll();//恢复任务调度器
}
else
{
mtCOVERAGE_TEST_MARKER();
}
/* Force a reschedule if xTaskResumeAll has not already done so, we may
have put ourselves to sleep. */
/* 强制切换任务,将 PendSV 的 bit28 置 1 */
if( xAlreadyYielded == pdFALSE )
{
portYIELD_WITHIN_API();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
#endif /* INCLUDE_vTaskDelay */
static void prvAddCurrentTaskToDelayedList( TickType_t xTicksToWait, const BaseType_t xCanBlockIndefinitely )
{
//xTicksToWait 表示要延时多长时间,单位为系统节拍周期;xCanBlockIndefinitely 表示是否可以永久阻塞,
//如果 pdFALSE 表示不允许永久阻塞,也就是不允许挂起当然任务,而如果是 pdTRUE,则可以永久阻塞
TickType_t xTimeToWake;
const TickType_t xConstTickCount = xTickCount;//获取当前调用延时函数的时间点
/* Remove the task from the ready list before adding it to the blocked list
as the same list item is used for both lists. */
/* 在将任务添加到阻止列表之前,从就绪列表中删除任务, 因为两个列表都使用相同的列表项。 */
if( uxListRemove( &( pxCurrentTCB->xStateListItem ) ) == ( UBaseType_t ) 0 )
{
/* The current task must be in a ready list, so there is no need to
check, and the port reset macro can be called directly. */
portRESET_READY_PRIORITY( pxCurrentTCB->uxPriority, uxTopReadyPriority );
}
else
{
mtCOVERAGE_TEST_MARKER();
}
#if ( INCLUDE_vTaskSuspend == 1 )
{
if( ( xTicksToWait == portMAX_DELAY ) && ( xCanBlockIndefinitely != pdFALSE ) )
{
/* 支持挂起,则将当前任务挂起,直接将任务添加到挂起列表,而不是延时列表!*/
vListInsertEnd( &xSuspendedTaskList, &( pxCurrentTCB->xStateListItem ) );
}
else
{
/* 计算唤醒任务的时间 */
xTimeToWake = xConstTickCount + xTicksToWait;
/* 列表项将按唤醒时间顺序插入 */
listSET_LIST_ITEM_VALUE( &( pxCurrentTCB->xStateListItem ), xTimeToWake );
if( xTimeToWake < xConstTickCount )
{
/* 唤醒时间如果溢出了,则会添加到延时溢出列表中 */
vListInsert( pxOverflowDelayedTaskList, &( pxCurrentTCB->xStateListItem ) );
}
else
{
/* 没有溢出,添加到延时列表中 */
vListInsert( pxDelayedTaskList, &( pxCurrentTCB->xStateListItem ) );
/* 如果进入阻塞状态的任务被放置在被阻止任务列表的头部,也就是下一个要唤醒的任务就是当前任务,那么就需要更新 xNextTaskUnblockTime 的值 */
if( xTimeToWake < xNextTaskUnblockTime )
{
xNextTaskUnblockTime = xTimeToWake;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
}
}
#else /* INCLUDE_vTaskSuspend */
#endif /* INCLUDE_vTaskSuspend */
}
8.4 vTaskDelayUntil()
在 FreeRTOS 中,除了相对延时函数,还有绝对延时函数vTaskDelayUntil(),这个绝对延时常用于较精确的周期运行任务,比如我有一个任务,希望它以固定频率定期执行,而不受外部的影响,任务从上一次运行开始到下一次运行开始的时间间隔是绝对的,而不是相对的.
vTaskDelayUntil() 与 vTaskDelay () 一 样 都 是 用 来 实 现 任 务 的 周 期 性 延 时 。 *但vTaskDelay ()的延时是相对的,是不确定的,它的延时是等 vTaskDelay ()调用完毕后开始计算的。并且 vTaskDelay ()延时的时间到了之后,如果有高优先级的任务或者中断正在执行,被延时阻塞的任务并不会马上解除阻塞,所有每次执行任务的周期并不完全确定。而
vTaskDelayUntil()延时是绝对的,适用于周期性执行的任务。当(pxPreviousWakeTime + xTimeIncrement)时间到达后,vTaskDelayUntil()函数立刻返回,如果任务是最高优先级的,那么任务会立马解除阻塞,所以说 vTaskDelayUntil()函数的延时是绝对性的
void vTaskDelayUntil( TickType_t * const pxPreviousWakeTime, const TickType_t xTimeIncrement )
{
TickType_t xTimeToWake;
BaseType_t xAlreadyYielded, xShouldDelay = pdFALSE;
configASSERT( pxPreviousWakeTime );
configASSERT( ( xTimeIncrement > 0U ) );
configASSERT( uxSchedulerSuspended == 0 );
vTaskSuspendAll();
{
/* 获取开始进行延时的时间点 */
const TickType_t xConstTickCount = xTickCount;
/* 计算延时到达的时间,也就是唤醒任务的时间 */
xTimeToWake = *pxPreviousWakeTime + xTimeIncrement;
/* pxPreviousWakeTime 中保存的是上次唤醒时间,
唤醒后需要一定时间执行任务主体代码,
如果上次唤醒时间大于当前时间,说明节拍计数器溢出了*/
if( xConstTickCount < *pxPreviousWakeTime )
{
/* 如果唤醒的时间小于上次唤醒时间,
并且唤醒时间大于开始计时的时间,
这样子就是相当于没有溢出,
也就是保了证周期性延时时间大于任务主体代码的执行时间*/
if( ( xTimeToWake < *pxPreviousWakeTime ) && ( xTimeToWake > xConstTickCount ) )
{
xShouldDelay = pdTRUE;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
else
{
/*只是唤醒时间溢出的情况
或者都没溢出,
保证了延时时间大于任务主体代码的执行时间*/
if( ( xTimeToWake < *pxPreviousWakeTime ) || ( xTimeToWake > xConstTickCount ) )
{
xShouldDelay = pdTRUE;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
/*更新上一次的唤醒时间 */
*pxPreviousWakeTime = xTimeToWake;
if( xShouldDelay != pdFALSE )
{
traceTASK_DELAY_UNTIL( xTimeToWake );
/* prvAddCurrentTaskToDelayedList()函数需要的是阻塞时间而不是唤醒时间,因此减去当前的滴答计数。*/
prvAddCurrentTaskToDelayedList( xTimeToWake - xConstTickCount, pdFALSE );
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
xAlreadyYielded = xTaskResumeAll();
/* Force a reschedule if xTaskResumeAll has not already done so, we may
have put ourselves to sleep.
强制执行一次上下文切换 */
if( xAlreadyYielded == pdFALSE )
{
portYIELD_WITHIN_API();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
8.5 任务设计规则
1、一个任务中不能出现死循环,如果出现了,比这个任务低的优先级将无法得到处理。包括空闲任务。
2、中断只做标记发生,然后通知任务去处理。如果中断时间过长,将导致整个任务无法执行。设计时应该考虑中断的频率以及处理的时间长短以便配合中断处理任务的工作。一般频率快,处理时间短的,优先级应该更高。
3、设计时,应保证任务不活跃时,任务进入阻塞状态以交出CPU使用权。
4、注意,空闲任务是优先级最低。
9、队列与消息
9.1概念
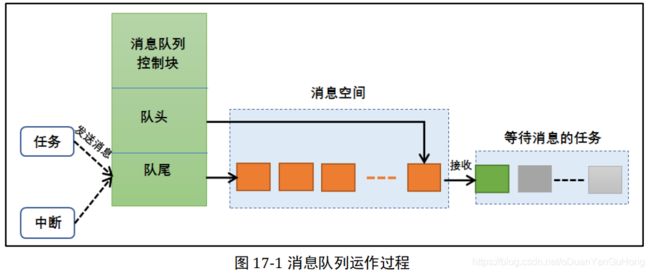
队列又称消息队列,是一种常用于任务间通信的数据结构,队列可以在任务与任务间、中断和任务间传递信息,实现了任务接收来自其他任务或中断的不固定长度的消息,任务能够从队列里面读取消息,当队列中的消息是空时,读取消息的任务将被阻塞,用户还可以指定阻塞的任务时间 xTicksToWait,在这段时间中,如果队列为空,该任务将保持阻塞状态以等待队列数据有效。当队列中有新消息时,被阻塞的任务会被唤醒并处理新消息;当等待的时间超过了指定的阻塞时间,即使队列中尚无有效数据,任务也会自动从阻塞态转为就绪态。消息队列是一种异步的通信方式。
通过消息队列服务,任务或中断服务例程可以将一条或多条消息放入消息队列中。同样,一个或多个任务可以从消息队列中获得消息。当有多个消息发送到消息队列时,通常是将先进入消息队列的消息先传给任务,也就是说,任务先得到的是最先进入消息队列的消息,即先进先出原则(FIFO),但是也支持后进先出原则(LIFO)。
FreeRTOS 中使用队列数据结构实现任务异步通信工作,具有如下特性:
消息支持先进先出方式排队,支持异步读写工作方式。
读写队列均支持超时机制。
消息支持后进先出方式排队,往队首发送消息(LIFO)。 可以允许不同长度(不超过队列节点最大值)的任意类型消息。
一个任务能够从任意一个消息队列接收和发送消息。
多个任务能够从同一个消息队列接收和发送消息。
当队列使用结束后,可以通过删除队列函数进行删除。
消息队列的运作过程具体见图 17-1。
阻塞机制:
入队,队列满可以设置阻塞时间或者不阻塞。
满:直接丢弃
满:等一会
满:一直等有空位置
注意中断中无阻塞,会立马响应。
出队,队列空可以设置阻塞时间或者不阻塞。
没数据:直接走人
没数据:等一会
没数据:一直等
9.2 API
xQueueCreate()函数说明
函数原型
QueueHandle_t xQueueCreate( UBaseType_t uxQueueLength,
UBaseType_t uxItemSize );
参数:
uxQueueLength 队列能够存储的最大消息单元数目,即队列长度。
uxItemSize 队列中消息单元的大小,以字节为单位。
返回:
如果创建成功则返回一个队列句柄,用于访问创建的队列。如果创建不成功则返回NULL,可能原因是创建队列需要的 RAM 无法分配成功。
vQueueDelete();
xQueueSend()与 xQueueSendToBack();
xQueueSendToFront();
xQueueSendFromISR();与 xQueueSendToBackFromISR();
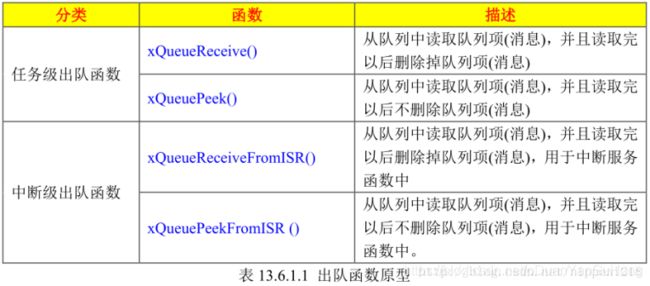
xQueueReceive()与 xQueuePeek();
xQueueReceiveFromISR()与 xQueuePeekFromISR();
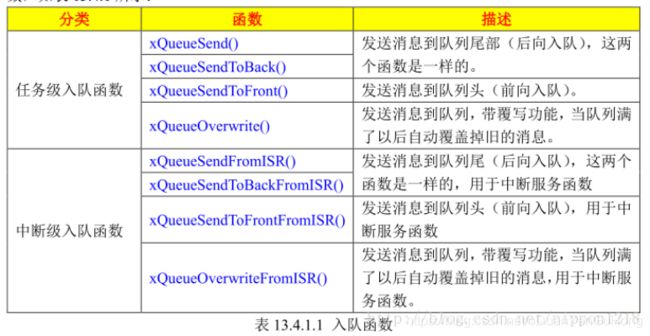
xQueueGenericSendFromISR()函数只能用于中断中执行,是不带阻塞机制的
消息队列删除函数vQueueDelete()
9.3 举例
/**
*********************************************************************
* @file main.c
* @author fire
* @version V1.0
* @date 2018-xx-xx
* @brief FreeRTOS V9.0.0 + STM32 消息队列
* 包含的头文件
*************************************************************************
*/
/* FreeRTOS头文件 */
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
/* 开发板硬件bsp头文件 */
#include "bsp_led.h"
#include "bsp_debug_usart.h"
#include "bsp_key.h"
/**************************** 任务句柄 ********************************/
/*
* 任务句柄是一个指针,用于指向一个任务,当任务创建好之后,它就具有了一个任务句柄
* 以后我们要想操作这个任务都需要通过这个任务句柄,如果是自身的任务操作自己,那么
* 这个句柄可以为NULL。
*/
static TaskHandle_t AppTaskCreate_Handle = NULL;/* 创建任务句柄 */
static TaskHandle_t Receive_Task_Handle = NULL;/* LED任务句柄 */
static TaskHandle_t Send_Task_Handle = NULL;/* KEY任务句柄 */
/********************************** 内核对象句柄 *********************************/
/*
* 信号量,消息队列,事件标志组,软件定时器这些都属于内核的对象,要想使用这些内核
* 对象,必须先创建,创建成功之后会返回一个相应的句柄。实际上就是一个指针,后续我
* 们就可以通过这个句柄操作这些内核对象。
*
* 内核对象说白了就是一种全局的数据结构,通过这些数据结构我们可以实现任务间的通信,
* 任务间的事件同步等各种功能。至于这些功能的实现我们是通过调用这些内核对象的函数
* 来完成的
*
*/
QueueHandle_t Test_Queue =NULL;
/******************************* 全局变量声明 ************************************/
/*
* 当我们在写应用程序的时候,可能需要用到一些全局变量。
*/
/******************************* 宏定义 ************************************/
/*
* 当我们在写应用程序的时候,可能需要用到一些宏定义。
*/
#define QUEUE_LEN 4 /* 队列的长度,最大可包含多少个消息 */
#define QUEUE_SIZE 4 /* 队列中每个消息大小(字节) */
/*
*************************************************************************
* 函数声明
*************************************************************************
*/
static void AppTaskCreate(void);/* 用于创建任务 */
static void Receive_Task(void* pvParameters);/* Receive_Task任务实现 */
static void Send_Task(void* pvParameters);/* Send_Task任务实现 */
static void BSP_Init(void);/* 用于初始化板载相关资源 */
/*****************************************************************
* @brief 主函数
* @param 无
* @retval 无
* @note 第一步:开发板硬件初始化
第二步:创建APP应用任务
第三步:启动FreeRTOS,开始多任务调度
****************************************************************/
int main(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
/* 开发板硬件初始化 */
BSP_Init();
printf("这是一个[野火]-STM32全系列开发板-FreeRTOS消息队列实验!\n");
printf("按下KEY1或者KEY2发送队列消息\n");
printf("Receive任务接收到消息在串口回显\n\n");
/* 创建AppTaskCreate任务 */
xReturn = xTaskCreate((TaskFunction_t )AppTaskCreate, /* 任务入口函数 */
(const char* )"AppTaskCreate",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )1, /* 任务的优先级 */
(TaskHandle_t* )&AppTaskCreate_Handle);/* 任务控制块指针 */
/* 启动任务调度 */
if(pdPASS == xReturn)
vTaskStartScheduler(); /* 启动任务,开启调度 */
else
return -1;
while(1); /* 正常不会执行到这里 */
}
/***********************************************************************
* @ 函数名 : AppTaskCreate
* @ 功能说明: 为了方便管理,所有的任务创建函数都放在这个函数里面
* @ 参数 : 无
* @ 返回值 : 无
**********************************************************************/
static void AppTaskCreate(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
taskENTER_CRITICAL(); //进入临界区
/* 创建Test_Queue */
Test_Queue = xQueueCreate((UBaseType_t ) QUEUE_LEN,/* 消息队列的长度 */
(UBaseType_t ) QUEUE_SIZE);/* 消息的大小 */
if(NULL != Test_Queue)
printf("创建Test_Queue消息队列成功!\r\n");
/* 创建Receive_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )Receive_Task, /* 任务入口函数 */
(const char* )"Receive_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL, /* 任务入口函数参数 */
(UBaseType_t )2, /* 任务的优先级 */
(TaskHandle_t* )&Receive_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建Receive_Task任务成功!\r\n");
/* 创建Send_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )Send_Task, /* 任务入口函数 */
(const char* )"Send_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )3, /* 任务的优先级 */
(TaskHandle_t* )&Send_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建Send_Task任务成功!\n\n");
vTaskDelete(AppTaskCreate_Handle); //删除AppTaskCreate任务
taskEXIT_CRITICAL(); //退出临界区
}
/**********************************************************************
* @ 函数名 : Receive_Task
* @ 功能说明: Receive_Task任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void Receive_Task(void* parameter)
{
BaseType_t xReturn = pdTRUE;/* 定义一个创建信息返回值,默认为pdTRUE */
uint32_t r_queue; /* 定义一个接收消息的变量 */
while (1)
{
xReturn = xQueueReceive( Test_Queue, /* 消息队列的句柄 */
&r_queue, /* 发送的消息内容 */
portMAX_DELAY); /* 等待时间 一直等 */
if(pdTRUE == xReturn)
printf("本次接收到的数据是%d\n\n",r_queue);
else
printf("数据接收出错,错误代码0x%lx\n",xReturn);
}
}
/**********************************************************************
* @ 函数名 : Send_Task
* @ 功能说明: Send_Task任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void Send_Task(void* parameter)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
uint32_t send_data1 = 1;
uint32_t send_data2 = 2;
while (1)
{
if( Key_Scan(KEY1_GPIO_PORT,KEY1_PIN) == KEY_ON )
{
/* K1 被按下 */
printf("发送消息send_data1!\n");
xReturn = xQueueSend( Test_Queue, /* 消息队列的句柄 */
&send_data1,/* 发送的消息内容 */
0 ); /* 等待时间 0 */
if(pdPASS == xReturn)
printf("消息send_data1发送成功!\n\n");
}
if( Key_Scan(KEY2_GPIO_PORT,KEY2_PIN) == KEY_ON )
{
/* K2 被按下 */
printf("发送消息send_data2!\n");
xReturn = xQueueSend( Test_Queue, /* 消息队列的句柄 */
&send_data2,/* 发送的消息内容 */
0 ); /* 等待时间 0 */
if(pdPASS == xReturn)
printf("消息send_data2发送成功!\n\n");
}
vTaskDelay(20);/* 延时20个tick */
}
}
/***********************************************************************
* @ 函数名 : BSP_Init
* @ 功能说明: 板级外设初始化,所有板子上的初始化均可放在这个函数里面
* @ 参数 :
* @ 返回值 : 无
*********************************************************************/
static void BSP_Init(void)
{
/*
* STM32中断优先级分组为4,即4bit都用来表示抢占优先级,范围为:0~15
* 优先级分组只需要分组一次即可,以后如果有其他的任务需要用到中断,
* 都统一用这个优先级分组,千万不要再分组,切忌。
*/
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 );
/* LED 初始化 */
LED_GPIO_Config();
/* 串口初始化 */
Debug_USART_Config();
/* 按键初始化 */
Key_GPIO_Config();
}
/********************************END OF FILE****************************/
10、信号量
10.1信号量、互斥信号量、计数信号量运用场景与概念
*二值信号量:更倾向于任务与任务间,任务与中断间的同步。可以将二值信号量看作只有一个消息的队列,因此这个队列只能为空或满(因此称为二值),我们在运用的时候只需要知道队列中是否有消息即可,而无需关注消息是什么。
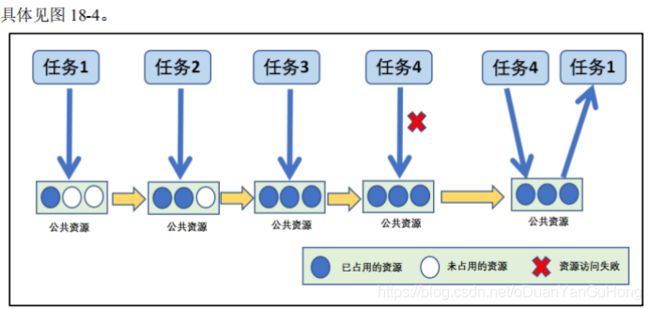
*计数信号量:计数、以及资源的管理。
比如某个资源限定只能有3个任务访问,那么第4个任务访问的时候,会因为获取不到信号量而进入阻塞,等到有任务(比如任务1)释放掉该资源的时候,第4个任务才能获取到信号量从而进行资源的访问,其运作的机制
10.2二值信号量、计数信号量
*在嵌入式操作系统中二值信号量是任务间、任务与中断间同步的重要手段。
*计数信号量可以用于资源管理,允许多个任务获取信号量访问共享资源,但会限制任
务的最大数目。
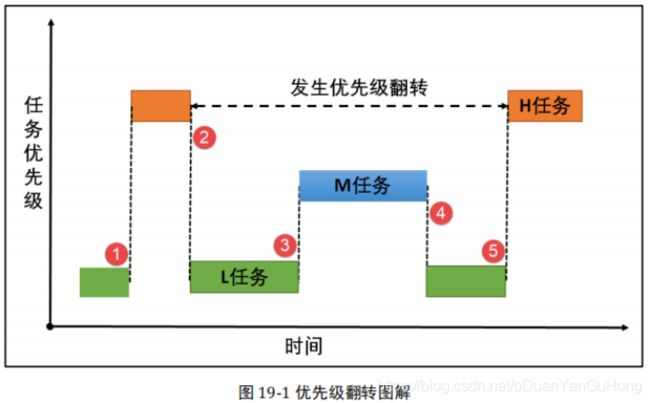
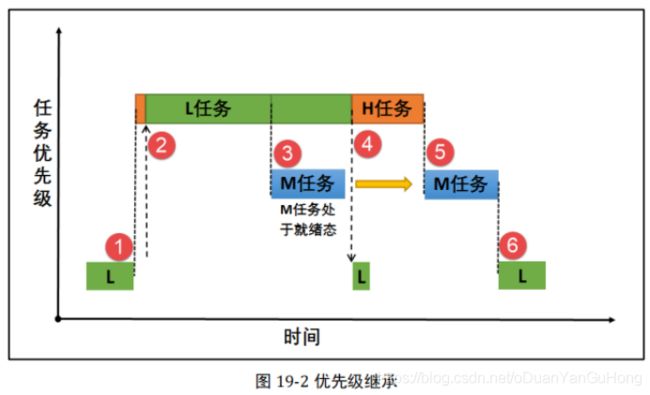
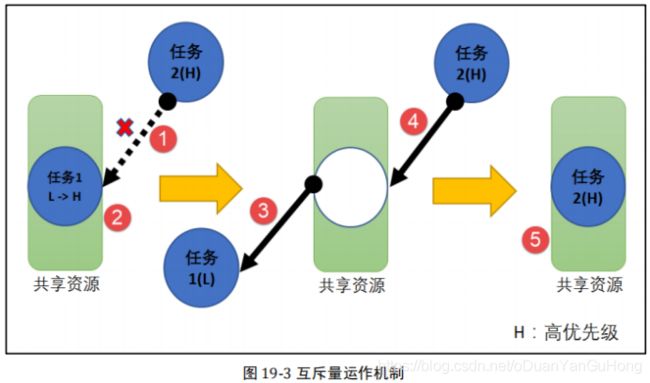
10.3 优先级翻转与优先级继承
某些资源只有一个,当低优先级任务正在占用该资源的时候,即便高优先级任务也只能乖乖的等待低优先级任务使用完该资源后释放资源。这里高优先级任务无法运行而低优先级任务可以运行的现象称为“优先级翻转”。优先级继承机制确保高优先级任务进入阻塞状态的时间尽可能短,以及将已经出现的“优先级翻转”危害降低到最小。
10.4 信号量函数
10.4.1xSemaphoreCreateBinary()
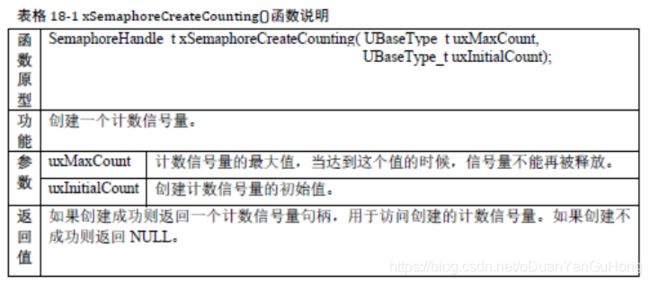
10.4.2 xSemaphoreCreateCounting()
举例:
/**
*********************************************************************
* @file main.c
* @author fire
* @version V1.0
* @date 2018-xx-xx
* @brief FreeRTOS V9.0.0 + STM32 计数信号量实验
*********************************************************************
*/
/*
*************************************************************************
* 包含的头文件
*************************************************************************
*/
/* FreeRTOS头文件 */
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
#include "semphr.h"
/* 开发板硬件bsp头文件 */
#include "bsp_led.h"
#include "bsp_debug_usart.h"
#include "bsp_key.h"
/**************************** 任务句柄 ********************************/
/*
* 任务句柄是一个指针,用于指向一个任务,当任务创建好之后,它就具有了一个任务句柄
* 以后我们要想操作这个任务都需要通过这个任务句柄,如果是自身的任务操作自己,那么
* 这个句柄可以为NULL。
*/
static TaskHandle_t AppTaskCreate_Handle = NULL;/* 创建任务句柄 */
static TaskHandle_t Take_Task_Handle = NULL;/* Take_Task任务句柄 */
static TaskHandle_t Give_Task_Handle = NULL;/* Give_Task任务句柄 */
/********************************** 内核对象句柄 *********************************/
/*
* 信号量,消息队列,事件标志组,软件定时器这些都属于内核的对象,要想使用这些内核
* 对象,必须先创建,创建成功之后会返回一个相应的句柄。实际上就是一个指针,后续我
* 们就可以通过这个句柄操作这些内核对象。
*
* 内核对象说白了就是一种全局的数据结构,通过这些数据结构我们可以实现任务间的通信,
* 任务间的事件同步等各种功能。至于这些功能的实现我们是通过调用这些内核对象的函数
* 来完成的
*
*/
SemaphoreHandle_t CountSem_Handle =NULL;
/******************************* 全局变量声明 ************************************/
/*
* 当我们在写应用程序的时候,可能需要用到一些全局变量。
*/
/******************************* 宏定义 ************************************/
/*
* 当我们在写应用程序的时候,可能需要用到一些宏定义。
*/
/*
*************************************************************************
* 函数声明
*************************************************************************
*/
static void AppTaskCreate(void);/* 用于创建任务 */
static void Take_Task(void* pvParameters);/* Take_Task任务实现 */
static void Give_Task(void* pvParameters);/* Give_Task任务实现 */
static void BSP_Init(void);/* 用于初始化板载相关资源 */
/*****************************************************************
* @brief 主函数
* @param 无
* @retval 无
* @note 第一步:开发板硬件初始化
第二步:创建APP应用任务
第三步:启动FreeRTOS,开始多任务调度
****************************************************************/
int main(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
/* 开发板硬件初始化 */
BSP_Init();
printf("这是一个[野火]-STM32全系列开发板-FreeRTOS计数信号量实验!\n");
printf("车位默认值为5个,按下KEY1申请车位,按下KEY2释放车位!\n\n");
/* 创建AppTaskCreate任务 */
xReturn = xTaskCreate((TaskFunction_t )AppTaskCreate, /* 任务入口函数 */
(const char* )"AppTaskCreate",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )1, /* 任务的优先级 */
(TaskHandle_t* )&AppTaskCreate_Handle);/* 任务控制块指针 */
/* 启动任务调度 */
if(pdPASS == xReturn)
vTaskStartScheduler(); /* 启动任务,开启调度 */
else
return -1;
while(1); /* 正常不会执行到这里 */
}
/***********************************************************************
* @ 函数名 : AppTaskCreate
* @ 功能说明: 为了方便管理,所有的任务创建函数都放在这个函数里面
* @ 参数 : 无
* @ 返回值 : 无
**********************************************************************/
static void AppTaskCreate(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
taskENTER_CRITICAL(); //进入临界区
/* 创建Test_Queue */
CountSem_Handle = xSemaphoreCreateCounting(5,5);
if(NULL != CountSem_Handle)
printf("CountSem_Handle计数信号量创建成功!\r\n");
/* 创建Take_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )Take_Task, /* 任务入口函数 */
(const char* )"Take_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL, /* 任务入口函数参数 */
(UBaseType_t )2, /* 任务的优先级 */
(TaskHandle_t* )&Take_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建Take_Task任务成功!\r\n");
/* 创建Give_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )Give_Task, /* 任务入口函数 */
(const char* )"Give_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )3, /* 任务的优先级 */
(TaskHandle_t* )&Give_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建Give_Task任务成功!\n\n");
vTaskDelete(AppTaskCreate_Handle); //删除AppTaskCreate任务
taskEXIT_CRITICAL(); //退出临界区
}
/**********************************************************************
* @ 函数名 : Take_Task
* @ 功能说明: Take_Task任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void Take_Task(void* parameter)
{
BaseType_t xReturn = pdTRUE;/* 定义一个创建信息返回值,默认为pdPASS */
/* 任务都是一个无限循环,不能返回 */
while (1)
{
//如果KEY1被单击
if( Key_Scan(KEY1_GPIO_PORT,KEY1_PIN) == KEY_ON )
{
/* 获取一个计数信号量 */
xReturn = xSemaphoreTake(CountSem_Handle, /* 计数信号量句柄 */
0); /* 等待时间:0 */
if ( pdTRUE == xReturn )
printf( "KEY1被按下,成功申请到停车位。\n" );
else
printf( "KEY1被按下,不好意思,现在停车场已满!\n" );
}
vTaskDelay(20); //每20ms扫描一次
}
}
/**********************************************************************
* @ 函数名 : Give_Task
* @ 功能说明: Give_Task任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void Give_Task(void* parameter)
{
BaseType_t xReturn = pdTRUE;/* 定义一个创建信息返回值,默认为pdPASS */
/* 任务都是一个无限循环,不能返回 */
while (1)
{
//如果KEY2被单击
if( Key_Scan(KEY2_GPIO_PORT,KEY2_PIN) == KEY_ON )
{
/* 获取一个计数信号量 */
xReturn = xSemaphoreGive(CountSem_Handle);//给出计数信号量
if ( pdTRUE == xReturn )
printf( "KEY2被按下,释放1个停车位。\n" );
else
printf( "KEY2被按下,但已无车位可以释放!\n" );
}
vTaskDelay(20); //每20ms扫描一次
}
}
/***********************************************************************
* @ 函数名 : BSP_Init
* @ 功能说明: 板级外设初始化,所有板子上的初始化均可放在这个函数里面
* @ 参数 :
* @ 返回值 : 无
*********************************************************************/
static void BSP_Init(void)
{
/*
* STM32中断优先级分组为4,即4bit都用来表示抢占优先级,范围为:0~15
* 优先级分组只需要分组一次即可,以后如果有其他的任务需要用到中断,
* 都统一用这个优先级分组,千万不要再分组,切忌。
*/
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 );
/* LED 初始化 */
LED_GPIO_Config();
/* 按键初始化 */
Key_GPIO_Config();
/* 串口初始化 */
Debug_USART_Config();
}
/********************************END OF FILE****************************/
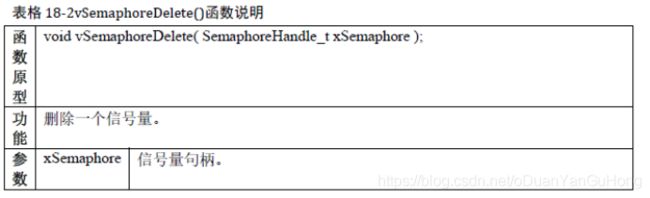
10.4.3vSemaphoreDelete()
vSemaphoreDelete()用于删除一个信号量,包括二值信号量,计数信号量,互斥量和递归互斥量。如果有任务阻塞在该信号量上,那么不要删除该信号量。
10.4.4 xSemaphoreGive( BinarySem_Handle );
//给出二值信号量
释放的信号量对象必须是已经被创建的,可以用于二值信号量、计数信号量、互斥量的释放,但不能释放由函xSemaphoreCreateRecursiveMutex()创建的递归互斥量。此外该函数不能在中断中使用
10.4.5xSemaphoreGiveFromISR(BinarySem_Handle,&pxHigherPriorityTaskWoken);
BaseType_t pxHigherPriorityTaskWoken; 用于释放一个信号量,带中断保护。被释放的信号量可以是二进制信号量和计数信号量。
10.4.6 xSemaphoreTake( xSemaphore, xBlockTime )
获取一个信号量,可以是二值信号量、计数信号量、互斥量。
10.4.7xSemaphoreTakeFromISR(SemaphoreHandle_t xSemaphore,signed BaseType_t *pxHigherPriorityTaskWoken)
10.4.8 uxSemaphoreGetCount()
在中断中获一个信号量(其实很少在中断中获取信号量)。可以是二值信号量、计数信号量。
10.5 特别注意
二值信号量、互斥信号量创建完成后即可后取一次信号量
及xSemephoreTake(xSemaphore_Hanlde)是可以执行一次的。
11、互斥信号量
11.1 概念
互斥量又称互斥信号量(本质是信号量),是一种特殊的二值信号量,**它和信号量不同的是,它支持互斥量所有权、递归访问以及防止优先级翻转的特性,用于实现对临界资源的独占式处理。**任意时刻互斥量的状态只有两种,开锁或闭锁。当互斥量被任务持有时,该互斥量处于闭锁状态,这个任务获得互斥量的所有权。当该任务释放这个互斥量时,该互斥量处于开锁状态,任务失去该互斥量的所有权。
*互斥信号量:倾向于临界资源的访问。
如果一旦有任务成功获得了互斥量,则互斥量立即变为闭锁状态,此时其他任务会 因为获取不到互斥量而不能访问这个资源,任务会根据用户自定义的等待时间进行等待, 直到互斥量被持有的任务释放后,其他任务才能获取互斥量从而得以访问该临界资源,此 时互斥量再次上锁,如此一来就可以确保每个时刻只有一个任务正在访问这个临界资源, 保证了临界资源操作的安全性。
如果想要用于实现同步(任务之间或者任务与中断之间),二值信号量或许是更好的选择,虽然互斥量也可以用于任务与任务、任务与中断的同步,但是互斥量更多的是用于保护资源的互锁。
·
互斥量与二值信号量最大的不同是:互斥量具有优先级继承机制,而信号量没有。
11.2 运用场景
互斥量更适合于:
可能会引起优先级翻转的情况。
递归互斥量更适用于:
任务可能会多次获取互斥量的情况下。这样可以避免同一任务多次递归持有而造成死锁的问题。
多任务环境下往往存在多个任务竞争同一临界资源的应用场景,互斥量可被用于对临界资源的保护从而实现独占式访问。另外,互斥量可以降低信号量存在的优先级翻转问题带来的影响。
比如有两个任务需要对串口进行发送数据,其硬件资源只有一个,那么两个任务肯定不能同时发送啦,不然导致数据错误,那么,就可以用互斥量对串口资源进行保护,当一个任务正在使用串口的时候,另一个任务则无法使用串口,等到任务使用串口完毕之后,另外一个任务才能获得串口的使用权。
另外需要注意的是互斥量不能在中断服务函数中使用,因为其特有的优先级继承机制只在任务起作用,在中断的上下文环境毫无意义。
11.3 API函数
11.3.1 互斥量创建函数xSemaphoreCreateMutex()
11.3.2 xSemaphoreCreateMutexStatic()
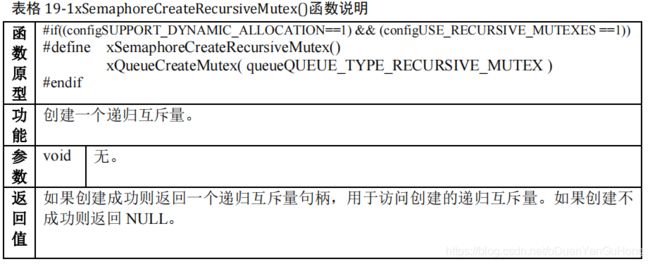
11.3.3 递归互斥量创建函数xSem’CreateRecursiveMutex()
递归互斥量创建函数
11.3.4xSem’CreateRecursiveMutexStatic()
11.3.5xSemaphoreGetMutexHolder()
11.3.6 递归互斥量获取函数xSemaphoreTakeRecursive()
11.3.7 互斥量删除函数 vSemaphoreDelete()
11.3.8 互斥量获取函数 xSemaphoreTake()
11.3.9 互斥量释放函数 xSemaphoreGive()
11.3.10 递归互斥量释放函数 xSemaphoreGiveRecursive()
11.4 互斥信号量举例
/**
*********************************************************************
* @file main.c
* @author fire
* @version V1.0
* @date 2018-xx-xx
* @brief FreeRTOS V9.0.0 + STM32 互斥量
**********************************************************************
*/
/*
*************************************************************************
* 包含的头文件
*************************************************************************
*/
/* FreeRTOS头文件 */
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
#include "semphr.h"
/* 开发板硬件bsp头文件 */
#include "bsp_led.h"
#include "bsp_debug_usart.h"
#include "bsp_key.h"
/**************************** 任务句柄 ********************************/
/*
* 任务句柄是一个指针,用于指向一个任务,当任务创建好之后,它就具有了一个任务句柄
* 以后我们要想操作这个任务都需要通过这个任务句柄,如果是自身的任务操作自己,那么
* 这个句柄可以为NULL。
*/
static TaskHandle_t AppTaskCreate_Handle = NULL;/* 创建任务句柄 */
static TaskHandle_t LowPriority_Task_Handle = NULL;/* LowPriority_Task任务句柄 */
static TaskHandle_t MidPriority_Task_Handle = NULL;/* MidPriority_Task任务句柄 */
static TaskHandle_t HighPriority_Task_Handle = NULL;/* HighPriority_Task任务句柄 */
/********************************** 内核对象句柄 *********************************/
/*
* 信号量,消息队列,事件标志组,软件定时器这些都属于内核的对象,要想使用这些内核
* 对象,必须先创建,创建成功之后会返回一个相应的句柄。实际上就是一个指针,后续我
* 们就可以通过这个句柄操作这些内核对象。
*
* 内核对象说白了就是一种全局的数据结构,通过这些数据结构我们可以实现任务间的通信,
* 任务间的事件同步等各种功能。至于这些功能的实现我们是通过调用这些内核对象的函数
* 来完成的
*
*/
SemaphoreHandle_t MuxSem_Handle =NULL;
/******************************* 全局变量声明 ************************************/
/*
* 当我们在写应用程序的时候,可能需要用到一些全局变量。
*/
/******************************* 宏定义 ************************************/
/*
* 当我们在写应用程序的时候,可能需要用到一些宏定义。
*/
/*
*************************************************************************
* 函数声明
*************************************************************************
*/
static void AppTaskCreate(void);/* 用于创建任务 */
static void LowPriority_Task(void* pvParameters);/* LowPriority_Task任务实现 */
static void MidPriority_Task(void* pvParameters);/* MidPriority_Task任务实现 */
static void HighPriority_Task(void* pvParameters);/* MidPriority_Task任务实现 */
static void BSP_Init(void);/* 用于初始化板载相关资源 */
/*****************************************************************
* @brief 主函数
* @param 无
* @retval 无
* @note 第一步:开发板硬件初始化
第二步:创建APP应用任务
第三步:启动FreeRTOS,开始多任务调度
****************************************************************/
int main(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
/* 开发板硬件初始化 */
BSP_Init();
printf("这是一个[野火]-STM32全系列开发板-FreeRTOS互斥量实验!\n");
/* 创建AppTaskCreate任务 */
xReturn = xTaskCreate((TaskFunction_t )AppTaskCreate, /* 任务入口函数 */
(const char* )"AppTaskCreate",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )1, /* 任务的优先级 */
(TaskHandle_t* )&AppTaskCreate_Handle);/* 任务控制块指针 */
/* 启动任务调度 */
if(pdPASS == xReturn)
vTaskStartScheduler(); /* 启动任务,开启调度 */
else
return -1;
while(1); /* 正常不会执行到这里 */
}
/***********************************************************************
* @ 函数名 : AppTaskCreate
* @ 功能说明: 为了方便管理,所有的任务创建函数都放在这个函数里面
* @ 参数 : 无
* @ 返回值 : 无
**********************************************************************/
static void AppTaskCreate(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
taskENTER_CRITICAL(); //进入临界区
/* 创建MuxSem */
MuxSem_Handle = xSemaphoreCreateMutex();
if(NULL != MuxSem_Handle)
printf("MuxSem_Handle互斥量创建成功!\r\n");
xReturn = xSemaphoreGive( MuxSem_Handle );//给出互斥量
// if( xReturn == pdTRUE )
// printf("释放信号量!\r\n");
/* 创建LowPriority_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )LowPriority_Task, /* 任务入口函数 */
(const char* )"LowPriority_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL, /* 任务入口函数参数 */
(UBaseType_t )2, /* 任务的优先级 */
(TaskHandle_t* )&LowPriority_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建LowPriority_Task任务成功!\r\n");
/* 创建MidPriority_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )MidPriority_Task, /* 任务入口函数 */
(const char* )"MidPriority_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )3, /* 任务的优先级 */
(TaskHandle_t* )&MidPriority_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建MidPriority_Task任务成功!\n");
/* 创建HighPriority_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )HighPriority_Task, /* 任务入口函数 */
(const char* )"HighPriority_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )4, /* 任务的优先级 */
(TaskHandle_t* )&HighPriority_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建HighPriority_Task任务成功!\n\n");
vTaskDelete(AppTaskCreate_Handle); //删除AppTaskCreate任务
taskEXIT_CRITICAL(); //退出临界区
}
/**********************************************************************
* @ 函数名 : LowPriority_Task
* @ 功能说明: LowPriority_Task任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void LowPriority_Task(void* parameter)
{
static uint32_t i;
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
while (1)
{
printf("LowPriority_Task 获取互斥量\n");
//获取互斥量 MuxSem,没获取到则一直等待
xReturn = xSemaphoreTake(MuxSem_Handle,/* 互斥量句柄 */
portMAX_DELAY); /* 等待时间 */
if(pdTRUE == xReturn)
printf("LowPriority_Task Runing\n\n");
for(i=0;i<4000000;i++)//模拟低优先级任务占用互斥量
{
taskYIELD();//发起任务调度
}
printf("LowPriority_Task 释放互斥量!\r\n");
xReturn = xSemaphoreGive( MuxSem_Handle );//给出互斥量
LED1_TOGGLE;
vTaskDelay(1000);
}
}
/**********************************************************************
* @ 函数名 : MidPriority_Task
* @ 功能说明: MidPriority_Task任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void MidPriority_Task(void* parameter)
{
while (1)
{
printf("MidPriority_Task Runing\n");
vTaskDelay(1000);
}
}
/**********************************************************************
* @ 函数名 : HighPriority_Task
* @ 功能说明: HighPriority_Task 任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void HighPriority_Task(void* parameter)
{
BaseType_t xReturn = pdTRUE;/* 定义一个创建信息返回值,默认为pdPASS */
while (1)
{
printf("HighPriority_Task 获取互斥量\n");
//获取互斥量 MuxSem,没获取到则一直等待
xReturn = xSemaphoreTake(MuxSem_Handle,/* 互斥量句柄 */
portMAX_DELAY); /* 等待时间 */
if(pdTRUE == xReturn)
printf("HighPriority_Task Runing\n");
LED1_TOGGLE;
printf("HighPriority_Task 释放互斥量!\r\n");
xReturn = xSemaphoreGive( MuxSem_Handle );//给出互斥量
vTaskDelay(1000);
}
}
/***********************************************************************
* @ 函数名 : BSP_Init
* @ 功能说明: 板级外设初始化,所有板子上的初始化均可放在这个函数里面
* @ 参数 :
* @ 返回值 : 无
*********************************************************************/
static void BSP_Init(void)
{
/*
* STM32中断优先级分组为4,即4bit都用来表示抢占优先级,范围为:0~15
* 优先级分组只需要分组一次即可,以后如果有其他的任务需要用到中断,
* 都统一用这个优先级分组,千万不要再分组,切忌。
*/
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 );
/* LED 初始化 */
LED_GPIO_Config();
/* 串口初始化 */
Debug_USART_Config();
/* 按键初始化 */
Key_GPIO_Config();
}
/********************************END OF FILE****************************/
可以看到高优先级任务在等待低优先级任务运行完毕才能得到信号量继续运行,具体见
图 19-5。

12、事件
12.1特点
FreeRTOS 提供的事件具有如下特点:
事件只与任务相关联,事件相互独立,一个 32 位的事件集(EventBits_t 类型的 变量,实际可用与表示事件的只有 24 位),用于标识该任务发生的事件类型,其 中每一位表示一种事件类型(0 表示该事件类型未发生、1 表示该事件类型已经发 生),一共 24 种事件类型。
事件仅用于同步,不提供数据传输功能。
事件无排队性,即多次向任务设置同一事件(如果任务还未来得及读走),等效于 只设置一次。
允许多个任务对同一事件进行读写操作。
支持事件等待超时机制。
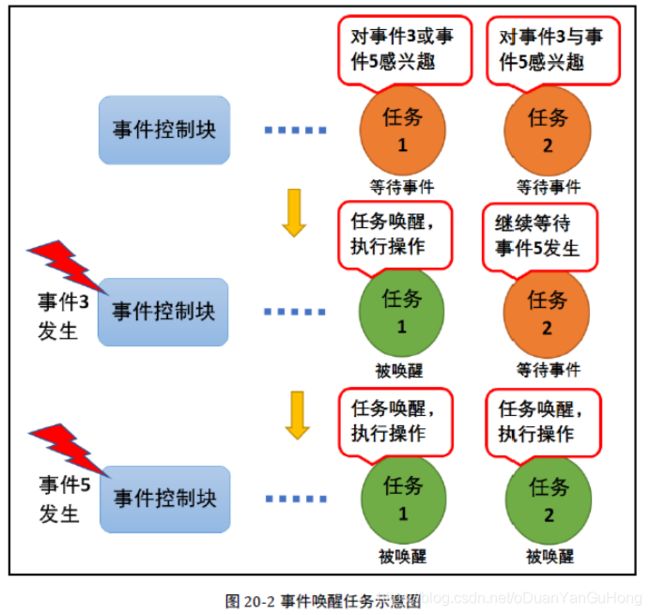
事件唤醒机制,当任务因为等待某个或者多个事件发生而进入阻塞态,当事件发生的时候会被唤醒,其过程具体见图 20-2。
12.2 事件与全局变量的区别
如果为全局变量
如何对全局变量进行保护呢,如何处理多任务同时对它进行访问?
如何让内核对事件进行有效管理呢?使用全局变量的话,就需要在任务中轮询查 看事件是否发送,这简直就是在浪费 CPU 资源啊,还有等待超时机制,使用全局 变量的话需要用户自己去实现。
全局变量无法实现里面的超时机制。
12.3 API函数
12.3.1 xEventGroupCreate( )
12.3.2 vEventGroupDelete()
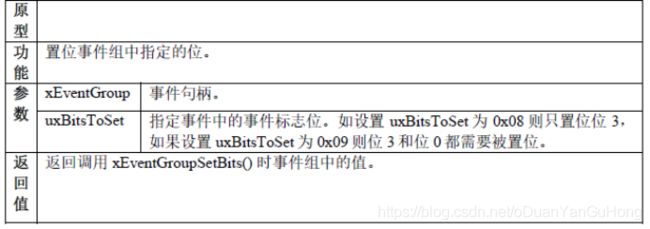
12.3.3 xEventGroupSetBits()

举例:
举例:
#define KEY1_EVENT (1<<0)//K1 事件
#define KEY2_EVENT (1<<1)//K2 事件
Event_Handle = xEventGroupCreate();
xEventGroupSetBits(Event_Handle,KEY1_EVENT);
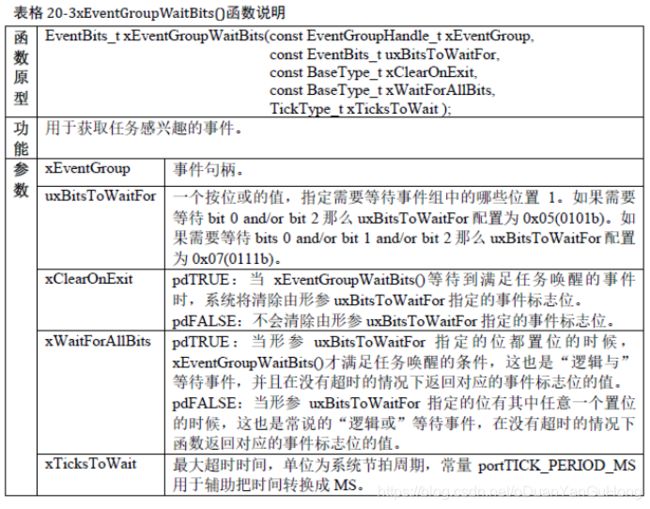
12.3.4 xEventGroupWaitBits()
等待事件函数,详细见下表

12.3.5 xEventGroupClearBits()
12.3.6 xEventGroupClearBitsFromISR()
xEventGroupClearBits()与xEventGroupClearBitsFromISR()都是用于清除事件组指定的位,如果在获取事件的时候没有将对应的标志位清除,那么就需要用这个函数来进行显式清除,xEventGroupClearBits()函数不能在中断中使用,而是由具有中断保护功能的 xEventGroupClearBitsFromISR() 来代替,中断清除事件标志位的操作在守护任务(也叫定时器服务任务)里面完成。
12.4 举例
/**
*********************************************************************
* @file main.c
* @author fire
* @version V1.0
* @date 2018-xx-xx
* @brief FreeRTOS V9.0.0 + STM32 事件 **********************************************************************
*/
/*
*************************************************************************
* 包含的头文件
*************************************************************************
*/
/* FreeRTOS头文件 */
#include "FreeRTOS.h"
#include "task.h"
#include "event_groups.h"
/* 开发板硬件bsp头文件 */
#include "bsp_led.h"
#include "bsp_debug_usart.h"
#include "bsp_key.h"
/**************************** 任务句柄 ********************************/
/*
* 任务句柄是一个指针,用于指向一个任务,当任务创建好之后,它就具有了一个任务句柄
* 以后我们要想操作这个任务都需要通过这个任务句柄,如果是自身的任务操作自己,那么
* 这个句柄可以为NULL。
*/
static TaskHandle_t AppTaskCreate_Handle = NULL;/* 创建任务句柄 */
static TaskHandle_t LED_Task_Handle = NULL;/* LED_Task任务句柄 */
static TaskHandle_t KEY_Task_Handle = NULL;/* KEY_Task任务句柄 */
/********************************** 内核对象句柄 *********************************/
/*
* 信号量,消息队列,事件标志组,软件定时器这些都属于内核的对象,要想使用这些内核
* 对象,必须先创建,创建成功之后会返回一个相应的句柄。实际上就是一个指针,后续我
* 们就可以通过这个句柄操作这些内核对象。
*
* 内核对象说白了就是一种全局的数据结构,通过这些数据结构我们可以实现任务间的通信,
* 任务间的事件同步等各种功能。至于这些功能的实现我们是通过调用这些内核对象的函数
* 来完成的
*
*/
static EventGroupHandle_t Event_Handle =NULL;
/******************************* 全局变量声明 ************************************/
/*
* 当我们在写应用程序的时候,可能需要用到一些全局变量。
*/
/******************************* 宏定义 ************************************/
/*
* 当我们在写应用程序的时候,可能需要用到一些宏定义。
*/
#define KEY1_EVENT (0x01 << 0)//设置事件掩码的位0
#define KEY2_EVENT (0x01 << 1)//设置事件掩码的位1
/*
*************************************************************************
* 函数声明
*************************************************************************
*/
static void AppTaskCreate(void);/* 用于创建任务 */
static void LED_Task(void* pvParameters);/* LED_Task 任务实现 */
static void KEY_Task(void* pvParameters);/* KEY_Task 任务实现 */
static void BSP_Init(void);/* 用于初始化板载相关资源 */
/*****************************************************************
* @brief 主函数
* @param 无
* @retval 无
* @note 第一步:开发板硬件初始化
第二步:创建APP应用任务
第三步:启动FreeRTOS,开始多任务调度
****************************************************************/
int main(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
/* 开发板硬件初始化 */
BSP_Init();
printf("这是一个[野火]-STM32全系列开发板-FreeRTOS事件标志组实验!\n");
/* 创建AppTaskCreate任务 */
xReturn = xTaskCreate((TaskFunction_t )AppTaskCreate, /* 任务入口函数 */
(const char* )"AppTaskCreate",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )1, /* 任务的优先级 */
(TaskHandle_t* )&AppTaskCreate_Handle);/* 任务控制块指针 */
/* 启动任务调度 */
if(pdPASS == xReturn)
vTaskStartScheduler(); /* 启动任务,开启调度 */
else
return -1;
while(1); /* 正常不会执行到这里 */
}
/***********************************************************************
* @ 函数名 : AppTaskCreate
* @ 功能说明: 为了方便管理,所有的任务创建函数都放在这个函数里面
* @ 参数 : 无
* @ 返回值 : 无
**********************************************************************/
static void AppTaskCreate(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
taskENTER_CRITICAL(); //进入临界区
/* 创建 Event_Handle */
Event_Handle = xEventGroupCreate();
if(NULL != Event_Handle)
printf("Event_Handle 事件创建成功!\r\n");
/* 创建LED_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )LED_Task, /* 任务入口函数 */
(const char* )"LED_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL, /* 任务入口函数参数 */
(UBaseType_t )2, /* 任务的优先级 */
(TaskHandle_t* )&LED_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建LED_Task任务成功!\r\n");
/* 创建KEY_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )KEY_Task, /* 任务入口函数 */
(const char* )"KEY_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )3, /* 任务的优先级 */
(TaskHandle_t* )&KEY_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建KEY_Task任务成功!\n");
vTaskDelete(AppTaskCreate_Handle); //删除AppTaskCreate任务
taskEXIT_CRITICAL(); //退出临界区
}
/**********************************************************************
* @ 函数名 : LED_Task
* @ 功能说明: LED_Task任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void LED_Task(void* parameter)
{
EventBits_t r_event; /* 定义一个事件接收变量 */
/* 任务都是一个无限循环,不能返回 */
while (1)
{
/*******************************************************************
* 等待接收事件标志
*
* 如果xClearOnExit设置为pdTRUE,那么在xEventGroupWaitBits()返回之前,
* 如果满足等待条件(如果函数返回的原因不是超时),那么在事件组中设置
* 的uxBitsToWaitFor中的任何位都将被清除。
* 如果xClearOnExit设置为pdFALSE,
* 则在调用xEventGroupWaitBits()时,不会更改事件组中设置的位。
*
* xWaitForAllBits如果xWaitForAllBits设置为pdTRUE,则当uxBitsToWaitFor中
* 的所有位都设置或指定的块时间到期时,xEventGroupWaitBits()才返回。
* 如果xWaitForAllBits设置为pdFALSE,则当设置uxBitsToWaitFor中设置的任何
* 一个位置1 或指定的块时间到期时,xEventGroupWaitBits()都会返回。
* 阻塞时间由xTicksToWait参数指定。
*********************************************************/
r_event = xEventGroupWaitBits(Event_Handle, /* 事件对象句柄 */
KEY1_EVENT|KEY2_EVENT,/* 接收线程感兴趣的事件 */
pdTRUE, /* 退出时清除事件位 */
pdTRUE, /* 满足感兴趣的所有事件 */
portMAX_DELAY);/* 指定超时事件,一直等 */
if((r_event & (KEY1_EVENT|KEY2_EVENT)) == (KEY1_EVENT|KEY2_EVENT))
{
/* 如果接收完成并且正确 */
printf ( "KEY1与KEY2都按下\n");
LED1_TOGGLE; //LED1 反转
}
else
printf ( "事件错误!\n");
}
}
/**********************************************************************
* @ 函数名 : KEY_Task
* @ 功能说明: KEY_Task任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void KEY_Task(void* parameter)
{
/* 任务都是一个无限循环,不能返回 */
while (1)
{
if( Key_Scan(KEY1_GPIO_PORT,KEY1_PIN) == KEY_ON ) //如果KEY2被单击
{
printf ( "KEY1被按下\n" );
/* 触发一个事件1 */
xEventGroupSetBits(Event_Handle,KEY1_EVENT);
}
if( Key_Scan(KEY2_GPIO_PORT,KEY2_PIN) == KEY_ON ) //如果KEY2被单击
{
printf ( "KEY2被按下\n" );
/* 触发一个事件2 */
xEventGroupSetBits(Event_Handle,KEY2_EVENT);
}
vTaskDelay(20); //每20ms扫描一次
}
}
/***********************************************************************
* @ 函数名 : BSP_Init
* @ 功能说明: 板级外设初始化,所有板子上的初始化均可放在这个函数里面
* @ 参数 :
* @ 返回值 : 无
*********************************************************************/
static void BSP_Init(void)
{
/*
* STM32中断优先级分组为4,即4bit都用来表示抢占优先级,范围为:0~15
* 优先级分组只需要分组一次即可,以后如果有其他的任务需要用到中断,
* 都统一用这个优先级分组,千万不要再分组,切忌。
*/
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 );
/* LED 初始化 */
LED_GPIO_Config();
/* 串口初始化 */
Debug_USART_Config();
/* 按键初始化 */
Key_GPIO_Config();
}
/********************************END OF FILE****************************/
13、定时器
13.1基本概念
FreeRTOS操作系统提供软件定时器功能,软件定时器的使用相当于扩展了定时器的数量,允许创建更多的定时业务。FreeRTOS软件定时器功能上支持:
裁剪:能通过宏关闭软件定时器功能。
软件定时器创建。
软件定时器启动。
软件定时器停止。
软件定时器复位。
软件定时器删除。
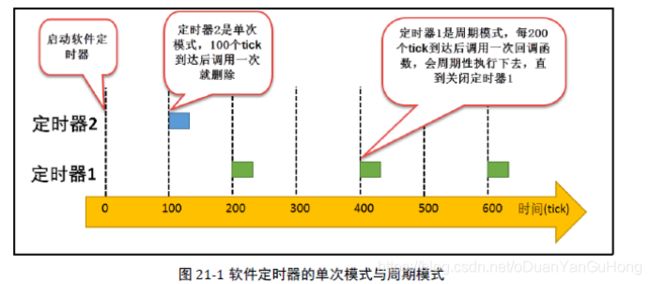
单次模式:当用户创建了定时器并启动了定时器后,定时时间到了,只执行一次回调函数之后就将该定时器删除,不再重新执行。
周期模式:这个定时器会按照设置的定时时间循环执行回调函数,直到用户将定时器删除,具体见图 21-1。
13.2 运用场景
在很多应用中,我们需要一些定时器任务,硬件定时器受硬件的限制,数量上不足以满足用户的实际需求,无法提供更多的定时器,那么可以采用软件定时器来完成,由软件定时器代替硬件定时器任务。但需要注意的是软件定时器的精度是无法和硬件定时器相比的,因为在软件定时器的定时过程中是极有可能被其它中断所打断,因为软件定时器的执行上下文环境是任务。所以,软件定时器更适用于对时间精度要求不高的任务,一些辅助型的任务。 软件定时器的所定时数值必须是这个节拍周期的整数倍,例如节拍周期是10ms,那么上层软件定时器定时数值只能是10ms,20ms,100ms等,而不能取值为15ms。
13.3 运作机制
软件定时器是可选的系统资源,在创建定时器的时候会分配一块内存空间。
使用软件定时器时候要注意以下几点:
软件定时器的回调函数中应快进快出,绝对不允许使用任何可能引软件定时器起任务挂起或者阻塞的API接口,在回调函数中也绝对不允许出现死循环。
软件定时器使用了系统的一个队列和一个任务资源,软件定时器任务的优先级默认为configTIMER_TASK_PRIORITY,为了更好响应,该优先级应设置为所有任务中最高的优先级。
创建单次软件定时器,该定时器超时执行完回调函数后,系统会自动删除该软件定时器,并回收资源。
定时器任务的堆栈大小默认为configTIMER_TASK_STACK_DEPTH个字节。
xTimerCreate()用于创建一个软件定时器,并返回一个句柄。要想使用该函数函数必须在头文件FreeRTOSConfig.h中把宏
configUSE_TIMERS
configSUPPORT_DYNAMIC_ALLOCATION 均定义为1(configSUPPORT_DYNAMIC_ALLOCATION在FreeRTOS.h中默认定义为1),并且需要把FreeRTOS/source/times.c 这个C文件添加到工程中。
13.4 创建过程
整个创建过程:
vTaskStartScheduler();–>xTimerCreateTimerTask();–>xTimerCreate();
static void prvTimerTask( void *pvParameters )
{
TickType_t xNextExpireTime;
BaseType_t xListWasEmpty;
/* Just to avoid compiler warnings. */
( void ) pvParameters;
#if( configUSE_DAEMON_TASK_STARTUP_HOOK == 1 )
{
extern void vApplicationDaemonTaskStartupHook( void );
/* Allow the application writer to execute some code in the context of
this task at the point the task starts executing. This is useful if the
application includes initialisation code that would benefit from
executing after the scheduler has been started. */
vApplicationDaemonTaskStartupHook();
}
#endif /* configUSE_DAEMON_TASK_STARTUP_HOOK */
for( ;; )
{
/* Query the timers list to see if it contains any timers, and if so,
obtain the time at which the next timer will expire. */
/* 获取下一个要到期的软件定时器的时间 */
xNextExpireTime = prvGetNextExpireTime( &xListWasEmpty );
/* If a timer has expired, process it. Otherwise, block this task
until either a timer does expire, or a command is received. */
/* 处理定时器或者将任务阻塞到下一个到期的软件定时器时间 */
prvProcessTimerOrBlockTask( xNextExpireTime, xListWasEmpty );
/* Empty the command queue. */
/* 读取“定时器命令队列”,处理相应命令 */
prvProcessReceivedCommands();
}
}
13.5 软件定时器相关函数
13.5.1xTimerCreate();
pdMS_TO_TICKS();可以把时间单位从ms转换为系统节拍周期
13.5.2xTimerlsTimerActive();
13.5.3xTimerStart();
13.5.4xTimerStop();
13.5.5xTimerChangePeriod();
13.5.6xTimerDelete();
13.5.7xTimerReset();
13.5.8xTimerStartFromISR();
13.5.9xTimerStopFromISR();
13.5.10xTimerChangePeriodFromISR();
13.5.11xTimerResetFromISR();
13.5.12xTimerGetTimerID();
13.5.13xTimerGetTimerDaemonTaskHandle();
13.6 软件定时器举例
/**
*********************************************************************
* @file main.c
* @author fire
* @version V1.0
* @date 2018-xx-xx
* @brief FreeRTOS V9.0.0 + STM32 软件定时器
*/
/*
*************************************************************************
* 包含的头文件
*************************************************************************
*/
/* FreeRTOS头文件 */
#include "FreeRTOS.h"
#include "task.h"
#include "event_groups.h"
/* 开发板硬件bsp头文件 */
#include "bsp_led.h"
#include "bsp_debug_usart.h"
#include "bsp_key.h"
/**************************** 任务句柄 ********************************/
/*
* 任务句柄是一个指针,用于指向一个任务,当任务创建好之后,它就具有了一个任务句柄
* 以后我们要想操作这个任务都需要通过这个任务句柄,如果是自身的任务操作自己,那么
* 这个句柄可以为NULL。
*/
static TaskHandle_t AppTaskCreate_Handle = NULL;/* 创建任务句柄 */
/********************************** 内核对象句柄 *********************************/
/*
* 信号量,消息队列,事件标志组,软件定时器这些都属于内核的对象,要想使用这些内核
* 对象,必须先创建,创建成功之后会返回一个相应的句柄。实际上就是一个指针,后续我
* 们就可以通过这个句柄操作这些内核对象。
*
* 内核对象说白了就是一种全局的数据结构,通过这些数据结构我们可以实现任务间的通信,
* 任务间的事件同步等各种功能。至于这些功能的实现我们是通过调用这些内核对象的函数
* 来完成的
*
*/
static TimerHandle_t Swtmr1_Handle =NULL; /* 软件定时器句柄 */
static TimerHandle_t Swtmr2_Handle =NULL; /* 软件定时器句柄 */
/******************************* 全局变量声明 ************************************/
/*
* 当我们在写应用程序的时候,可能需要用到一些全局变量。
*/
static uint32_t TmrCb_Count1 = 0; /* 记录软件定时器1回调函数执行次数 */
static uint32_t TmrCb_Count2 = 0; /* 记录软件定时器2回调函数执行次数 */
/******************************* 宏定义 ************************************/
/*
* 当我们在写应用程序的时候,可能需要用到一些宏定义。
*/
/*
*************************************************************************
* 函数声明
*************************************************************************
*/
static void AppTaskCreate(void);/* 用于创建任务 */
static void Swtmr1_Callback(void* parameter);
static void Swtmr2_Callback(void* parameter);
static void BSP_Init(void);/* 用于初始化板载相关资源 */
/*****************************************************************
* @brief 主函数
* @param 无
* @retval 无
* @note 第一步:开发板硬件初始化
第二步:创建APP应用任务
第三步:启动FreeRTOS,开始多任务调度
****************************************************************/
int main(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
/* 开发板硬件初始化 */
BSP_Init();
printf("这是一个[野火]-STM32全系列开发板-FreeRTOS软件定时器实验!\n");
/* 创建AppTaskCreate任务 */
xReturn = xTaskCreate((TaskFunction_t )AppTaskCreate, /* 任务入口函数 */
(const char* )"AppTaskCreate",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )1, /* 任务的优先级 */
(TaskHandle_t* )&AppTaskCreate_Handle);/* 任务控制块指针 */
/* 启动任务调度 */
if(pdPASS == xReturn)
vTaskStartScheduler(); /* 启动任务,开启调度 */
else
return -1;
while(1); /* 正常不会执行到这里 */
}
/***********************************************************************
* @ 函数名 : AppTaskCreate
* @ 功能说明: 为了方便管理,所有的任务创建函数都放在这个函数里面
* @ 参数 : 无
* @ 返回值 : 无
**********************************************************************/
static void AppTaskCreate(void)
{
taskENTER_CRITICAL(); //进入临界区
/************************************************************************************
* 创建软件周期定时器
* 函数原型
* TimerHandle_t xTimerCreate( const char * const pcTimerName,
const TickType_t xTimerPeriodInTicks,
const UBaseType_t uxAutoReload,
void * const pvTimerID,
TimerCallbackFunction_t pxCallbackFunction )
* @uxAutoReload : pdTRUE为周期模式,pdFALS为单次模式
* 单次定时器,周期(1000个时钟节拍),周期模式
*************************************************************************************/
Swtmr1_Handle=xTimerCreate((const char* )"AutoReloadTimer",
(TickType_t )1000,/* 定时器周期 1000(tick) */
(UBaseType_t )pdTRUE,/* 周期模式 */
(void* )1,/* 为每个计时器分配一个索引的唯一ID */
(TimerCallbackFunction_t)Swtmr1_Callback);
if(Swtmr1_Handle != NULL)
{
/***********************************************************************************
* xTicksToWait:如果在调用xTimerStart()时队列已满,则以tick为单位指定调用任务应保持
* 在Blocked(阻塞)状态以等待start命令成功发送到timer命令队列的时间。
* 如果在启动调度程序之前调用xTimerStart(),则忽略xTicksToWait。在这里设置等待时间为0.
**********************************************************************************/
xTimerStart(Swtmr1_Handle,0); //开启周期定时器
}
/************************************************************************************
* 创建软件周期定时器
* 函数原型
* TimerHandle_t xTimerCreate( const char * const pcTimerName,
const TickType_t xTimerPeriodInTicks,
const UBaseType_t uxAutoReload,
void * const pvTimerID,
TimerCallbackFunction_t pxCallbackFunction )
* @uxAutoReload : pdTRUE为周期模式,pdFALS为单次模式
* 单次定时器,周期(5000个时钟节拍),单次模式
*************************************************************************************/
Swtmr2_Handle=xTimerCreate((const char* )"OneShotTimer",
(TickType_t )5000,/* 定时器周期 5000(tick) */
(UBaseType_t )pdFALSE,/* 单次模式 */
(void* )2,/* 为每个计时器分配一个索引的唯一ID */
(TimerCallbackFunction_t)Swtmr2_Callback);
if(Swtmr2_Handle != NULL)
{
/***********************************************************************************
* xTicksToWait:如果在调用xTimerStart()时队列已满,则以tick为单位指定调用任务应保持
* 在Blocked(阻塞)状态以等待start命令成功发送到timer命令队列的时间。
* 如果在启动调度程序之前调用xTimerStart(),则忽略xTicksToWait。在这里设置等待时间为0.
**********************************************************************************/
xTimerStart(Swtmr2_Handle,0); //开启周期定时器
}
vTaskDelete(AppTaskCreate_Handle); //删除AppTaskCreate任务
taskEXIT_CRITICAL(); //退出临界区
}
/***********************************************************************
* @ 函数名 : Swtmr1_Callback
* @ 功能说明: 软件定时器1 回调函数,打印回调函数信息&当前系统时间
* 软件定时器请不要调用阻塞函数,也不要进行死循环,应快进快出
* @ 参数 : 无
* @ 返回值 : 无
**********************************************************************/
static void Swtmr1_Callback(void* parameter)
{
TickType_t tick_num1;
TmrCb_Count1++; /* 每回调一次加一 */
tick_num1 = xTaskGetTickCount(); /* 获取滴答定时器的计数值 */
LED1_TOGGLE;
printf("Swtmr1_Callback函数执行 %d 次\n", TmrCb_Count1);
printf("滴答定时器数值=%d\n", tick_num1);
}
/***********************************************************************
* @ 函数名 : Swtmr2_Callback
* @ 功能说明: 软件定时器2 回调函数,打印回调函数信息&当前系统时间
* 软件定时器请不要调用阻塞函数,也不要进行死循环,应快进快出
* @ 参数 : 无
* @ 返回值 : 无
**********************************************************************/
static void Swtmr2_Callback(void* parameter)
{
TickType_t tick_num2;
TmrCb_Count2++; /* 每回调一次加一 */
tick_num2 = xTaskGetTickCount(); /* 获取滴答定时器的计数值 */
printf("Swtmr2_Callback函数执行 %d 次\n", TmrCb_Count2);
printf("滴答定时器数值=%d\n", tick_num2);
}
/***********************************************************************
* @ 函数名 : BSP_Init
* @ 功能说明: 板级外设初始化,所有板子上的初始化均可放在这个函数里面
* @ 参数 :
* @ 返回值 : 无
*********************************************************************/
static void BSP_Init(void)
{
/*
* STM32中断优先级分组为4,即4bit都用来表示抢占优先级,范围为:0~15
* 优先级分组只需要分组一次即可,以后如果有其他的任务需要用到中断,
* 都统一用这个优先级分组,千万不要再分组,切忌。
*/
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 );
/* LED 初始化 */
LED_GPIO_Config();
/* 串口初始化 */
Debug_USART_Config();
/* 按键初始化 */
Key_GPIO_Config();
}
/********************************END OF FILE****************************/
14、任务通知
14.1 任务通知的基本概念
FreeRTOS 从V8.2.0版本开始提供任务通知这个功能,每个任务都有一个32位的通知值。
按照 FreeRTOS 官方的说法,使用任务通知比通过信号量等 ICP 通信方式解除阻塞的任务要快 45%,并且更加省 RAM 内存空间(使用 GCC 编译器,-o2 优化级别),任务通知的使用无需创建队列。
FreeRTOS 提供以下几种方式发送通知给任务 :
发送通知给任务, 如果有通知未读,不覆盖通知值。
发送通知给任务,直接覆盖通知值。
发送通知给任务,设置通知值的一个或者多个位 ,可以当做事件组来使用。
发送通知给任务,递增通知值,可以当做计数信号量使用。
通过对以上任务通知方式的合理使用,可以在一定场合下替代 FreeRTOS 的信号量, 队列、事件组等。 当然,凡是都有利弊,不然的话 FreeRTOS 还要内核的 IPC 通信机制干嘛,消息通知 虽然处理更快,RAM 开销更小,但也有以下限制 :
只能有一个任务接收通知消息,因为必须指定接收通知的任务。
只有等待通知的任务可以被阻塞,发送通知的任务,在任何情况下都不会因为发 送失败而进入阻塞态。
这就是跟队列、信号量、事件的区别。
任务通知,由于任务通知的数据结构包含在任务控制块中,只要任务存在,任务通知数据结构就已经创建完毕,可以直接使用,所以使用的时候很是方便。任务通知属于任务独属的,私有的。 具体见下面任务控制块定义:
typedef struct tskTaskControlBlock
{
volatile StackType_t *pxTopOfStack; /*< Points to the location of the last item placed on the tasks stack. THIS MUST BE THE FIRST MEMBER OF THE TCB STRUCT. */
#if ( portUSING_MPU_WRAPPERS == 1 )
xMPU_SETTINGS xMPUSettings; /*< The MPU settings are defined as part of the port layer. THIS MUST BE THE SECOND MEMBER OF THE TCB STRUCT. */
#endif
ListItem_t xStateListItem; /*< The list that the state list item of a task is reference from denotes the state of that task (Ready, Blocked, Suspended ). */
ListItem_t xEventListItem; /*< Used to reference a task from an event list. */
UBaseType_t uxPriority; /*< The priority of the task. 0 is the lowest priority. */
StackType_t *pxStack; /*< Points to the start of the stack. */
char pcTaskName[ configMAX_TASK_NAME_LEN ];/*< Descriptive name given to the task when created. Facilitates debugging only. */ /*lint !e971 Unqualified char types are allowed for strings and single characters only. */
#if ( portSTACK_GROWTH > 0 )
StackType_t *pxEndOfStack; /*< Points to the end of the stack on architectures where the stack grows up from low memory. */
#endif
#if ( portCRITICAL_NESTING_IN_TCB == 1 )
UBaseType_t uxCriticalNesting; /*< Holds the critical section nesting depth for ports that do not maintain their own count in the port layer. */
#endif
#if ( configUSE_TRACE_FACILITY == 1 )
UBaseType_t uxTCBNumber; /*< Stores a number that increments each time a TCB is created. It allows debuggers to determine when a task has been deleted and then recreated. */
UBaseType_t uxTaskNumber; /*< Stores a number specifically for use by third party trace code. */
#endif
#if ( configUSE_MUTEXES == 1 )
UBaseType_t uxBasePriority; /*< The priority last assigned to the task - used by the priority inheritance mechanism. */
UBaseType_t uxMutexesHeld;
#endif
#if ( configUSE_APPLICATION_TASK_TAG == 1 )
TaskHookFunction_t pxTaskTag;
#endif
#if( configNUM_THREAD_LOCAL_STORAGE_POINTERS > 0 )
void *pvThreadLocalStoragePointers[ configNUM_THREAD_LOCAL_STORAGE_POINTERS ];
#endif
#if( configGENERATE_RUN_TIME_STATS == 1 )
uint32_t ulRunTimeCounter; /*< Stores the amount of time the task has spent in the Running state. */
#endif
#if ( configUSE_NEWLIB_REENTRANT == 1 )
/* Allocate a Newlib reent structure that is specific to this task.
Note Newlib support has been included by popular demand, but is not
used by the FreeRTOS maintainers themselves. FreeRTOS is not
responsible for resulting newlib operation. User must be familiar with
newlib and must provide system-wide implementations of the necessary
stubs. Be warned that (at the time of writing) the current newlib design
implements a system-wide malloc() that must be provided with locks. */
struct _reent xNewLib_reent;
#endif
#if( configUSE_TASK_NOTIFICATIONS == 1 )
volatile uint32_t ulNotifiedValue;
volatile uint8_t ucNotifyState;
#endif
/* See the comments above the definition of
tskSTATIC_AND_DYNAMIC_ALLOCATION_POSSIBLE. */
#if( tskSTATIC_AND_DYNAMIC_ALLOCATION_POSSIBLE != 0 )
uint8_t ucStaticallyAllocated; /*< Set to pdTRUE if the task is a statically allocated to ensure no attempt is made to free the memory. */
#endif
#if( INCLUDE_xTaskAbortDelay == 1 )
uint8_t ucDelayAborted;
#endif
} tskTCB;
14.2 任务通知函数

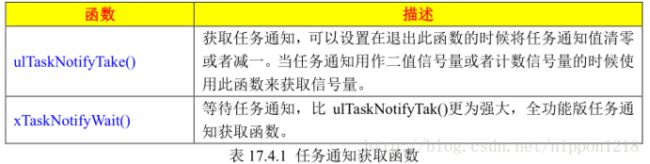
14.2.1 xTaskNotify()
1 、函数 xTaskNotify()
此函数用于发送任务通知,此函数发送任务通知的时候带有通知值,此函数是个宏,真正执行的函数 xTaskGenericNotify(),函数原型如下:
BaseType_t xTaskNotify( TaskHandle_t xTaskToNotify,
uint32_t ulValue,
eNotifyAction eAction )
参数:
xTaskToNotify : 任务句柄,指定任务通知是发送给哪个任务的。
ulValue : 任务通知值。
eAction : 任务通知更新的方法,eNotifyAction 是个枚举类型,在文件 task.h 中有如下
定义:
typedef enum
{
eNoAction = 0,
eSetBits, //更新指定的 bit
eIncrement, //通知值加一
eSetValueWithOverwrite, //覆写的方式更新通知值
eSetValueWithoutOverwrite //不覆写通知值
} eNotifyAction;
此参数可以选择枚举类型中的任意一个,不同的应用环境其选择也不同。
返回值:
pdFAIL: 当参数 eAction 设置为 eSetValueWithoutOverwrite 的时候,如果任务通知值没有更新成功就返回 pdFAIL。
pdPASS: eAction 设置为其他选项的时候统一返回 pdPASS。
原函数如下:
BaseType_t xTaskGenericNotify( TaskHandle_t xTaskToNotify, uint32_t ulValue, eNotifyAction eAction, uint32_t *pulPreviousNotificationValue )
{
TCB_t * pxTCB;
BaseType_t xReturn = pdPASS;
uint8_t ucOriginalNotifyState;
configASSERT( xTaskToNotify );
pxTCB = ( TCB_t * ) xTaskToNotify;
taskENTER_CRITICAL();
{
if( pulPreviousNotificationValue != NULL )
{
*pulPreviousNotificationValue = pxTCB->ulNotifiedValue;
}
ucOriginalNotifyState = pxTCB->ucNotifyState;
pxTCB->ucNotifyState = taskNOTIFICATION_RECEIVED;
switch( eAction )
{
/*通知值按位或上ulValue。
使用这种方法可以某些场景下代替事件组,但执行速度更快。*/
case eSetBits :
pxTCB->ulNotifiedValue |= ulValue;
break;
/* 被通知任务的通知值增加1,这种发送通知方式,参数ulValue未使用 */
case eIncrement :
( pxTCB->ulNotifiedValue )++;
break;
/* 将被通知任务的通知值设置为ulValue。无论任务是否还有通知,
都覆盖当前任务通知值。使用这种方法,
可以在某些场景下代替xQueueoverwrite()函数,但执行速度更快。 */
case eSetValueWithOverwrite :
pxTCB->ulNotifiedValue = ulValue;
break;
/* 如果被通知任务当前没有通知,则被通知任务的通知值设置为ulValue;
在某些场景下替代长度为1的xQueuesend(),但速度更快。 */
case eSetValueWithoutOverwrite :
if( ucOriginalNotifyState != taskNOTIFICATION_RECEIVED )
{
pxTCB->ulNotifiedValue = ulValue;
}
else
{
/* The value could not be written to the task. */
xReturn = pdFAIL;
}
break;
/* 发送通知但不更新通知值,这意味着参数ulValue未使用。 */
case eNoAction:
/* The task is being notified without its notify value being
updated. */
break;
}
traceTASK_NOTIFY();
/* If the task is in the blocked state specifically to wait for a
notification then unblock it now. */
if( ucOriginalNotifyState == taskWAITING_NOTIFICATION )
{
( void ) uxListRemove( &( pxTCB->xStateListItem ) );
prvAddTaskToReadyList( pxTCB );
/* The task should not have been on an event list. */
configASSERT( listLIST_ITEM_CONTAINER( &( pxTCB->xEventListItem ) ) == NULL );
#if( configUSE_TICKLESS_IDLE != 0 )
{
/* If a task is blocked waiting for a notification then
xNextTaskUnblockTime might be set to the blocked task's time
out time. If the task is unblocked for a reason other than
a timeout xNextTaskUnblockTime is normally left unchanged,
because it will automatically get reset to a new value when
the tick count equals xNextTaskUnblockTime. However if
tickless idling is used it might be more important to enter
sleep mode at the earliest possible time - so reset
xNextTaskUnblockTime here to ensure it is updated at the
earliest possible time. */
prvResetNextTaskUnblockTime();
}
#endif
if( pxTCB->uxPriority > pxCurrentTCB->uxPriority )
{
/* The notified task has a priority above the currently
executing task so a yield is required. */
taskYIELD_IF_USING_PREEMPTION();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
taskEXIT_CRITICAL();
return xReturn;
}
14.2.3 xTaskNotifyFromISR()
此函数用于发送任务通知,是函数 xTaskNotify()的中断版本,此函数是个宏,真正执行的是函数 xTaskGenericNotifyFromISR(),此函数原型如下:
BaseType_t xTaskNotifyFromISR( TaskHandle_t xTaskToNotify,
uint32_t ulValue,
eNotifyAction eAction,
BaseType_t * pxHigherPriorityTaskWoken );
参数:
xTaskToNotify : 任务句柄,指定任务通知是发送给哪个任务的。
ulValue : 任务通知值。
eAction : 任务通知更新的方法。
pxHigherPriorityTaskWoken: 记退出此函数以后是否进行任务切换,这个变量的值函数会自动设置的,用户不用进行设置,用户只需要提供一个变量来保存这
个值就行了。当此值为 pdTRUE 的时候在退出中断服务函数之前一定要进行一次任务切换。
返回值:
pdFAIL: 当参数 eAction 设置为 eSetValueWithoutOverwrite 的时候,如果任务通知值没有更新成功就返回 pdFAIL。
pdPASS: eAction 设置为其他选项的时候统一返回 pdPASS。
14.2.4 xTaskNotifyGive()
发送任务通知,相对于函数 xTaskNotify(),此函数发送任务通知的时候不带有通知值。此函数只是将任务通知值简单的加一,此函数是个宏,真正执行的是函数 xTaskGenericNotify(),此函数原型如下:
BaseType_t xTaskNotifyGive( TaskHandle_t xTaskToNotify );
参数:
xTaskToNotify : 任务句柄,指定任务通知是发送给哪个任务的。
返回值:
pdPASS: 此函数只会返回 pdPASS。
14.2.5 vTaskNotifyGiveFromISR()
此函数为 xTaskNotifyGive()的中断版本,用在中断服务函数中,函数原型如下:
void vTaskNotifyGiveFromISR( TaskHandle_t xTaskHandle,
BaseType_t * pxHigherPriorityTaskWoken );
参数:
xTaskToNotify : 任务句柄,指定任务通知是发送给哪个任务的。
pxHigherPriorityTaskWoken: 记退出此函数以后是否进行任务切换,这个变量的值函数会自动
设置的,用户不用进行设置,用户只需要提供一个变量来保存这个值就行了。当此值为 pdTRUE 的时候在退出中断服务函数之前一定要进行一次任务切换。
返回值:
无。
14.2.6 xTaskNotifyAndQuery()
此函数和 xTaskNotify()很类似,此函数比 xTaskNotify()多一个参数,此参数用来保存更新前的通知值。此函数是个宏,真正执行的是函数 xTaskGenericNotify(),此函数原型如下:
BaseType_t xTaskNotifyAndQuery ( TaskHandle_t xTaskToNotify,
uint32_t ulValue,
eNotifyAction eAction,
uint32_t * pulPreviousNotificationValue);
参数:
xTaskToNotify : 任务句柄,指定任务通知是发送给哪个任务的。
ulValue : 任务通知值。
eAction : 任务通知更新的方法。
pulPreviousNotificationValue:用来保存更新前的任务通知值。
返回值:
pdFAIL: 当参数 eAction 设置为 eSetValueWithoutOverwrite 的时候,如果任务通知值没有更新成功就返回 pdFAIL。
pdPASS: eAction 设置为其他选项的时候统一返回 pdPASS。
14.2.7 xTaskNotifyAndQueryFromISR()
此函数为 xTaskNorityAndQuery()的中断版本,用在中断服务函数中。此函数同样为宏,真正执行的是函数 xTaskGenericNotifyFromISR(),此函数的原型如下:
BaseType_t xTaskNotifyAndQueryFromISR ( TaskHandle_t xTaskToNotify,
uint32_t ulValue,
eNotifyAction eAction,
uint32_t * pulPreviousNotificationValue,
BaseType_t * pxHigherPriorityTaskWoken );
参数:
xTaskToNotify : 任务句柄,指定任务通知是发送给哪个任务的。
ulValue : 任务通知值。
eAction : 任务通知更新的方法。
pulPreviousNotificationValue:用来保存更新前的任务通知值。
pxHigherPriorityTaskWoken: 记退出此函数以后是否进行任务切换,这个变量的值函数会自动
设置的,用户不用进行设置,用户只需要提供一个变量来保存这个值就行了。当此值为 pdTRUE 的时候在退出中断服务函数之前一定要进行一次任务切换。
返回值:
pdFAIL: 当参数 eAction 设置为 eSetValueWithoutOverwrite 的时候,如果任务通知值没有更新成功就返回 pdFAIL。
pdPASS: eAction 设置为其他选项的时候统一返回 pdPASS。
14.2.8 ulTaskNotifyTake()
此函数为获取任务通知函数,当任务通知用作二值信号量或者计数型信号量的时候可以使用此函数来获取信号量,函数原型如下:
uint32_t ulTaskNotifyTake( BaseType_t xClearCountOnExit,
TickType_t xTicksToWait );
参数:
xClearCountOnExit : 参数为 pdFALSE 的话在退出函数 ulTaskNotifyTake()的时候任务通知值减一,类似计数型信号量。当此参数为 pdTRUE 的话在退出函数的时候任务任务通知值清零,类似二值信号量。
xTickToWait: 阻塞时间。
返回值:
任何值 : 任务通知值减少或者清零之前的值。
此函数在文件 tasks.c 中有定义,代码如下:
uint32_t ulTaskNotifyTake( BaseType_t xClearCountOnExit, TickType_t xTicksToWait )
{
uint32_t ulReturn;
taskENTER_CRITICAL();
{
if( pxCurrentTCB->ulNotifiedValue == 0UL ) (1)
{
pxCurrentTCB->ucNotifyState = taskWAITING_NOTIFICATION; (2)
if( xTicksToWait > ( TickType_t ) 0 ) (3)
{
prvAddCurrentTaskToDelayedList( xTicksToWait, pdTRUE );
traceTASK_NOTIFY_TAKE_BLOCK();
portYIELD_WITHIN_API();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
taskEXIT_CRITICAL();
taskENTER_CRITICAL();
{
traceTASK_NOTIFY_TAKE();
ulReturn = pxCurrentTCB->ulNotifiedValue; (4)
if( ulReturn != 0UL ) (5)
{
if( xClearCountOnExit != pdFALSE ) (6)
{
pxCurrentTCB->ulNotifiedValue = 0UL;
}
else
{
pxCurrentTCB->ulNotifiedValue = ulReturn - 1; (7)
}
}
else
{
mtCOVERAGE_TEST_MARKER();
}
pxCurrentTCB->ucNotifyState = taskNOT_WAITING_NOTIFICATION; (8)
}
taskEXIT_CRITICAL();
return ulReturn;
}
(1)、判断任务通知值是否为 0,如果为 0 的话说明还没有接收到任务通知。
(2)、修改任务通知状态为 taskWAITING_NOTIFICATION。
(3)、如果阻塞时间不为 0 的话就将任务添加到延时列表中,并且进行一次任 务调度。
(4)、如果任务通知值不为 0 的话就先获取任务通知值。
(5)、任务通知值大于 0。
(6)、参数 xClearCountOnExit 不为 pdFALSE,那就将任务通知值清零。
(7)、如果参数 xClearCountOnExit 为 pdFALSE 的话那就将任务通知值减一。
(8)、更新任务通知状态为 taskNOT_WAITING_NOTIFICATION。
14.2.9xTaskNotifyWait()
此函数也是用来获取任务通知的,不过此函数比 ulTaskNotifyTake()更为强大,不管任务通知用作二值信号量、计数型信号量、队列和事件标志组中的哪一种,都可以使用此函数来获取任务通知。但是当任务通知用作位置信号量和计数型信号量的时候推荐使用函数ulTaskNotifyTake()。此函数原型如下:
BaseType_t xTaskNotifyWait( uint32_t ulBitsToClearOnEntry,
uint32_t ulBitsToClearOnExit,
uint32_t * pulNotificationValue,
TickType_t xTicksToWait );
参数:
ulBitsToClearOnEntry: :当没有接收到任务通知的时候将任务通知值与此参数的取反值进行按位与运算,当此参数为 0xffffffff 或者 ULONG_MAX 的时候就会将任务
通知值清零。
ulBitsToClearOnExit: :如果接收到了任务通知,在做完相应的处理退出函数之前将任务通知值与此参数的取反值进行按位与运算,当此参数为 0xffffffff 或者ULONG_MAX 的时候就会将任务通知值清零。
pulNotificationValue :此参数用来保存任务通知值。
xTickToWait: 阻塞时间。
返回值:
pdTRUE : 获取到了任务通知。
pdFALSE : 任务通知获取失败。
此函数在文件 tasks.c 中有定义,代码如下:
BaseType_t xTaskNotifyWait( uint32_t ulBitsToClearOnEntry,
uint32_t ulBitsToClearOnExit,
uint32_t * pulNotificationValue,
TickType_t xTicksToWait )
{
BaseType_t xReturn;
taskENTER_CRITICAL();
{
if( pxCurrentTCB->ucNotifyState != taskNOTIFICATION_RECEIVED ) (1)
{
pxCurrentTCB->ulNotifiedValue &= ~ulBitsToClearOnEntry; (2)
pxCurrentTCB->ucNotifyState = taskWAITING_NOTIFICATION; (3)
if( xTicksToWait > ( TickType_t ) 0 ) (4)
{
prvAddCurrentTaskToDelayedList( xTicksToWait, pdTRUE );
traceTASK_NOTIFY_WAIT_BLOCK();
portYIELD_WITHIN_API();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
taskEXIT_CRITICAL();
taskENTER_CRITICAL();
{
traceTASK_NOTIFY_WAIT();
if( pulNotificationValue != NULL ) (5)
{
*pulNotificationValue = pxCurrentTCB->ulNotifiedValue;
}
if( pxCurrentTCB->ucNotifyState == taskWAITING_NOTIFICATION ) (6)
{
xReturn = pdFALSE;
}
else
{
pxCurrentTCB->ulNotifiedValue &= ~ulBitsToClearOnExit; (7)
xReturn = pdTRUE;
}
pxCurrentTCB->ucNotifyState = taskNOT_WAITING_NOTIFICATION; (8)
}
taskEXIT_CRITICAL();
return xReturn;
}
(1)、任务同通状态不为 taskNOTIFICATION_RECEIVED。
(2)、将任务通知值与参数 ulBitsToClearOnEntry 的取反值进行按位与运算。
(3)、任务通知状态改为 taskWAITING_NOTIFICATION。
(4)、如果阻塞时间大于 0 的话就要将任务添加到延时列表中,并且进行一次任务切换。
(5)、如果任务通知状态为 taskNOTIFICATION_RECEIVED,并且参数 pulNotificationValue有效的话就保存任务通知值。
(6)、如果任务通知的状态又变为 taskWAITING_NOTIFICATION 的话就标记 xRetur 为pdFALSE。
(7)、如果任务通知的状态一直为 taskNOTIFICATION_RECEIVED 的话就将任务通知的值与参数 ulBitsToClearOnExit 的取反值进行按位与运算,并且标记 xReturn 为 pdTRUE,表示获取任务通知成功。
(8)、标记任务通知的状态为 taskNOT_WAITING_NOTIFICATION。
14.3举例
14.3.1 任务通知代替消息队列
/**
*********************************************************************
* @file main.c
* @author fire
* @version V1.0
* @date 2018-xx-xx
* @brief FreeRTOS V9.0.0 + STM32 任务通知代替消息队列
**********************************************************************
*/
/*
*************************************************************************
* 包含的头文件
*************************************************************************
*/
/* FreeRTOS头文件 */
#include "FreeRTOS.h"
#include "task.h"
/* 开发板硬件bsp头文件 */
#include "bsp_led.h"
#include "bsp_debug_usart.h"
#include "bsp_key.h"
#include "limits.h"
/**************************** 任务句柄 ********************************/
/*
* 任务句柄是一个指针,用于指向一个任务,当任务创建好之后,它就具有了一个任务句柄
* 以后我们要想操作这个任务都需要通过这个任务句柄,如果是自身的任务操作自己,那么
* 这个句柄可以为NULL。
*/
static TaskHandle_t AppTaskCreate_Handle = NULL;/* 创建任务句柄 */
static TaskHandle_t Receive1_Task_Handle = NULL;/* Receive1_Task任务句柄 */
static TaskHandle_t Receive2_Task_Handle = NULL;/* Receive2_Task任务句柄 */
static TaskHandle_t Send_Task_Handle = NULL;/* Send_Task任务句柄 */
/********************************** 内核对象句柄 *********************************/
/*
* 信号量,消息队列,事件标志组,软件定时器这些都属于内核的对象,要想使用这些内核
* 对象,必须先创建,创建成功之后会返回一个相应的句柄。实际上就是一个指针,后续我
* 们就可以通过这个句柄操作这些内核对象。
*
* 内核对象说白了就是一种全局的数据结构,通过这些数据结构我们可以实现任务间的通信,
* 任务间的事件同步等各种功能。至于这些功能的实现我们是通过调用这些内核对象的函数
* 来完成的
*
*/
/******************************* 全局变量声明 ************************************/
/*
* 当我们在写应用程序的时候,可能需要用到一些全局变量。
*/
/******************************* 宏定义 ************************************/
/*
* 当我们在写应用程序的时候,可能需要用到一些宏定义。
*/
#define USE_CHAR 0 /* 测试字符串的时候配置为 1 ,测试变量配置为 0 */
/*
*************************************************************************
* 函数声明
*************************************************************************
*/
static void AppTaskCreate(void);/* 用于创建任务 */
static void Receive1_Task(void* pvParameters);/* Receive1_Task任务实现 */
static void Receive2_Task(void* pvParameters);/* Receive2_Task任务实现 */
static void Send_Task(void* pvParameters);/* Send_Task任务实现 */
static void BSP_Init(void);/* 用于初始化板载相关资源 */
/*****************************************************************
* @brief 主函数
* @param 无
* @retval 无
* @note 第一步:开发板硬件初始化
第二步:创建APP应用任务
第三步:启动FreeRTOS,开始多任务调度
****************************************************************/
int main(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
/* 开发板硬件初始化 */
BSP_Init();
printf("这是一个[野火]-STM32全系列开发板-FreeRTOS任务通知代替消息队列实验!\n");
printf("按下KEY1或者KEY2进行任务消息通知发送 \n");
/* 创建AppTaskCreate任务 */
xReturn = xTaskCreate((TaskFunction_t )AppTaskCreate, /* 任务入口函数 */
(const char* )"AppTaskCreate",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )1, /* 任务的优先级 */
(TaskHandle_t* )&AppTaskCreate_Handle);/* 任务控制块指针 */
/* 启动任务调度 */
if(pdPASS == xReturn)
vTaskStartScheduler(); /* 启动任务,开启调度 */
else
return -1;
while(1); /* 正常不会执行到这里 */
}
/***********************************************************************
* @ 函数名 : AppTaskCreate
* @ 功能说明: 为了方便管理,所有的任务创建函数都放在这个函数里面
* @ 参数 : 无
* @ 返回值 : 无
**********************************************************************/
static void AppTaskCreate(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
taskENTER_CRITICAL(); //进入临界区
/* 创建Receive1_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )Receive1_Task, /* 任务入口函数 */
(const char* )"Receive1_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL, /* 任务入口函数参数 */
(UBaseType_t )2, /* 任务的优先级 */
(TaskHandle_t* )&Receive1_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建Receive1_Task任务成功!\r\n");
/* 创建Receive2_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )Receive2_Task, /* 任务入口函数 */
(const char* )"Receive2_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL, /* 任务入口函数参数 */
(UBaseType_t )3, /* 任务的优先级 */
(TaskHandle_t* )&Receive2_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建Receive2_Task任务成功!\r\n");
/* 创建Send_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )Send_Task, /* 任务入口函数 */
(const char* )"Send_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )4, /* 任务的优先级 */
(TaskHandle_t* )&Send_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建Send_Task任务成功!\n\n");
vTaskDelete(AppTaskCreate_Handle); //删除AppTaskCreate任务
taskEXIT_CRITICAL(); //退出临界区
}
/**********************************************************************
* @ 函数名 : Receive_Task
* @ 功能说明: Receive_Task任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void Receive1_Task(void* parameter)
{
BaseType_t xReturn = pdTRUE;/* 定义一个创建信息返回值,默认为pdPASS */
#if USE_CHAR
char *r_char;
#else
uint32_t r_num;
#endif
while (1)
{
/* BaseType_t xTaskNotifyWait(uint32_t ulBitsToClearOnEntry,
uint32_t ulBitsToClearOnExit,
uint32_t *pulNotificationValue,
TickType_t xTicksToWait );
* ulBitsToClearOnEntry:当没有接收到任务通知的时候将任务通知值与此参数的取
反值进行按位与运算,当此参数为Oxfffff或者ULONG_MAX的时候就会将任务通知值清零。
* ulBits ToClearOnExit:如果接收到了任务通知,在做完相应的处理退出函数之前将
任务通知值与此参数的取反值进行按位与运算,当此参数为0xfffff或者ULONG MAX的时候
就会将任务通知值清零。
* pulNotification Value:此参数用来保存任务通知值。
* xTick ToWait:阻塞时间。
*
* 返回值:pdTRUE:获取到了任务通知。pdFALSE:任务通知获取失败。
*/
//获取任务通知 ,没获取到则一直等待
xReturn=xTaskNotifyWait(0x0, //进入函数的时候不清除任务bit
ULONG_MAX, //退出函数的时候清除所有的bit
#if USE_CHAR
(uint32_t *)&r_char, //保存任务通知值
#else
&r_num, //保存任务通知值
#endif
portMAX_DELAY); //阻塞时间
if( pdTRUE == xReturn )
#if USE_CHAR
printf("Receive1_Task 任务通知消息为 %s \n",r_char);
#else
printf("Receive1_Task 任务通知消息为 %d \n",r_num);
#endif
LED1_TOGGLE;
}
}
/**********************************************************************
* @ 函数名 : Receive_Task
* @ 功能说明: Receive_Task任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void Receive2_Task(void* parameter)
{
BaseType_t xReturn = pdTRUE;/* 定义一个创建信息返回值,默认为pdPASS */
#if USE_CHAR
char *r_char;
#else
uint32_t r_num;
#endif
while (1)
{
/* BaseType_t xTaskNotifyWait(uint32_t ulBitsToClearOnEntry,
uint32_t ulBitsToClearOnExit,
uint32_t *pulNotificationValue,
TickType_t xTicksToWait );
* ulBitsToClearOnEntry:当没有接收到任务通知的时候将任务通知值与此参数的取
反值进行按位与运算,当此参数为Oxfffff或者ULONG_MAX的时候就会将任务通知值清零。
* ulBits ToClearOnExit:如果接收到了任务通知,在做完相应的处理退出函数之前将
任务通知值与此参数的取反值进行按位与运算,当此参数为0xfffff或者ULONG MAX的时候
就会将任务通知值清零。
* pulNotification Value:此参数用来保存任务通知值。
* xTick ToWait:阻塞时间。
*
* 返回值:pdTRUE:获取到了任务通知。pdFALSE:任务通知获取失败。
*/
//获取任务通知 ,没获取到则一直等待
xReturn=xTaskNotifyWait(0x0, //进入函数的时候不清除任务bit
ULONG_MAX, //退出函数的时候清除所有的bit
#if USE_CHAR
(uint32_t *)&r_char, //保存任务通知值
#else
&r_num, //保存任务通知值
#endif
portMAX_DELAY); //阻塞时间
if( pdTRUE == xReturn )
#if USE_CHAR
printf("Receive2_Task 任务通知消息为 %s \n",r_char);
#else
printf("Receive2_Task 任务通知消息为 %d \n",r_num);
#endif
LED2_TOGGLE;
}
}
/**********************************************************************
* @ 函数名 : Send_Task
* @ 功能说明: Send_Task任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void Send_Task(void* parameter)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
#if USE_CHAR
char test_str1[] = "this is a mail test 1";/* 邮箱消息test1 */
char test_str2[] = "this is a mail test 2";/* 邮箱消息test2 */
#else
uint32_t send1 = 1;
uint32_t send2 = 2;
#endif
while (1)
{
/* KEY1 被按下 */
if( Key_Scan(KEY1_GPIO_PORT,KEY1_PIN) == KEY_ON )
{
/* 原型:BaseType_t xTaskNotify( TaskHandle_t xTaskToNotify,
uint32_t ulValue,
eNotifyAction eAction );
* eNoAction = 0,通知任务而不更新其通知值。
* eSetBits, 设置任务通知值中的位。
* eIncrement, 增加任务的通知值。
* eSetvaluewithoverwrite,覆盖当前通知
* eSetValueWithoutoverwrite 不覆盖当前通知
*
* pdFAIL:当参数eAction设置为eSetValueWithoutOverwrite的时候,
* 如果任务通知值没有更新成功就返回pdFAIL。
* pdPASS: eAction 设置为其他选项的时候统一返回pdPASS。
*/
xReturn = xTaskNotify( Receive1_Task_Handle, /*任务句柄*/
#if USE_CHAR
(uint32_t)&test_str1, /* 发送的数据,最大为4字节 */
#else
send1, /* 发送的数据,最大为4字节 */
#endif
eSetValueWithOverwrite );/*覆盖当前通知*/
if( xReturn == pdPASS )
printf("Receive1_Task_Handle 任务通知消息发送成功!\r\n");
}
/* KEY2 被按下 */
if( Key_Scan(KEY2_GPIO_PORT,KEY2_PIN) == KEY_ON )
{
xReturn = xTaskNotify( Receive2_Task_Handle, /*任务句柄*/
#if USE_CHAR
(uint32_t)&test_str2, /* 发送的数据,最大为4字节 */
#else
send2, /* 发送的数据,最大为4字节 */
#endif
eSetValueWithOverwrite );/*覆盖当前通知*/
/* 此函数只会返回pdPASS */
if( xReturn == pdPASS )
printf("Receive2_Task_Handle 任务通知消息发送成功!\r\n");
}
vTaskDelay(20);
}
}
/***********************************************************************
* @ 函数名 : BSP_Init
* @ 功能说明: 板级外设初始化,所有板子上的初始化均可放在这个函数里面
* @ 参数 :
* @ 返回值 : 无
*********************************************************************/
static void BSP_Init(void)
{
/*
* STM32中断优先级分组为4,即4bit都用来表示抢占优先级,范围为:0~15
* 优先级分组只需要分组一次即可,以后如果有其他的任务需要用到中断,
* 都统一用这个优先级分组,千万不要再分组,切忌。
*/
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 );
/* LED 初始化 */
LED_GPIO_Config();
/* 串口初始化 */
Debug_USART_Config();
/* 按键初始化 */
Key_GPIO_Config();
}
/********************************END OF FILE****************************/
14.3.2 任务通知代二值信号量
/**
*********************************************************************
* @file main.c
* @author fire
* @version V1.0
* @date 2018-xx-xx
* @brief FreeRTOS V9.0.0 + STM32 任务通知代替二值信号量
*********************************************************************
*/
/*
*************************************************************************
* 包含的头文件
*************************************************************************
*/
/* FreeRTOS头文件 */
#include "FreeRTOS.h"
#include "task.h"
/* 开发板硬件bsp头文件 */
#include "bsp_led.h"
#include "bsp_debug_usart.h"
#include "bsp_key.h"
/**************************** 任务句柄 ********************************/
/*
* 任务句柄是一个指针,用于指向一个任务,当任务创建好之后,它就具有了一个任务句柄
* 以后我们要想操作这个任务都需要通过这个任务句柄,如果是自身的任务操作自己,那么
* 这个句柄可以为NULL。
*/
static TaskHandle_t AppTaskCreate_Handle = NULL;/* 创建任务句柄 */
static TaskHandle_t Receive1_Task_Handle = NULL;/* Receive1_Task任务句柄 */
static TaskHandle_t Receive2_Task_Handle = NULL;/* Receive2_Task任务句柄 */
static TaskHandle_t Send_Task_Handle = NULL;/* Send_Task任务句柄 */
/********************************** 内核对象句柄 *********************************/
/*
* 信号量,消息队列,事件标志组,软件定时器这些都属于内核的对象,要想使用这些内核
* 对象,必须先创建,创建成功之后会返回一个相应的句柄。实际上就是一个指针,后续我
* 们就可以通过这个句柄操作这些内核对象。
*
* 内核对象说白了就是一种全局的数据结构,通过这些数据结构我们可以实现任务间的通信,
* 任务间的事件同步等各种功能。至于这些功能的实现我们是通过调用这些内核对象的函数
* 来完成的
*
*/
/******************************* 全局变量声明 ************************************/
/*
* 当我们在写应用程序的时候,可能需要用到一些全局变量。
*/
/******************************* 宏定义 ************************************/
/*
* 当我们在写应用程序的时候,可能需要用到一些宏定义。
*/
/*
*************************************************************************
* 函数声明
*************************************************************************
*/
static void AppTaskCreate(void);/* 用于创建任务 */
static void Receive1_Task(void* pvParameters);/* Receive1_Task任务实现 */
static void Receive2_Task(void* pvParameters);/* Receive2_Task任务实现 */
static void Send_Task(void* pvParameters);/* Send_Task任务实现 */
static void BSP_Init(void);/* 用于初始化板载相关资源 */
/*****************************************************************
* @brief 主函数
* @param 无
* @retval 无
* @note 第一步:开发板硬件初始化
第二步:创建APP应用任务
第三步:启动FreeRTOS,开始多任务调度
****************************************************************/
int main(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
/* 开发板硬件初始化 */
BSP_Init();
printf("这是一个[野火]-STM32全系列开发板-FreeRTOS任务通知代替二值信号量实验!\n");
printf("按下KEY1或者KEY2进行任务与任务间的同步\n");
/* 创建AppTaskCreate任务 */
xReturn = xTaskCreate((TaskFunction_t )AppTaskCreate, /* 任务入口函数 */
(const char* )"AppTaskCreate",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )1, /* 任务的优先级 */
(TaskHandle_t* )&AppTaskCreate_Handle);/* 任务控制块指针 */
/* 启动任务调度 */
if(pdPASS == xReturn)
vTaskStartScheduler(); /* 启动任务,开启调度 */
else
return -1;
while(1); /* 正常不会执行到这里 */
}
/***********************************************************************
* @ 函数名 : AppTaskCreate
* @ 功能说明: 为了方便管理,所有的任务创建函数都放在这个函数里面
* @ 参数 : 无
* @ 返回值 : 无
**********************************************************************/
static void AppTaskCreate(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
taskENTER_CRITICAL(); //进入临界区
/* 创建Receive1_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )Receive1_Task, /* 任务入口函数 */
(const char* )"Receive1_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL, /* 任务入口函数参数 */
(UBaseType_t )2, /* 任务的优先级 */
(TaskHandle_t* )&Receive1_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建Receive1_Task任务成功!\r\n");
/* 创建Receive2_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )Receive2_Task, /* 任务入口函数 */
(const char* )"Receive2_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL, /* 任务入口函数参数 */
(UBaseType_t )3, /* 任务的优先级 */
(TaskHandle_t* )&Receive2_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建Receive2_Task任务成功!\r\n");
/* 创建Send_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )Send_Task, /* 任务入口函数 */
(const char* )"Send_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )4, /* 任务的优先级 */
(TaskHandle_t* )&Send_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建Send_Task任务成功!\n\n");
vTaskDelete(AppTaskCreate_Handle); //删除AppTaskCreate任务
taskEXIT_CRITICAL(); //退出临界区
}
/**********************************************************************
* @ 函数名 : Receive_Task
* @ 功能说明: Receive_Task任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void Receive1_Task(void* parameter)
{
while (1)
{
/* uint32_t ulTaskNotifyTake( BaseType_t xClearCountOnExit, TickType_t xTicksToWait );
* xClearCountOnExit:pdTRUE 在退出函数的时候任务任务通知值清零,类似二值信号量
* pdFALSE 在退出函数ulTaskNotifyTakeO的时候任务通知值减一,类似计数型信号量。
*/
//获取任务通知 ,没获取到则一直等待
ulTaskNotifyTake(pdTRUE,portMAX_DELAY);
printf("Receive1_Task 任务通知获取成功!\n\n");
LED1_TOGGLE;
}
}
/**********************************************************************
* @ 函数名 : Receive_Task
* @ 功能说明: Receive_Task任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void Receive2_Task(void* parameter)
{
while (1)
{
/* uint32_t ulTaskNotifyTake( BaseType_t xClearCountOnExit, TickType_t xTicksToWait );
* xClearCountOnExit:pdTRUE 在退出函数的时候任务任务通知值清零,类似二值信号量
* pdFALSE 在退出函数ulTaskNotifyTakeO的时候任务通知值减一,类似计数型信号量。
*/
//获取任务通知 ,没获取到则一直等待
ulTaskNotifyTake(pdTRUE,portMAX_DELAY);
printf("Receive2_Task 任务通知获取成功!\n\n");
LED2_TOGGLE;
}
}
/**********************************************************************
* @ 函数名 : Send_Task
* @ 功能说明: Send_Task任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void Send_Task(void* parameter)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
while (1)
{
/* KEY1 被按下 */
if( Key_Scan(KEY1_GPIO_PORT,KEY1_PIN) == KEY_ON )
{
/* 原型:BaseType_t xTaskNotifyGive( TaskHandle_t xTaskToNotify ); */
xReturn = xTaskNotifyGive(Receive1_Task_Handle);
/* 此函数只会返回pdPASS */
if( xReturn == pdTRUE )
printf("Receive1_Task_Handle 任务通知发送成功!\r\n");
}
/* KEY2 被按下 */
if( Key_Scan(KEY2_GPIO_PORT,KEY2_PIN) == KEY_ON )
{
xReturn = xTaskNotifyGive(Receive2_Task_Handle);
/* 此函数只会返回pdPASS */
if( xReturn == pdPASS )
printf("Receive2_Task_Handle 任务通知发送成功!\r\n");
}
vTaskDelay(20);
}
}
/***********************************************************************
* @ 函数名 : BSP_Init
* @ 功能说明: 板级外设初始化,所有板子上的初始化均可放在这个函数里面
* @ 参数 :
* @ 返回值 : 无
*********************************************************************/
static void BSP_Init(void)
{
/*
* STM32中断优先级分组为4,即4bit都用来表示抢占优先级,范围为:0~15
* 优先级分组只需要分组一次即可,以后如果有其他的任务需要用到中断,
* 都统一用这个优先级分组,千万不要再分组,切忌。
*/
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 );
/* LED 初始化 */
LED_GPIO_Config();
/* 串口初始化 */
Debug_USART_Config();
/* 按键初始化 */
Key_GPIO_Config();
}
/********************************END OF FILE****************************/
14.3.3 任务通知代替计数信号量
/**
*********************************************************************
* @file main.c
* @author fire
* @version V1.0
* @date 2018-xx-xx
* @brief FreeRTOS V9.0.0 + STM32 任务通知代替计数信号量
**********************************************************************
*/
/*
*************************************************************************
* 包含的头文件
*************************************************************************
*/
/* FreeRTOS头文件 */
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
#include "semphr.h"
/* 开发板硬件bsp头文件 */
#include "bsp_led.h"
#include "bsp_debug_usart.h"
#include "bsp_key.h"
/**************************** 任务句柄 ********************************/
/*
* 任务句柄是一个指针,用于指向一个任务,当任务创建好之后,它就具有了一个任务句柄
* 以后我们要想操作这个任务都需要通过这个任务句柄,如果是自身的任务操作自己,那么
* 这个句柄可以为NULL。
*/
static TaskHandle_t AppTaskCreate_Handle = NULL;/* 创建任务句柄 */
static TaskHandle_t Take_Task_Handle = NULL;/* Take_Task任务句柄 */
static TaskHandle_t Give_Task_Handle = NULL;/* Give_Task任务句柄 */
/********************************** 内核对象句柄 *********************************/
/*
* 信号量,消息队列,事件标志组,软件定时器这些都属于内核的对象,要想使用这些内核
* 对象,必须先创建,创建成功之后会返回一个相应的句柄。实际上就是一个指针,后续我
* 们就可以通过这个句柄操作这些内核对象。
*
* 内核对象说白了就是一种全局的数据结构,通过这些数据结构我们可以实现任务间的通信,
* 任务间的事件同步等各种功能。至于这些功能的实现我们是通过调用这些内核对象的函数
* 来完成的
*
*/
SemaphoreHandle_t CountSem_Handle =NULL;
/******************************* 全局变量声明 ************************************/
/*
* 当我们在写应用程序的时候,可能需要用到一些全局变量。
*/
/******************************* 宏定义 ************************************/
/*
* 当我们在写应用程序的时候,可能需要用到一些宏定义。
*/
/*
*************************************************************************
* 函数声明
*************************************************************************
*/
static void AppTaskCreate(void);/* 用于创建任务 */
static void Take_Task(void* pvParameters);/* Take_Task任务实现 */
static void Give_Task(void* pvParameters);/* Give_Task任务实现 */
static void BSP_Init(void);/* 用于初始化板载相关资源 */
/*****************************************************************
* @brief 主函数
* @param 无
* @retval 无
* @note 第一步:开发板硬件初始化
第二步:创建APP应用任务
第三步:启动FreeRTOS,开始多任务调度
****************************************************************/
int main(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
/* 开发板硬件初始化 */
BSP_Init();
printf("这是一个[野火]-STM32全系列开发板-FreeRTOS任务通知代替计数信号量实验!\n");
printf("车位默认值为0个,按下KEY1申请车位,按下KEY2释放车位!\n\n");
/* 创建AppTaskCreate任务 */
xReturn = xTaskCreate((TaskFunction_t )AppTaskCreate, /* 任务入口函数 */
(const char* )"AppTaskCreate",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )1, /* 任务的优先级 */
(TaskHandle_t* )&AppTaskCreate_Handle);/* 任务控制块指针 */
/* 启动任务调度 */
if(pdPASS == xReturn)
vTaskStartScheduler(); /* 启动任务,开启调度 */
else
return -1;
while(1); /* 正常不会执行到这里 */
}
/***********************************************************************
* @ 函数名 : AppTaskCreate
* @ 功能说明: 为了方便管理,所有的任务创建函数都放在这个函数里面
* @ 参数 : 无
* @ 返回值 : 无
**********************************************************************/
static void AppTaskCreate(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
taskENTER_CRITICAL(); //进入临界区
/* 创建Take_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )Take_Task, /* 任务入口函数 */
(const char* )"Take_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL, /* 任务入口函数参数 */
(UBaseType_t )2, /* 任务的优先级 */
(TaskHandle_t* )&Take_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建Take_Task任务成功!\r\n");
/* 创建Give_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )Give_Task, /* 任务入口函数 */
(const char* )"Give_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )3, /* 任务的优先级 */
(TaskHandle_t* )&Give_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建Give_Task任务成功!\n\n");
vTaskDelete(AppTaskCreate_Handle); //删除AppTaskCreate任务
taskEXIT_CRITICAL(); //退出临界区
}
/**********************************************************************
* @ 函数名 : Take_Task
* @ 功能说明: Take_Task任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void Take_Task(void* parameter)
{
uint32_t take_num = pdTRUE;/* 定义一个创建信息返回值,默认为pdPASS */
/* 任务都是一个无限循环,不能返回 */
while (1)
{
//如果KEY1被单击
if( Key_Scan(KEY1_GPIO_PORT,KEY1_PIN) == KEY_ON )
{
/* uint32_t ulTaskNotifyTake( BaseType_t xClearCountOnExit, TickType_t xTicksToWait );
* xClearCountOnExit:pdTRUE 在退出函数的时候任务任务通知值清零,类似二值信号量
* pdFALSE 在退出函数ulTaskNotifyTakeO的时候任务通知值减一,类似计数型信号量。
*/
//获取任务通知 ,没获取到则不等待
take_num=ulTaskNotifyTake(pdFALSE,0);//
if(take_num > 0)
printf( "KEY1被按下,成功申请到停车位,当前车位为 %d \n", take_num - 1);
else
printf( "KEY1被按下,车位已经没有了,请按KEY2释放车位\n" );
}
vTaskDelay(20); //每20ms扫描一次
}
}
/**********************************************************************
* @ 函数名 : Give_Task
* @ 功能说明: Give_Task任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void Give_Task(void* parameter)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
/* 任务都是一个无限循环,不能返回 */
while (1)
{
//如果KEY2被单击
if( Key_Scan(KEY2_GPIO_PORT,KEY2_PIN) == KEY_ON )
{
/* 原型:BaseType_t xTaskNotifyGive( TaskHandle_t xTaskToNotify ); */
/* 释放一个任务通知 */
xTaskNotifyGive(Take_Task_Handle);//发送任务通知
/* 此函数只会返回pdPASS */
if ( pdPASS == xReturn )
printf( "KEY2被按下,释放1个停车位。\n" );
}
vTaskDelay(20); //每20ms扫描一次
}
}
/***********************************************************************
* @ 函数名 : BSP_Init
* @ 功能说明: 板级外设初始化,所有板子上的初始化均可放在这个函数里面
* @ 参数 :
* @ 返回值 : 无
*********************************************************************/
static void BSP_Init(void)
{
/*
* STM32中断优先级分组为4,即4bit都用来表示抢占优先级,范围为:0~15
* 优先级分组只需要分组一次即可,以后如果有其他的任务需要用到中断,
* 都统一用这个优先级分组,千万不要再分组,切忌。
*/
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 );
/* LED 初始化 */
LED_GPIO_Config();
/* 串口初始化 */
Debug_USART_Config();
/* 按键初始化 */
Key_GPIO_Config();
}
/********************************END OF FILE****************************/
14.3.4 任务通知代替事件组
/**
*********************************************************************
* @file main.c
* @author fire
* @version V1.0
* @date 2018-xx-xx
* @brief FreeRTOS V9.0.0 + STM32 任务通知代替事件组
**********************************************************************
*/
/*
*************************************************************************
* 包含的头文件
*************************************************************************
*/
/* FreeRTOS头文件 */
#include "FreeRTOS.h"
#include "task.h"
#include "event_groups.h"
/* 开发板硬件bsp头文件 */
#include "bsp_led.h"
#include "bsp_debug_usart.h"
#include "bsp_key.h"
#include "limits.h"
/**************************** 任务句柄 ********************************/
/*
* 任务句柄是一个指针,用于指向一个任务,当任务创建好之后,它就具有了一个任务句柄
* 以后我们要想操作这个任务都需要通过这个任务句柄,如果是自身的任务操作自己,那么
* 这个句柄可以为NULL。
*/
static TaskHandle_t AppTaskCreate_Handle = NULL;/* 创建任务句柄 */
static TaskHandle_t LED_Task_Handle = NULL;/* LED_Task任务句柄 */
static TaskHandle_t KEY_Task_Handle = NULL;/* KEY_Task任务句柄 */
/********************************** 内核对象句柄 *********************************/
/*
* 信号量,消息队列,事件标志组,软件定时器这些都属于内核的对象,要想使用这些内核
* 对象,必须先创建,创建成功之后会返回一个相应的句柄。实际上就是一个指针,后续我
* 们就可以通过这个句柄操作这些内核对象。
*
* 内核对象说白了就是一种全局的数据结构,通过这些数据结构我们可以实现任务间的通信,
* 任务间的事件同步等各种功能。至于这些功能的实现我们是通过调用这些内核对象的函数
* 来完成的
*
*/
/******************************* 全局变量声明 ************************************/
/*
* 当我们在写应用程序的时候,可能需要用到一些全局变量。
*/
/******************************* 宏定义 ************************************/
/*
* 当我们在写应用程序的时候,可能需要用到一些宏定义。
*/
#define KEY1_EVENT (0x01 << 0)//设置事件掩码的位0
#define KEY2_EVENT (0x01 << 1)//设置事件掩码的位1
/*
*************************************************************************
* 函数声明
*************************************************************************
*/
static void AppTaskCreate(void);/* 用于创建任务 */
static void LED_Task(void* pvParameters);/* LED_Task 任务实现 */
static void KEY_Task(void* pvParameters);/* KEY_Task 任务实现 */
static void BSP_Init(void);/* 用于初始化板载相关资源 */
/*****************************************************************
* @brief 主函数
* @param 无
* @retval 无
* @note 第一步:开发板硬件初始化
第二步:创建APP应用任务
第三步:启动FreeRTOS,开始多任务调度
****************************************************************/
int main(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
/* 开发板硬件初始化 */
BSP_Init();
printf("这是一个[野火]-STM32全系列开发板-FreeRTOS任务通知代替事件组实验!\n");
printf("按下KEY1|KEY2发送任务事件通知!\n");
/* 创建AppTaskCreate任务 */
xReturn = xTaskCreate((TaskFunction_t )AppTaskCreate, /* 任务入口函数 */
(const char* )"AppTaskCreate",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )1, /* 任务的优先级 */
(TaskHandle_t* )&AppTaskCreate_Handle);/* 任务控制块指针 */
/* 启动任务调度 */
if(pdPASS == xReturn)
vTaskStartScheduler(); /* 启动任务,开启调度 */
else
return -1;
while(1); /* 正常不会执行到这里 */
}
/***********************************************************************
* @ 函数名 : AppTaskCreate
* @ 功能说明: 为了方便管理,所有的任务创建函数都放在这个函数里面
* @ 参数 : 无
* @ 返回值 : 无
**********************************************************************/
static void AppTaskCreate(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
taskENTER_CRITICAL(); //进入临界区
/* 创建LED_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )LED_Task, /* 任务入口函数 */
(const char* )"LED_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL, /* 任务入口函数参数 */
(UBaseType_t )2, /* 任务的优先级 */
(TaskHandle_t* )&LED_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建LED_Task任务成功!\r\n");
/* 创建KEY_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )KEY_Task, /* 任务入口函数 */
(const char* )"KEY_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )3, /* 任务的优先级 */
(TaskHandle_t* )&KEY_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建KEY_Task任务成功!\n");
vTaskDelete(AppTaskCreate_Handle); //删除AppTaskCreate任务
taskEXIT_CRITICAL(); //退出临界区
}
/**********************************************************************
* @ 函数名 : LED_Task
* @ 功能说明: LED_Task任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void LED_Task(void* parameter)
{
uint32_t r_event = 0; /* 定义一个事件接收变量 */
uint32_t last_event = 0;/* 定义一个保存事件的变量 */
BaseType_t xReturn = pdTRUE;/* 定义一个创建信息返回值,默认为pdPASS */
/* 任务都是一个无限循环,不能返回 */
while (1)
{
/* BaseType_t xTaskNotifyWait(uint32_t ulBitsToClearOnEntry,
uint32_t ulBitsToClearOnExit,
uint32_t *pulNotificationValue,
TickType_t xTicksToWait );
* ulBitsToClearOnEntry:当没有接收到任务通知的时候将任务通知值与此参数的取
反值进行按位与运算,当此参数为Oxfffff或者ULONG_MAX的时候就会将任务通知值清零。
* ulBits ToClearOnExit:如果接收到了任务通知,在做完相应的处理退出函数之前将
任务通知值与此参数的取反值进行按位与运算,当此参数为0xfffff或者ULONG MAX的时候
就会将任务通知值清零。
* pulNotification Value:此参数用来保存任务通知值。
* xTick ToWait:阻塞时间。
*
* 返回值:pdTRUE:获取到了任务通知。pdFALSE:任务通知获取失败。
*/
//获取任务通知 ,没获取到则一直等待
xReturn = xTaskNotifyWait(0x0, //进入函数的时候不清除任务bit
ULONG_MAX, //退出函数的时候清除所有的bitR
&r_event, //保存任务通知值
portMAX_DELAY); //阻塞时间
if( pdTRUE == xReturn )
{
last_event |= r_event;
/* 如果接收完成并且正确 */
if(last_event == (KEY1_EVENT|KEY2_EVENT))
{
last_event = 0; /* 上一次的事件清零 */
printf ( "Key1与Key2都按下\n");
LED1_TOGGLE; //LED1 反转
}
else /* 否则就更新事件 */
last_event = r_event; /* 更新上一次触发的事件 */
}
}
}
/**********************************************************************
* @ 函数名 : KEY_Task
* @ 功能说明: KEY_Task任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void KEY_Task(void* parameter)
{
/* 任务都是一个无限循环,不能返回 */
while (1)
{
if( Key_Scan(KEY1_GPIO_PORT,KEY1_PIN) == KEY_ON )
{
printf ( "KEY1被按下\n" );
/* 原型:BaseType_t xTaskNotify( TaskHandle_t xTaskToNotify,
uint32_t ulValue,
eNotifyAction eAction );
* eNoAction = 0,通知任务而不更新其通知值。
* eSetBits, 设置任务通知值中的位。
* eIncrement, 增加任务的通知值。
* eSetvaluewithoverwrite,覆盖当前通知
* eSetValueWithoutoverwrite 不覆盖当前通知
*
* pdFAIL:当参数eAction设置为eSetValueWithoutOverwrite的时候,
* 如果任务通知值没有更新成功就返回pdFAIL。
* pdPASS: eAction 设置为其他选项的时候统一返回pdPASS。
*/
/* 触发一个事件1 */
xTaskNotify((TaskHandle_t )LED_Task_Handle,//接收任务通知的任务句柄
(uint32_t )KEY1_EVENT, //要触发的事件
(eNotifyAction)eSetBits); //设置任务通知值中的位
}
if( Key_Scan(KEY2_GPIO_PORT,KEY2_PIN) == KEY_ON )
{
printf ( "KEY2被按下\n" );
/* 触发一个事件2 */
xTaskNotify((TaskHandle_t )LED_Task_Handle,//接收任务通知的任务句柄
(uint32_t )KEY2_EVENT, //要触发的事件
(eNotifyAction)eSetBits); //设置任务通知值中的位
}
vTaskDelay(20); //每20ms扫描一次
}
}
/***********************************************************************
* @ 函数名 : BSP_Init
* @ 功能说明: 板级外设初始化,所有板子上的初始化均可放在这个函数里面
* @ 参数 :
* @ 返回值 : 无
*********************************************************************/
static void BSP_Init(void)
{
/*
* STM32中断优先级分组为4,即4bit都用来表示抢占优先级,范围为:0~15
* 优先级分组只需要分组一次即可,以后如果有其他的任务需要用到中断,
* 都统一用这个优先级分组,千万不要再分组,切忌。
*/
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 );
/* LED 初始化 */
LED_GPIO_Config();
/* 串口初始化 */
Debug_USART_Config();
/* 按键初始化 */
Key_GPIO_Config();
}
/********************************END OF FILE****************************/
15、内存管理
在嵌入式实时操作系统
中,调用 malloc()和 free()却是危险的,原因有以下几点:
这些函数在小型嵌入式系统中并不总是可用的,小型嵌入式设备中的 RAM 不足。
它们的实现可能非常的大,据了相当大的一块代码空间。
他们几乎都不是安全的。
它们并不是确定的,每次调用这些函数执行的时间可能都不一样。
它们有可能产生碎片。
这两个函数会使得链接器配置得复杂。
如果允许堆空间的生长方向覆盖其他变量占据的内存,它们会成为 debug
15.1 Heap_1.c 方案具有以下特点:
heap_1.c管理方案是FreeRTOS提供所有内存管理方案中最简单的一个,它只能申请内存而不能进行内存释放,并且申请内存的时间是一个常量,这样子对于要求安全的嵌入式设备来说是最好的,因为不允许内存释放,就不会产生内存碎片而导致系统崩溃,但是也有缺点,那就是内存利用率不高,某段内存只能用于内存申请的地方,即使该内存只使用一次,也无法让系统回收重新利用。
1、 用于从不删除任务、队列、信号量、互斥量等的应用程序(实际上大多数使用 FreeRTOS 的应用程序都符合这个条件)。
2、 函数的执行时间是确定的并且不会产生内存碎片。
它只能申请内存而不能进行内存释放,并且申请内存的时间是一个常量。
如下,八字节对齐。分配完后的样子:
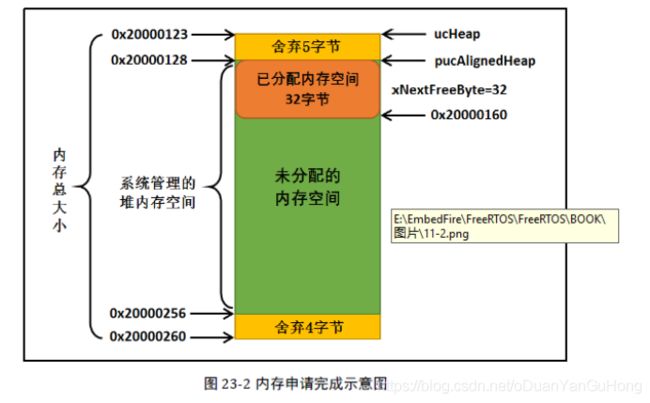
15.2 heap_2.c 方案具有以下特点:
heap_2.c方案与heap_1.c方案采用的内存管理算法不一样,它采用一种最佳匹配算法(best fit algorithm),比如我们申请100字节的内存,而可申请内存中有三块对应大小200字节, 500字节和 1000 字节大小的内存块,按照算法的最佳匹配,这时候系统会把200字节大小的内存块进行分割并返回申请内存的起始地址,剩余的内存则插回链表留待下次申请。Heap_2.c方案支持释放申请的内存,但是它不能把相邻的两个小的内存块合成一个大的内存块,对于每次申请内存大小都比较固定的,这个方式是没有问题的,而对于每次申请并不是固定内存大小的则会造成内存碎片。
- 可以用在那些反复的删除任务、队列、信号量、等内核对象且不担心内存碎片的
应用程序。 - 如果我们的应用程序中的队列、任务、信号量、等工作在一个不可预料的顺序,
这样子也有可能会导致内存碎片。 - 具有不确定性,但是效率比标准 C 库中的 malloc 函数高得多
- 不能用于那些内存分配和释放是随机大小的应用程序。
方案支持释放申请的内存,但是它不能把相邻的两个小的内存块合成一个大的内
存块
15.3 heap_3.c 方案具有以下特点:
heap_3.c方案只是简单的封装了标准C库中的malloc()和free()函数,并且能满足常用的编译器。重新封装后的malloc()和free()函数具有保护功能,采用的封装方式是操作内存前挂起调度器、完成后再恢复调度器。
heap_3.c方案具有以下特点:
1、 需要链接器设置一个堆,malloc()和free()函数由编译器提供。
2、 具有不确定性。
3、 很可能增大RTOS内核的代码大小。
在STM32系列的工程中,这个由编译器定义的堆都在启动文件里面设置,单位为字节, 我们具体以STM32F10x系列为例,具体见图 23-7。而其它系列的都差不多。
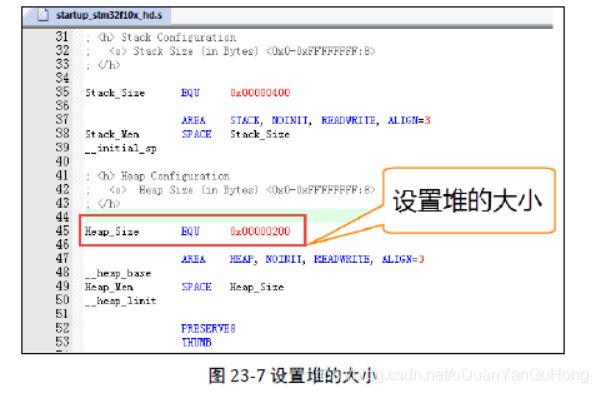
15.4 heap_4.c 方案具有以下特点:
1、可用于重复删除任务、队列、信号量、互斥量等的应用程序
2、可用于分配和释放随机字节内存的应用程序,但并不像 heap2.c 那样产生严重的内
存碎片。
3、具有不确定性,但是效率比标准 C 库中的 malloc 函数高得多。
heap_4.c 方案还包含了一种合并算法,能把相邻的空闲的内存块合并成一个更
大的块,这样可以减少内存碎片。现在基本上都是用的heap4
16 中断管理
16.1 中断处理
当中断产生时,处理机将按如下的顺序执行:
- 保存当前处理机状态信息
- 载入异常或中断处理函数到 PC 寄存器
- 把控制权转交给处理函数并开始执行
- 当处理函数执行完成时,恢复处理器状态信息
- 从异常或中断中返回到前一个程序执行点
中断发生的环境有两种情况:在任务的上下文中,在中断服务函数处理上下文中。
任务在工作的时候,如果此时发生了一个中断,无论中断的优先级是多大,都会打断当前任务的执行,从而转到对应的中断服务函数中执行,其过程具体见图24-1。
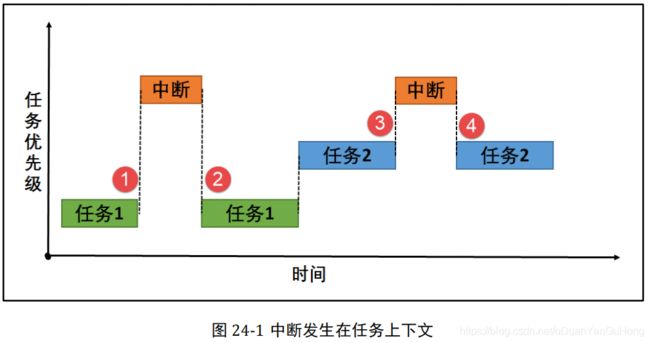
在执行中断服务例程的过程中,如果有更高优先级别的中断源触发中断,由于当前处于中断处理上下文环境中,根据不同的处理器构架可能有不同的处理方式,比如新的中断等待挂起直到当前中断处理离开后再行响应;或新的高优先级中断打断当前中断处理过程,而去直接响应这个更高优先级的新中断源。后面这种情况,称之为中断嵌套。在硬实时环境中,前一种情况是不允许发生的,不能使响应中断的时间尽量的短。而在软件处理(软实时环境)上,FreeRTOS 允许中断嵌套,即在一个中断服务例程期间,处理器可以响应另外一个优先级更高的中断,过程如图 24-2 所示
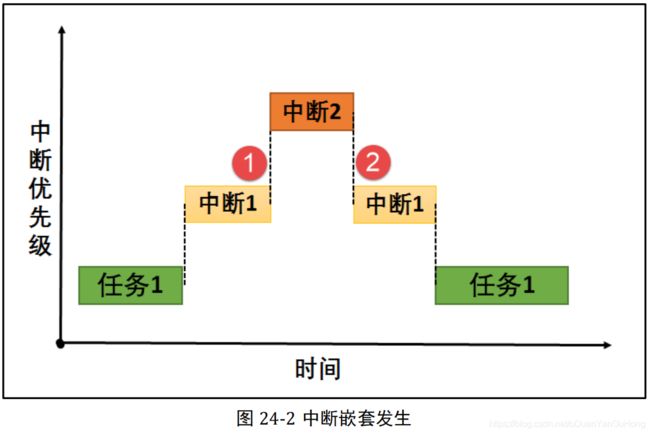
16.2 中断讲解
用户可以自定义配置 系统可管理的最高中断优先级 的宏定义
configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY , 它 是 用 于 配 置 内 核 中 的basepri 寄存器的,当 basepri 设置为某个值的时候,NVIC 不会响应比该优先级低的中断,而优先级比之更高的中断则不受影响。就是说当这个宏定义配置为 5 的时候,中断优先级数值在 0、1、2、3、4 的这些中断是不受 FreeRTOS 屏蔽的,也就是说即使在系统进入临界段的时候,这些中断也能被触发而不是等到退出临界段的时候才被触发,当然,这些中
断服务函数中也不能调用 FreeRTOS 提供的 API 函数接口,而中断优先级在 5 到 15 的这些中断是可以被屏蔽的,也能安全调用 FreeRTOS 提供的 API 函数接口。
17CUP统计率
17.1概念
FreeRTOS是多任务操作系统,对 CPU 都是分时使用的:比如A任务占用10ms,然后B任务占用30ms,然后空闲60ms,再又是A任务占10ms,B任务占30ms,空闲60ms;如果在一段时间内都是如此,那么这段时间内的利用率为40%,因为整个系统中只有40%的时间是CPU处理数据的时间。
FreeRTOS 是使用一个外部的变量进行统计时间的,并且消耗一个高精度的定时器,其用于定时的精度是系统时钟节拍的10-20倍。
FreeRTOS进行CPU利用率统计的时候,也有一定缺陷,因为它没有对进行CPU利用率统计时间的变量做溢出保护,我们使用的是 32 位变量来系统运行的时间计数值,而按20000HZ的中断频率计算,每进入一中断就是50us,变量加一,最大支持计数时间:2^32 * 50us / 3600s =59.6 分钟,运行时间超过了 59.6 分钟后统计的结果将不准确,除此之外整个系统一直响应定时器50us一次的中断会比较影响系统的性能。
//启用运行时间统计功能
#define configGENERATE_RUN_TIME_STATS 1
//启用可视化跟踪调试
#define configUSE_TRACE_FACILITY 1
/* 与宏configUSE_TRACE_FACILITY同时为1时会编译下面3个函数
* prvWriteNameToBuffer()
* vTaskList(),
* vTaskGetRunTimeStats()
*/
void BASIC_TIM_Init(void)
{
BASIC_TIM_NVIC_Config();
BASIC_TIM_Mode_Config();
}
/* 用于统计时间*/
volatile uint32_t CPU_RunTime = 0UL;
void BASIC_TIM_IRQHandler (void)
{
if ( TIM_GetITStatus( BASIC_TIM, TIM_IT_Update) != RESET )
{
CPU_RunTime++;
TIM_ClearITPendingBit(BASIC_TIM , TIM_FLAG_Update);
}
}
17.2举例
/**
*********************************************************************
* @file main.c
* @author fire
* @version V1.0
* @date 2018-xx-xx
* @brief FreeRTOS v9.0.0 + STM32
**********************************************************************
*/
/*
*************************************************************************
* 包含的头文件
*************************************************************************
*/
/* FreeRTOS头文件 */
#include "FreeRTOS.h"
#include "task.h"
/* 开发板硬件bsp头文件 */
#include "bsp_led.h"
#include "bsp_debug_usart.h"
#include "./tim/bsp_basic_tim.h"
#include "string.h"
/**************************** 任务句柄 ********************************/
/*
* 任务句柄是一个指针,用于指向一个任务,当任务创建好之后,它就具有了一个任务句柄
* 以后我们要想操作这个任务都需要通过这个任务句柄,如果是自身的任务操作自己,那么
* 这个句柄可以为NULL。
*/
/* 创建任务句柄 */
static TaskHandle_t AppTaskCreate_Handle = NULL;
/* LED任务句柄 */
static TaskHandle_t LED1_Task_Handle = NULL;
static TaskHandle_t LED2_Task_Handle = NULL;
static TaskHandle_t CPU_Task_Handle = NULL;
/********************************** 内核对象句柄 *********************************/
/*
* 信号量,消息队列,事件标志组,软件定时器这些都属于内核的对象,要想使用这些内核
* 对象,必须先创建,创建成功之后会返回一个相应的句柄。实际上就是一个指针,后续我
* 们就可以通过这个句柄操作这些内核对象。
*
* 内核对象说白了就是一种全局的数据结构,通过这些数据结构我们可以实现任务间的通信,
* 任务间的事件同步等各种功能。至于这些功能的实现我们是通过调用这些内核对象的函数
* 来完成的
*
*/
/******************************* 全局变量声明 ************************************/
/*
* 当我们在写应用程序的时候,可能需要用到一些全局变量。
*/
/*
*************************************************************************
* 函数声明
*************************************************************************
*/
static void AppTaskCreate(void);/* 用于创建任务 */
static void LED1_Task(void* pvParameters);/* LED1_Task任务实现 */
static void LED2_Task(void* pvParameters);/* LED2_Task任务实现 */
static void CPU_Task(void* pvParameters);/* CPU_Task任务实现 */
static void BSP_Init(void);/* 用于初始化板载相关资源 */
/*****************************************************************
* @brief 主函数
* @param 无
* @retval 无
* @note 第一步:开发板硬件初始化
第二步:创建APP应用任务
第三步:启动FreeRTOS,开始多任务调度
****************************************************************/
int main(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
/* 开发板硬件初始化 */
BSP_Init();
printf("这是一个[野火]-STM32全系列开发板-FreeRTOS-CPU利用率统计实验!\r\n");
/* 创建AppTaskCreate任务 */
xReturn = xTaskCreate((TaskFunction_t )AppTaskCreate, /* 任务入口函数 */
(const char* )"AppTaskCreate",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )1, /* 任务的优先级 */
(TaskHandle_t* )&AppTaskCreate_Handle);/* 任务控制块指针 */
/* 启动任务调度 */
if(pdPASS == xReturn)
vTaskStartScheduler(); /* 启动任务,开启调度 */
else
return -1;
while(1); /* 正常不会执行到这里 */
}
/***********************************************************************
* @ 函数名 : AppTaskCreate
* @ 功能说明: 为了方便管理,所有的任务创建函数都放在这个函数里面
* @ 参数 : 无
* @ 返回值 : 无
**********************************************************************/
static void AppTaskCreate(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
taskENTER_CRITICAL(); //进入临界区
/* 创建LED_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )LED1_Task, /* 任务入口函数 */
(const char* )"LED1_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL, /* 任务入口函数参数 */
(UBaseType_t )2, /* 任务的优先级 */
(TaskHandle_t* )&LED1_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建LED1_Task任务成功!\r\n");
/* 创建LED_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )LED2_Task, /* 任务入口函数 */
(const char* )"LED2_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL, /* 任务入口函数参数 */
(UBaseType_t )3, /* 任务的优先级 */
(TaskHandle_t* )&LED2_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建LED2_Task任务成功!\r\n");
/* 创建LED_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )CPU_Task, /* 任务入口函数 */
(const char* )"CPU_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL, /* 任务入口函数参数 */
(UBaseType_t )4, /* 任务的优先级 */
(TaskHandle_t* )&CPU_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建CPU_Task任务成功!\r\n");
vTaskDelete(AppTaskCreate_Handle); //删除AppTaskCreate任务
taskEXIT_CRITICAL(); //退出临界区
}
/**********************************************************************
* @ 函数名 : LED_Task
* @ 功能说明: LED_Task任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void LED1_Task(void* parameter)
{
while (1)
{
LED1_ON;
vTaskDelay(500); /* 延时500个tick */
printf("LED1_Task Running,LED1_ON\r\n");
LED1_OFF;
vTaskDelay(500); /* 延时500个tick */
printf("LED1_Task Running,LED1_OFF\r\n");
}
}
static void LED2_Task(void* parameter)
{
while (1)
{
LED2_ON;
vTaskDelay(500); /* 延时500个tick */
printf("LED2_Task Running,LED1_ON\r\n");
LED2_OFF;
vTaskDelay(500); /* 延时500个tick */
printf("LED2_Task Running,LED1_OFF\r\n");
}
}
static void CPU_Task(void* parameter)
{
uint8_t CPU_RunInfo[400]; //保存任务运行时间信息
while (1)
{
memset(CPU_RunInfo,0,400); //信息缓冲区清零
vTaskList((char *)&CPU_RunInfo); //获取任务运行时间信息
printf("---------------------------------------------\r\n");
printf("任务名 任务状态 优先级 剩余栈 任务序号\r\n");
printf("%s", CPU_RunInfo);
printf("---------------------------------------------\r\n");
memset(CPU_RunInfo,0,400); //信息缓冲区清零
vTaskGetRunTimeStats((char *)&CPU_RunInfo);
printf("任务名 运行计数 使用率\r\n");
printf("%s", CPU_RunInfo);
printf("---------------------------------------------\r\n\n");
vTaskDelay(1000); /* 延时500个tick */
}
}
/***********************************************************************
* @ 函数名 : BSP_Init
* @ 功能说明: 板级外设初始化,所有板子上的初始化均可放在这个函数里面
* @ 参数 :
* @ 返回值 : 无
*********************************************************************/
static void BSP_Init(void)
{
/*
* STM32中断优先级分组为4,即4bit都用来表示抢占优先级,范围为:0~15
* 优先级分组只需要分组一次即可,以后如果有其他的任务需要用到中断,
* 都统一用这个优先级分组,千万不要再分组,切忌。
*/
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 );
/* LED 初始化 */
LED_GPIO_Config();
/* 串口初始化 */
Debug_USART_Config();
/* 基本定时器初始化 */
TIMx_Configuration();
}
/********************************END OF FILE****************************/