Unity中表示旋转有三种方式:四元数,欧拉角,矩阵
一、四元数
1、概念
Quaternion中存放了x,y,z,w四个数据成员,可以用下标来进行访问,对应的下标分别是0,1,2,3
其实最简单来说:四元数就是表示一个3D物体的旋转,它是一种全新数学数字,甚至不是复数。
四元数其实就是表示旋转。
1、四元数的书写格式
q = w v 这里w是标量,v是向量
另一种表示格式
q = w(x,y,z) 看到这里我们就熟悉了。
一般我们在Unity中表示旋转的方式:
c.Rotate (new Vector3(10,0,0));
c.Rotate (Quaternion.identity * Vector3.left);
2、Unity中四元数API
- 1.来把角度转化为相应四元素
Quaternion rot=Quaternion.Euler(30,60,90);
旋转顺序是,先绕Z轴转动90度,再绕X轴转动30度,最后绕Y轴转动60度
- 2.绕指定轴旋转指定角度相应的四元素
Quaternion rot= Quaternion.AngleAxis(60, transform.forward);
意思为绕自身正方向转60度其相应的四元素,当然了,第一个参数可以是其他方向变量
- 3.两个四元素相乘,代表按顺序进行两次旋转
Quaternion rot1=Quaternion.Euler(0,30,0);
Quaternion rot2=Quaternion.Euler(0,0,45);
Quaternion rot=rot2*rot1;
意思是先绕y旋转30度再绕z旋转45度,所以,你要先绕哪个四元素先旋转就放最右边
- 4.四元素与向量相乘,得到的是将原向量旋转后的新向量
Vector3 to = Quaternion.AngleAxis(45, Vector3.up)* Vector3.forward
to是将Vector3.forward绕Vector3.up旋转45度后得到的新向量
- 5.已知两个向量,求从一个向量转到另一个向量的四元数:
Quaternion rot=Quaternion.FromToRotation(Vector3.up,Vector3.forward);
这的意思是创建一个从y轴正方向到z轴正方向的旋转角度所对应的四元数
例子:
Vector3 aimDirection=(targetTrans.position – transform.position).normalized;
Quaternion rot = Quaternion.FromToRotation(transform.up,aimDirection);
transform.rotation = rot * transform.rotation;
此游戏对象自身转向这个计算出来的偏转角所对应的四元数,如果将此至于Update中就可以做到不断对准目标
- 6.创建一个让Z轴正方向和Y轴正方向指向规定方向的旋转
Quaternion rot = Quaternion.LookRotation(Vector3.right, Vector3.down);
这的意思是创建一个让Z轴正方向指向世界坐标x轴正向,y轴正方向竖直向下的旋转角度所对应的四元数
Vector3 vr = new Vector3(1,0,0);
Quaternion q = Quaternion.LookRotation(vr);
void SetLookRotation(Vector3 view);
void SetLookRotation(Vector3 view,Vector3 up);
也是根据指定的向前和向上向量创建四元数,本质计算过程和LookRotation一样,
只不过LookRotation是Quaternion上的静态函数,而SetLookRotation则是Quaternion的成员函数。
- 7.已知两个由四元数代表的旋转角度,求出从一个角度渐变到另一个角度的增量
Quaternion rot=Quaternion.Euler(0,30,0)
Quaternion targetRot= rot*transform.rotation;
transform.rotation= Quaternion.RotateTowards(transform.rotation,targetRot,90*Time.deltaTime);
意思为游戏对象的角度会逐渐向targetRot以90*Time.deltaTime的角速度(90度每秒)逐渐逼近,因为这代码并不能够在一帧中完成所以要放于update中
- 8.两个四元数之间的线性插值lerp
transform.rotation=Quaternion.Lerp(transform.rotation,Vector3.up,0.5f);
第一个参数是起始的角度所对应的四元数
第一个参数是终点的角度所对应的四元数
第三个参数是这个过程需要多少秒
- 9.两个四元数之间的球形插值Slerp
transform.rotation=Quaternion.Slerp(transform.rotation,Vector3.up,0.5f);
第一个参数是起始的角度所对应的四元数
第一个参数是终点的角度所对应的四元数
第三个参数是这个过程需要多少秒
- 10.旋转轴和旋转角度算出四元数
Quaternion RotateTowards(Quaternion from,Quaternion to, float maxDegreesDelta);
以maxDegreesDelta作为角度步长计算从from到[to]
根据旋转轴和旋转角度算出四元数
- 11.四元数对应的三个轴向的欧拉角
Quaternion.eulerAngles
存放四元数对应的三个轴向的欧拉角,分别是绕x轴、y轴、z轴旋转的角度
Quaternion q3 = new Quaternion();
q3.eulerAngles = new Vector3(10, 30, 20);
Quaternion qx3 = Quaternion.AngleAxis(10,Vector3.right);
Quaternion qy3 = Quaternion.AngleAxis(30,Vector3.up);
Quaternion qz3 = Quaternion.AngleAxis(20,Vector3.forward);
Quaternion qxyz3 = qz3*qy3*qx3;
从这里可以看出unity中旋转顺序也是按先绕x轴旋转,然后y,最后z。unity中对向量应用旋转量使用的是向量右乘,即如下:
Vector3 newV = qxyz3*v=qz3*qy3*qx3*v;
四元数实例
- eulerAngles
public class EulerAngle: MonoBehaviour
{
// 两个物体A,B
public Transform A, B;
// 默认角度
Quaternion rotations=Quaternion.identity;
Vector3 eulerAngle = Vector3.zero;
float speed = 10.0f;
void Update()
{
//第一种方式:将Quaternion赋值给transform的rotation
rotations.eulerAngles = new Vector3(0.0f, speed * Time.time, 0.0f);
A.rotation = rotations;
//第二种方式:将三维向量代表的欧拉角直接赋值给transform的eulerAngles
eulerAngle = new Vector3(0.0f, speed * Time.time, 0.0f);
B.eulerAngles = eulerAngle;
}
}
- SetFormToRotation
注意点:不能直接obj.rotation.SetFromToRotation(A.position,B.position);因为需要实例化才能赋值给transform.rotation.
public class SetFromToRotation : MonoBehaviour {
public Transform A, B, C;
Quaternion q1 = Quaternion.identity;
void Update () {
//不可直接使用C.rotation.SetFromToRotation(A.position,B.position);
q1.SetFromToRotation(A.position,B.position);
C.rotation = q1;
Debug.DrawLine(Vector3.zero,A.position,Color.red);
Debug.DrawLine(Vector3.zero, B.position, Color.green);
Debug.DrawLine(C.position, C.position+new Vector3(0.0f,1.0f,0.0f), Color.black);
Debug.DrawLine(C.position, C.TransformPoint(Vector3.up*1.5f), Color.yellow);
}
}
- SetLookRotation : 设置Quaternion实例的朝向。此方法的功能是对一个Quaternion的实例的朝向进行设置。
public class LookRotation_ts : MonoBehaviour
{
public Transform A, B, C, D;
Quaternion q1 = Quaternion.identity;
void Update()
{
//使用实例方法
//不可直接使用C.rotation.SetLookRotation(A.position,B.position);
q1.SetLookRotation(A.position, B.position);
C.rotation = q1;
//使用类方法
D.rotation = Quaternion.LookRotation(A.position, B.position);
//绘制直线,请在Scene视图中查看
Debug.DrawLine(Vector3.zero, A.position, Color.white);
Debug.DrawLine(Vector3.zero, B.position, Color.white);
Debug.DrawLine(C.position, C.TransformPoint(Vector3.up * 2.5f), Color.white);
Debug.DrawLine(C.position, C.TransformPoint(Vector3.forward * 2.5f), Color.white);
Debug.DrawLine(D.position, D.TransformPoint(Vector3.up * 2.5f), Color.white);
Debug.DrawLine(D.position, D.TransformPoint(Vector3.forward * 2.5f), Color.white);
}
}
- ToAngleAxis :Quaternion实例的角轴表示。其中angle为旋转角,axis为轴向量。
public class ToAngleAxis : MonoBehaviour
{
public Transform A, B;
float angle;
Vector3 axis = Vector3.zero;
void Update()
{
//使用ToAngleAxis获取A的Rotation的旋转轴和角度
A.rotation.ToAngleAxis(out angle, out axis);
//使用AngleAxis设置B的rotation,使得B的rotation状态的和A相同
//可以在程序运行时修改A的rotation查看B的状态
B.rotation = Quaternion.AngleAxis(angle, axis);
}
}
- Angle方法: Quaternion实例间夹角
注意:返回的是GameObject对象从后面状态(a)转换到(b)时需要旋转的最小夹角。
public class Angle : MonoBehaviour {
void Start()
{
Quaternion q1 = Quaternion.identity;
Quaternion q2 = Quaternion.identity;
q1.eulerAngles = new Vector3(10.0f, 20.0f, 30.0f);
float f1 = Quaternion.Angle(q1,q2);
float f2 = 0.0f;
Vector3 v1 = Vector3.zero;
q1.ToAngleAxis(out f2, out v1);
Debug.Log("f1:" + f1);
Debug.Log("f2:" + f2);
Debug.Log("q1的欧拉角:" + q1.eulerAngles + " q1的rotation:" + q1);
Debug.Log("q2的欧拉角:" + q2.eulerAngles + " q2的rotation:" + q2);
}
}
- Dot方法:点乘
用来求参数a和b的点乘。q1(x1,y1,z1,w1),q2(x2,y2,z2,w2)为两个实例则float f = Quaternion.Dot(q1,q2); 等价于f = x1x2 + y1y2 + z1z2 + w1w2.
当f = ±1 时,q1和q2对应的欧拉角是相等的,在Game视图中看他们旋转状态是一样的。
当f=1时,它们的rotation相等;
当f=-1时,说明其中一个rotation比另一个多旋转了360°
public class Dot : MonoBehaviour {
public Transform A, B;
Quaternion q1=Quaternion.identity;
Quaternion q2=Quaternion.identity;
float f;
void Start () {
A.eulerAngles = new Vector3(0.0f,40.0f,0.0f);
//B比A绕Y轴多转360度
B.eulerAngles = new Vector3(0.0f, 360.0f+40.0f, 0.0f);
q1 = A.rotation;
q2 = B.rotation;
f = Quaternion.Dot(q1,q2);
Debug.Log("q1的rotation:"+q1);
Debug.Log("q2的rotation:" + q2);
Debug.Log("q1的欧拉角:" + q1.eulerAngles);
Debug.Log("q2的欧拉角:" + q2.eulerAngles);
Debug.Log("Dot(q1,q2):"+f);
}
}
-
Euler方法:欧拉角对应的四元数
 Euler
Euler
public class Euler : MonoBehaviour
{
//记录欧拉角,单位为角度,可以在Inspector面板中设置
public float ex, ey, ez;
//用于记录计算结果
float qx, qy, qz, qw;
float PIover180 = 0.0174532925f;//常量
Quaternion Q = Quaternion.identity;
void OnGUI()
{
if (GUI.Button(new Rect(10.0f, 10.0f, 100.0f, 45.0f), "计算"))
{
Debug.Log("欧拉角:" + " ex:" + ex + " ey:" + ey + " ez:" + ez);
//调用方法计算
Q = Quaternion.Euler(ex, ey, ez);
Debug.Log("Q.x:" + Q.x + " Q.y:" + Q.y + " Q.z:" + Q.z + " Q.w:" + Q.w);
//测试算法
ex = ex * PIover180 / 2.0f;
ey = ey * PIover180 / 2.0f;
ez = ez * PIover180 / 2.0f;
qx = Mathf.Sin(ex) * Mathf.Cos(ey) * Mathf.Cos(ez) + Mathf.Cos(ex) * Mathf.Sin(ey) * Mathf.Sin(ez);
qy = Mathf.Cos(ex) * Mathf.Sin(ey) * Mathf.Cos(ez) - Mathf.Sin(ex) * Mathf.Cos(ey) * Mathf.Sin(ez);
qz = Mathf.Cos(ex) * Mathf.Cos(ey) * Mathf.Sin(ez) - Mathf.Sin(ex) * Mathf.Sin(ey) * Mathf.Cos(ez);
qw = Mathf.Cos(ex) * Mathf.Cos(ey) * Mathf.Cos(ez) + Mathf.Sin(ex) * Mathf.Sin(ey) * Mathf.Sin(ez);
Debug.Log(" qx:" + qx + " qy:" + qy + " qz:" + qz + " qw:" + qw);
}
}
}
-FromToRotation方法:Quaternion变换
public class FromToRotation : MonoBehaviour
{
public Transform A, B, C, D;
Quaternion q1 = Quaternion.identity;
void Update()
{
//使用实例方法
//不可直接使用C.rotation.SetFromToRotation(A.position,B.position);
q1.SetFromToRotation(A.position, B.position);
C.rotation = q1;
//使用类方法
D.rotation = Quaternion.FromToRotation(A.position, B.position);
//在Scene视图中绘制直线
Debug.DrawLine(Vector3.zero, A.position, Color.white);
Debug.DrawLine(Vector3.zero, B.position, Color.white);
Debug.DrawLine(C.position, C.position + new Vector3(0.0f, 1.0f, 0.0f), Color.white);
Debug.DrawLine(C.position, C.TransformPoint(Vector3.up * 1.5f), Color.white);
Debug.DrawLine(D.position, D.position + new Vector3(0.0f, 1.0f, 0.0f), Color.white);
Debug.DrawLine(D.position, D.TransformPoint(Vector3.up * 1.5f), Color.white);
}
}
- Lerp方法:线性插值
- Slerp方法:球面插值
当参数t≤0时返回值为from,当参数t≥1时返回值为to。一般情况下两种方法使用lerp代替
public class Slerp : MonoBehaviour
{
public Transform A, B, C, D;
float speed = 0.2f;
//分别演示方法Slerp和Lerp的使用
void Update()
{
C.rotation = Quaternion.Slerp(A.rotation, B.rotation, Time.time * speed);
D.rotation = Quaternion.Lerp(A.rotation, B.rotation, Time.time * speed);
}
}
- RotateTowards 方法 : Quaternion插值
from为起始Quaternion,参数to为结束Quaternion,参数maxDegreesDelta为每帧最大角度值。方法用于返回从参数from到to的插值,且返回值的最大角度不超过maxDegreesDelta.当maxDegreesDelta < 0 ,将沿着to到from的方向插值计算。
public class RotateTowards : MonoBehaviour {
public Transform A, B, C;
float speed = 10.0f;
void Update()
{
C.rotation = Quaternion.RotateTowards(A.rotation, B.rotation, Time.time * speed-40.0f);
Debug.Log("C与A的欧拉角的差值:" + (C.eulerAngles-A.eulerAngles) + " maxDegreesDelta:" + (Time.time * speed - 40.0f));
}
}
二、欧拉角
1、概念
1-描述定点转动刚体的位形需要三个独立坐标变量,即x,y,z
2-描述定轴转动的刚体的位形只需要一个独立坐标变量即转角。
3-将定点转动的过程分解为三个相互独立的定轴转动,相应的二三个相互独立的转角,即欧拉角。
2、什么是欧拉角?
Roll 滚动角 Z轴不动
Pitch 俯仰角 X轴不动
Heading(Yaw) 偏航角 : 就是Y轴不动

那么使用欧拉角表示旋转矩阵
绕Z轴旋转

绕Y轴旋转

绕X轴旋转
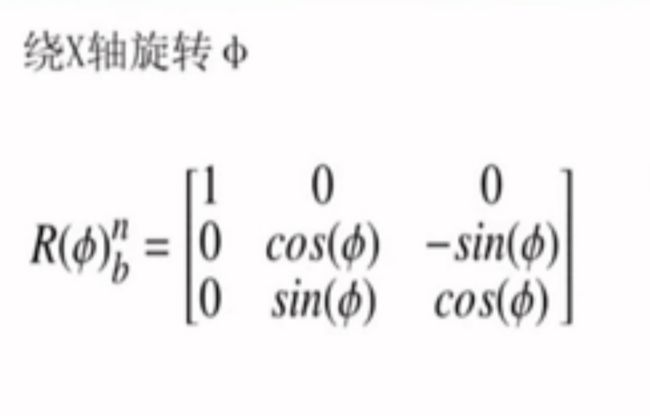


所以说:

3、局限性
欧拉角会产生万向锁bug
一旦选择pitch角为±90°,就被限制在只能绕垂直轴旋转
三、矩阵
1、概念
矩阵通常用在一些特殊的地方,例如摄像机的非标准投影。unity中仅仅提供了一个4×4的矩阵类Matrix4x4,它可以包含位移T、旋转R和伸缩信息。矩阵中的元素都对应一个mxy的公有成员变量,因而要访问单个元素的话可以直接访问其成员。同时也提供了下标访问,如下
public float this [int row, int column]
{
get
{
return this [row + column * 4];
}
set
{
this [row + column * 4] = value;
}
}
public float this [int index]
-
MultiplyPoint方法:投影矩阵变换
 MultiplyPoint
MultiplyPoint

-
MultiplyVector方法:矩阵变换
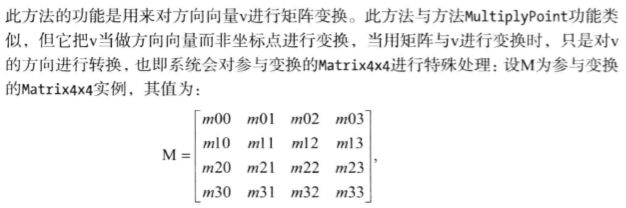 矩阵变换
矩阵变换

- SetTRS方法:重设Matrix4x4变换矩阵
使用Matrix4x4的成员函数SetTRS
void SetTRS(Vector3 pos,Quaternion q,Vector3 s);
Quaternion q = Quaternion.LookRotation(new Vector3(0,0.5,1));
Matrix4x4 rot = new Matrix4x4();
rot.SetTRS(new Vector3(0,0,0),q,new Vector3(1,1,1));
-
Ortho方法:创建正交投影矩阵
 Ortho方法
Ortho方法


-
perspective方法:创建投影矩阵
 image.png
image.png -
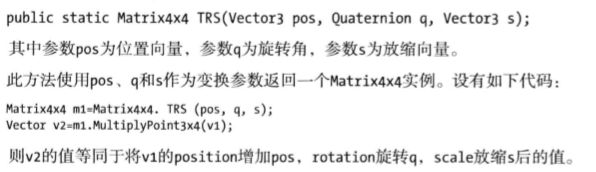
TRS方法:返回Matrix4x4实例
旋转矩阵到四元数
使用Quaternion类的LookRotation函数
static Quaternion LookRotation(Vector3 forward,Vector3 upwards);
Matrix4x4 rot = new Matrix4x4();
rot.SetTRS(new Vector3(0,0,0),q,new Vector3(1,1,1));
Vector4 vy = rot.GetColumn(1);
Vector4 vz = rot.GetColumn(2);
Quaternion q = Quaternion.LookRotation(new Vector3(vz.x,vz.y,vz.z),new Vector3(vy.x,vy.y,vy.z));