STM32控制ULN2003驱动步进电机28BYJ-48
步进电机
步进电动机又称脉冲电动机,是一种将电脉冲信号转换成相应角位移或线位移的电动机。每输入一个脉冲信号,转子就转动一个角度或前进一步,其输出的角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比。
传送门:一文搞懂步进电机特性、原理及驱动器设计
28BYJ-48步进电机
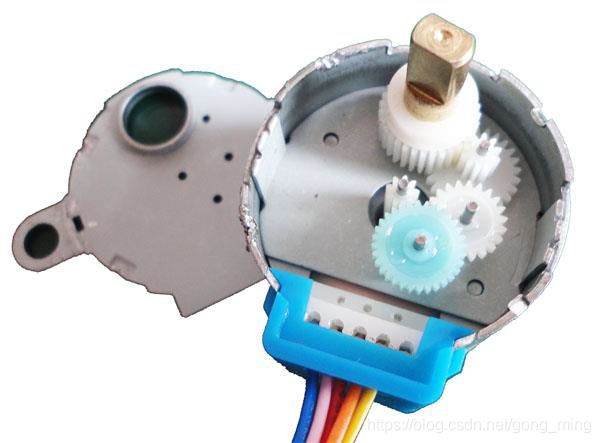
28BYJ-48永磁式减速单极性步进电机
- 28:步进电机的有效最大外径是28毫米
- B:表示是步进电机
- Y:表示是永磁式
- J:表示是减速型(减速比1:64)
- 48:表示四相八拍
传送门:28BYJ-48单极性步进电机
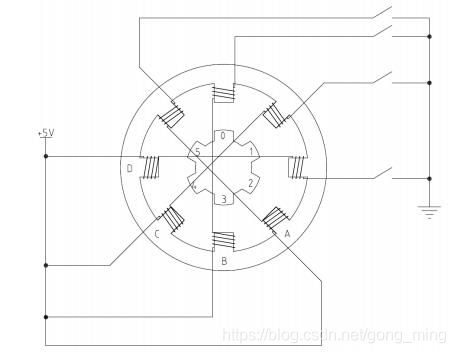
28BYJ-48步进电机的励磁方式
-
1相励磁
励磁控制:一瞬间步进电机只有一个线圈导通,没送一个励磁信号,步
进电机转动一个角度。
特点:精确度好,消耗电力小,但输出转矩最小,振动较大。 -
2相励磁
励磁控制:一瞬间步进电机有两个线圈导通。
特点:输出转矩最大,振动较小。 -
1-2相励磁
励磁控制:1相励磁和2相励磁交替导通。
特点:分辨率高,运转平滑,应用广。
28BYJ-48采用以上方式都可行,相较1相励磁和2相励磁来说,1-2相励磁方式应用更广。1-2相励磁驱动28BYJ-48获得更小的步进角度,运转更平滑,但同时28BYJ-48的转矩会随着1-2相励磁交替改变。
ULN2003

ULN2003驱动板
ULN2003 是高压大电流达林顿晶体管阵列系列产品,具有电流增益高、工作电压高、温度范围宽、带负载能力强等特点,适应于各类要求高速大功率驱动的系统。

ULN2003驱动原理
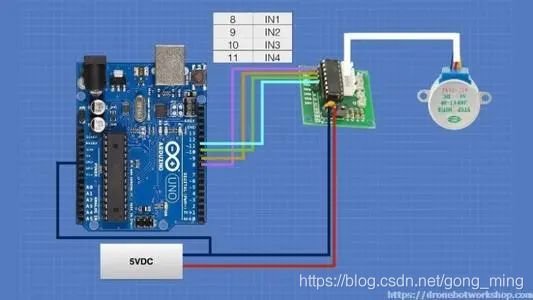
ULN2003驱动28BYJ-48接线
在实际使用中,只需要使用单片机的IO接ULN2003驱动板的IN1-IN4即可,当然,单片机和模块需要共地。
代码实现
(使用STM32F103C8最小系统板)
- 创建step_motor.c和step_motor.h文件,并在step_motor.h中进行宏定义4个IO口,如下:
/* 宏定义 ------------------------------------------ */
/* 步进电机1参数宏 */
#define LA PAout(1) /* A相 */
#define LB PAout(2) /* B相 */
#define LC PAout(3) /* C相 */
#define LD PAout(4) /* D相 */
/* A相 */
#define LA_GPIO_PORT GPIOA
#define LA_GPIO_PIN GPIO_Pin_1
#define LA_GPIO_CLK RCC_APB2Periph_GPIOA
/* B相 */
#define LB_GPIO_PORT GPIOA
#define LB_GPIO_PIN GPIO_Pin_2
#define LB_GPIO_CLK RCC_APB2Periph_GPIOA
/* C相 */
#define LC_GPIO_PORT GPIOA
#define LC_GPIO_PIN GPIO_Pin_3
#define LC_GPIO_CLK RCC_APB2Periph_GPIOA
/* D相 */
#define LD_GPIO_PORT GPIOA
#define LD_GPIO_PIN GPIO_Pin_4
#define LD_GPIO_CLK RCC_APB2Periph_GPIOA
- 在step_motor.c中初始化端口,代码如下:
/**
* @name: Step_Motor_Init
* @description: 步进电机初始化端口
* @param {*}
* @return {*}
*/
void Step_Motor_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(LA_GPIO_CLK | LB_GPIO_CLK | LC_GPIO_CLK | LD_GPIO_CLK, ENABLE);
/* A相端口初始化 */
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStruct.GPIO_Pin = LA_GPIO_PIN;
GPIO_Init(LA_GPIO_PORT, &GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = LB_GPIO_PIN;
GPIO_Init(LB_GPIO_PORT, &GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = LC_GPIO_PIN;
GPIO_Init(LC_GPIO_PORT, &GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = LD_GPIO_PIN;
GPIO_Init(LD_GPIO_PORT, &GPIO_InitStruct);
GPIO_ResetBits(LA_GPIO_PORT, LA_GPIO_PIN);
GPIO_ResetBits(LB_GPIO_PORT, LB_GPIO_PIN);
GPIO_ResetBits(LC_GPIO_PORT, LC_GPIO_PIN);
GPIO_ResetBits(LD_GPIO_PORT, LD_GPIO_PIN);
}
- 在step_motor.c中宏定义或者枚举类型定义每个IO口或者是电机各个相的软件接通位。
比如:
- A相位定义为bit0,当A相导通的时候状态对应0x01;
- B相位定义为bit1,当B相导通时位0x02;以此类推定义C相和D相;
/* 私有类型定义------------------------------------------------- */
typedef enum _PIN_BIT
{
PLA = 0x01,
PLB = 0x02,
PLC = 0x04,
PLD = 0x08,
} Pin_Bit;
- 根据以上定义,很容易算1-2相励磁的时候各个步骤中的每相的状态,将状态组织成为数据,方便后续进行遍历,如下:
只要在以上定义的数字之间,穿插加上一个数字,值为两边的数字求和;
/* 私有变量定义------------------------------------- */
static uint8_t steps[8] = {
0x01, 0x03, 0x02, 0x6, 0x04, 0x0c, 0x08, 0x09};
- 定义电机正转函数:
/**
* @name: Step_Motor_CW
* @description: 电机正转函数
* @param {uint32_t} nms
* @return {*}
*/
void Step_Motor_CW(uint32_t nus)
{
volatile uint8_t i;
uint8_t temp = 0;
for(i = 0; i < 8; i++)
{
temp = steps[i];
LA = (uint8_t)((temp&PLA) >> 0);
LB = (uint8_t)((temp&PLB) >> 1);
LC = (uint8_t)((temp&PLC) >> 2);
LD = (uint8_t)((temp&PLD) >> 3);
delay_us(nus);
}
Step_Motor_Stop();
}
- 定义电机反转函数:
/**
* @name: Step_Motor_CCW
* @description: 电机反转函数
* @param {uint32_t} nms
* @return {*}
*/
void Step_Motor_CCW(uint32_t nus)
{
int i;
for(i = 8; i > 0; i--)
{
LA = (uint8_t)((steps[i-1]&PLA) >> 0);
LB = (uint8_t)((steps[i-1]&PLB) >> 1);
LC = (uint8_t)((steps[i-1]&PLC) >> 2);
LD = (uint8_t)((steps[i-1]&PLD) >> 3);
delay_us(nus);
}
Step_Motor_Stop();
}
- 定义一个电机停转函数,为了让电机停止的时候每一相都断电,不然长期通电会使电机线圈发热严重:
/**
* @name: Step_Motor_Stop
* @description: 电机停止
* @param {*}
* @return {*}
*/
void Step_Motor_Stop(void)
{
LA = 0;
LB = 0;
LC = 0;
LD = 0;
}
最后,在main.c中进行测试:
int main(void)
{
initSysTick();
LED1_Init();
Step_Motor_Init();
for(;;)
{
Step_Motor_CW(1000);
}
}
以上是STM32驱动ULN2003的简单过程,在使用此种方法的同时会带来严重问题:
- 28BYJ-48非常慢,转动一圈需要4096步,如果每步之间需要1ms,一圈需要4.096s;
- 在电机旋转函数中调用了delay_ms进行每步之间的保持时间,消耗cpu运行效率,阻塞其他任务执行;
- 如果28BYJ-48转动10圈,那么相当于cpu在41s一直在执行电机相位切换和delay_ms函数,阻塞整个程序,不利于整个系统的稳定性;
所以,如果想要系统及时稳定的处理其他问题,以上这样驱动ULN2003是不可取的,怎样才能在不影响系统及时稳定的前提下,驱动ULN2003呢?
请看下节分析
以上传送门:完整工程的驱动传
喜欢请点个赞哦,欢迎大家指正,谢谢