面试官问:“在项目中用过多线程吗?”你就把这个案例讲给他听!
文章目录
- 多线程开发实例
-
- 应用背景
- 设计要点
-
- 防止重复
- 失败机制
- 线程池选择
- 核心代码
- 对线面试官
-
- 面试官:先从最简单的开始,说说什么是线程吧
- 面试官:说说Java里怎么创建线程吧
- 面试官:说说线程的生命周期和状态
- 面试官:我看你提到了线程阻塞,那你再说说线程死锁吧
- 面试官:怎么避免死锁呢?
- 面试官:我看你的例子里用到了synchronized,说说 synchronized的用法吧
- 面试官:除了使用synchronized,还有什么办法来加锁吗?详细说一下
- 面试官:说说synchronized和Lock的区别
- 面试官:你提到了synchronized基于jvm层面,对这个有了解吗?
- synchronized的优化能说一说吗?
- 面试官:说一下CAS
- 面试官:CAS会导致什么问题?
- 面试官:能说一下说下ReentrantLock原理吗
- 面试官:能说一下AQS吗
- 面试官:能说一下Semaphore/CountDownLatch/CyclicBarrier吗
- volatile原理知道吗?
- 面试官:说说你对Java内存模型(JMM)的理解,为什么要用JMM
- 面试官:看你用到了线程池,能说说为什么吗
- 面试官:能说一下线程池的核心参数吗?
- 面试官:完整说一下线程池的工作流程
- 面试官:拒绝策略有哪些
- 面试官:说一下你的核心线程数是怎么选的
- 面试官:说一下有哪些常见阻塞队列
- 面试官:说一下有哪几种常见的线程池吧
在面试当中,有时候会问到你在项目中用过多线程么?
对于普通的应届生或者工作时间不长的初级开发 ???—— crud仔流下了没有技术的眼泪。

博主这里整理了项目中用到了多线程的一个简单的实例,希望能对你有所启发。
多线程开发实例
应用背景
应用的背景非常简单,博主做的项目是一个审核类的项目,审核的数据需要推送给第三方监管系统,这只是一个很简单的对接,但是存在一个问题。
我们需要推送的数据大概三十万条,但是第三方监管提供的接口只支持单条推送(别问为什么不支持批量,问就是没讨撕论比好过)。可以估算一下,三十万条数据,一条数据按3秒算,大概需要250(为什么恰好会是这个数)个小时。
所以就考虑到引入多线程来进行并发操作,降低数据推送的时间,提高数据推送的实时性。

设计要点
防止重复
我们推送给第三方的数据肯定是不能重复推送的,必须要有一个机制保证各个线程推送数据的隔离。
这里有两个思路:
-
- 将所有数据取到集合(内存)中,然后进行切割,每个线程推送不同段的数据
-
- 利用 数据库分页的方式,每个线程取 [start,limit] 区间的数据推送,我们需要保证start的一致性
这里采用了第二种方式,因为考虑到可能数据量后续会继续增加,把所有数据都加载到内存中,可能会有比较大的内存占用。
失败机制
我们还得考虑到线程推送数据失败的情况。
如果是自己的系统,我们可以把多线程调用的方法抽出来加一个事务,一个线程异常,整体回滚。
但是是和第三方的对接,我们都没法做事务的,所以,我们采用了直接在数据库记录失败状态的方法,可以在后面用其它方式处理失败的数据。
线程池选择
在实际使用中,我们肯定是要用到线程池来管理线程,关于线程池,我们常用 ThreadPoolExecutor提供的线程池服务,SpringBoot中同样也提供了线程池异步的方式,虽然SprignBoot异步可能更方便一点,但是使用ThreadPoolExecutor更加直观地控制线程池,所以我们直接使用ThreadPoolExecutor构造方法创建线程池。
大概的技术设计示意图:

核心代码
上面叭叭了一堆,到了show you code的环节了。我将项目里的代码抽取出来,简化出了一个示例。
核心代码如下:
/**
* @Author 三分恶
* @Date 2021/3/5
* @Description
*/
@Service
public class PushProcessServiceImpl implements PushProcessService {
@Autowired
private PushUtil pushUtil;
@Autowired
private PushProcessMapper pushProcessMapper;
private final static Logger logger = LoggerFactory.getLogger(PushProcessServiceImpl.class);
//每个线程每次查询的条数
private static final Integer LIMIT = 5000;
//起的线程数
private static final Integer THREAD_NUM = 5;
//创建线程池
ThreadPoolExecutor pool = new ThreadPoolExecutor(THREAD_NUM, THREAD_NUM * 2, 0, TimeUnit.SECONDS, new LinkedBlockingQueue<>(100));
@Override
public void pushData() throws ExecutionException, InterruptedException {
//计数器,需要保证线程安全
int count = 0;
//未推送数据总数
Integer total = pushProcessMapper.countPushRecordsByState(0);
logger.info("未推送数据条数:{}", total);
//计算需要多少轮
int num = total / (LIMIT * THREAD_NUM) + 1;
logger.info("要经过的轮数:{}", num);
//统计总共推送成功的数据条数
int totalSuccessCount = 0;
for (int i = 0; i < num; i++) {
//接收线程返回结果
List<Future<Integer>> futureList = new ArrayList<>(32);
//起THREAD_NUM个线程并行查询更新库,加锁
for (int j = 0; j < THREAD_NUM; j++) {
synchronized (PushProcessServiceImpl.class) {
int start = count * LIMIT;
count++;
//提交线程,用数据起始位置标识线程
Future<Integer> future = pool.submit(new PushDataTask(start, LIMIT, start));
//先不取值,防止阻塞,放进集合
futureList.add(future);
}
}
//统计本轮推送成功数据
for (Future f : futureList) {
totalSuccessCount = totalSuccessCount + (int) f.get();
}
}
//更新推送标志
pushProcessMapper.updateAllState(1);
logger.info("推送数据完成,需推送数据:{},推送成功:{}", total, totalSuccessCount);
}
/**
* 推送数据线程类
*/
class PushDataTask implements Callable<Integer> {
int start;
int limit;
int threadNo; //线程编号
PushDataTask(int start, int limit, int threadNo) {
this.start = start;
this.limit = limit;
this.threadNo = threadNo;
}
@Override
public Integer call() throws Exception {
int count = 0;
//推送的数据
List<PushProcess> pushProcessList = pushProcessMapper.findPushRecordsByStateLimit(0, start, limit);
if (CollectionUtils.isEmpty(pushProcessList)) {
return count;
}
logger.info("线程{}开始推送数据", threadNo);
for (PushProcess process : pushProcessList) {
boolean isSuccess = pushUtil.sendRecord(process);
if (isSuccess) {
//推送成功
//更新推送标识
pushProcessMapper.updateFlagById(process.getId(), 1);
count++;
} else {
//推送失败
pushProcessMapper.updateFlagById(process.getId(), 2);
}
}
logger.info("线程{}推送成功{}条", threadNo, count);
return count;
}
}
}
代码很长,我们简单说一下关键的地方:
- 线程创建:线程内部类选择了实现Callable接口,这样方便获取线程任务执行的结果,在示例里用于统计线程推送成功的数量
class PushDataTask implements Callable<Integer> {
- 使用 ThreadPoolExecutor 创建线程池,
//创建线程池
ThreadPoolExecutor pool = new ThreadPoolExecutor(THREAD_NUM, THREAD_NUM * 2, 0, TimeUnit.SECONDS, new LinkedBlockingQueue<>(100));
主要构造参数如下:
- corePoolSize:线程核心参数选择了5
- maximumPoolSize:最大线程数选择了核心线程数2倍数
- keepAliveTime:非核心闲置线程存活时间直接置为0
- unit:非核心线程保持存活的时间选择了 TimeUnit.SECONDS 秒
- workQueue:线程池等待队列,使用 容量初始为100的 LinkedBlockingQueue阻塞队列
这里还有没写出来的线程池拒绝策略,采用了默认AbortPolicy:直接丢弃任务,抛出异常。
- 使用 synchronized 来保证线程安全,保证计数器的增加是有序的
synchronized (PushProcessServiceImpl.class) {
- 使用集合来接收线程的运行结果,防止阻塞
List<Future<Integer>> futureList = new ArrayList<>(32);
好了,主要的代码和简单的解析就到这里了。
关于这个简单的demo,这里只是简单地做推送数据处理。考虑一下,这个实例是不是可以用在你项目的某些地方。例如监管系统的数据校验、审计系统的数据统计、电商系统的数据分析等等,只要是有大量数据处理的地方,都可以把这个例子结合到你的项目里,这样你就有了多线程开发的经验。
完整代码仓库地址在文章底部
对线面试官
- 面试官:小伙子,不错,你这个整挺好。
- 老三:那是自然。
- 面试官:呦,小伙子,挺自信,那我得好好考考你。
- 老三:放马过来,但考无妨。

面试官:先从最简单的开始,说说什么是线程吧
要说线程,必先说进程。
进程是程序的⼀次执⾏过程,是系统运⾏程序的基本单位,因此进程是动态的。系统运⾏⼀个程序即是⼀个进程从创建,运⾏到消亡的过程。
线程与进程相似,但线程是⼀个⽐进程更⼩的执⾏单位。⼀个进程在其执⾏的过程中可以产⽣多个线程。与进程不同的是同类的多个线程共享进程的堆和⽅法区资源,但每个线程有⾃⼰的程序计数器、虚拟机栈和本地⽅法栈,所以系统在产⽣⼀个线程,或是在各个线程之间作切换⼯作时,负担要⽐进程⼩得多,也正因为如此,线程也被称为轻量级进程。
面试官:说说Java里怎么创建线程吧
Java里创建线程主要有三种方式:
-
继承 Thread类:Thread 类本质上是实现了 Runnable 接口的一个实例,代表一个线程的实例。启动线程的唯一方法就是通过 Thread 类的 start()实例方法。start()方法是一个 native 方法,它将启动一个新线程,并执行 run()方法。
-
实现 Runnable接口:如果自己的类已经 extends 另一个类,就无法直接 extends Thread,此时,可以实现一个Runnable 接口。
-
实现 Callable接口:实现Callable接口,重写call()方法,可以返回一个 Future类型的返回值。我在上面的例子里就是用到了这种方式。
面试官:说说线程的生命周期和状态
在Java中,线程共有六种状态:
| 状态 | 说明 |
|---|---|
| NEW | 初始状态:线程被创建,但还没有调用start()方法 |
| RUNNABLE | 运行状态:Java线程将操作系统中的就绪和运行两种状态笼统的称作“运行” |
| BLOCKED | 阻塞状态:表示线程阻塞于锁 |
| WAITING | 等待状态:表示线程进入等待状态,进入该状态表示当前线程需要等待其他线程做出一些特定动作(通知或中断) |
| TIME_WAITING | 超时等待状态:该状态不同于 WAITIND,它是可以在指定的时间自行返回的 |
| TERMINATED | 终止状态:表示当前线程已经执行完毕 |
线程在自身的生命周期中, 并不是固定地处于某个状态,而是随着代码的执行在不同的状态之间进行切换,Java线程状态变化如图示:

面试官:我看你提到了线程阻塞,那你再说说线程死锁吧
线程死锁描述的是这样⼀种情况:多个线程同时被阻塞,它们中的⼀个或者全部都在等待某个资源被释放。由于线程被⽆限期地阻塞,因此程序不可能正常终⽌。
如下图所示,线程 A 持有资源 2,线程 B 持有资源 1,他们同时都想申请对⽅的资源,所以这两个线程就会互相等待⽽进⼊死锁状态。

产生死锁必须满足四个条件:
-
互斥条件:该资源任意⼀个时刻只由⼀个线程占⽤。
-
请求与保持条件:⼀个进程因请求资源⽽阻塞时,对已获得的资源保持不放。
-
不剥夺条件:线程已获得的资源在末使⽤完之前不能被其他线程强⾏剥夺,只有⾃⼰使⽤完毕后才释放资源。
-
循环等待条件:若⼲进程之间形成⼀种头尾相接的循环等待资源关系。
面试官:怎么避免死锁呢?
我上⾯说了产⽣死锁的四个必要条件,为了避免死锁,我们只要破坏产⽣死锁的四个条件中的其中⼀个就可以了。
-
破坏互斥条件 :这个条件我们没有办法破坏,因为我们⽤锁本来就是想让他们互斥的(临界资源需要互斥访问)。
-
破坏请求与保持条件 :⼀次性申请所有的资源。
-
破坏不剥夺条件 :占⽤部分资源的线程进⼀步申请其他资源时,如果申请不到,可以主动释放它占有的资源。
-
破坏循环等待条件 :靠按序申请资源来预防。按某⼀顺序申请资源,释放资源则反序释放。破坏循环等待条件。
面试官:我看你的例子里用到了synchronized,说说 synchronized的用法吧
synchronized 关键字最主要的三种使⽤⽅式:
1.修饰实例⽅法: 作⽤于当前对象实例加锁,进⼊同步代码前要获得 当前对象实例的锁
synchronized void method() {
//业务代码
}
2.修饰静态⽅法: 也就是给当前类加锁,会作⽤于类的所有对象实例 ,进⼊同步代码前要获得当前 class 的锁。因为静态成员不属于任何⼀个实例对象,是类成员( static 表明这是该类的⼀个静态资源,不管 new 了多少个对象,只有⼀份)。所以,如果⼀个线程 A 调⽤⼀个实例对象的⾮静态 synchronized ⽅法,⽽线程 B 需要调⽤这个实例对象所属类的静态 synchronized ⽅法,是允许的,不会发⽣互斥现象,因为访问静态 synchronized ⽅法占⽤的锁是当前类的锁,⽽访问⾮静态 synchronized ⽅法占⽤的锁是当前实例对象锁。
synchronized void staic method() {
//业务代码
}
**3.**修饰代码块 :指定加锁对象,对给定对象/类加锁。 synchronized(this|object) 表示进⼊同步代码库前要获得给定对象的锁。 synchronized(类.class) 表示进⼊同步代码前要获得 当前 class 的锁
synchronized(this) {
//业务代码
}
在我的例子里使用synchronized修饰代码块,给PushProcessServiceImpl类加锁,进⼊同步代码前要获得 当前 class 的锁,防止PushProcessServiceImpl类的对象在控制层调用推送数据的方法。
面试官:除了使用synchronized,还有什么办法来加锁吗?详细说一下
可以使用juc包提供的锁。Lock接口主要相关的类和接口如下。

Lock中的主要方法:
- lock:用来获取锁,如果锁被其他线程获取,进入等待状态。
- lockInterruptibly:通过这个方法去获取锁时,如果线程正在等待获取锁,则这个线程能够响应中断,即中断线程的等待状态。
- tryLock:tryLock方法是有返回值的,它表示用来尝试获取锁,如果获取成功,则返回true,如果获取失败(即锁已被其他线程获取),则返回false。
- tryLock(long,TimeUnit):与tryLock类似,只不过是有等待时间,在等待时间内获取到锁返回true,超时返回false。
- unlock:释放锁。
其它接口和类:
- ReetrantLock(可重入锁):实现了Lock接口,可重入锁,内部定义了公平锁与非公平锁。可以完成synchronized 所能完成的所有工作。
- ReadWriteLock(读写锁):
public interface ReadWriteLock {
Lock readLock(); //获取读锁
Lock writeLock(); //获取写锁
}
一个用来获取读锁,一个用来获取写锁。也就是说将文件的读写操作分开,分成2个锁来分配给线程,从而使得多个线程可以同时进行读操作。
- ReetrantReadWriteLock(可重入读写锁):ReetrantReadWriteLock同样支持公平性选择,支持重进入,锁降级。
面试官:说说synchronized和Lock的区别
| 类别 | synchronized | Lock |
|---|---|---|
| 存在层次 | Java的关键字,在jvm层面上 | 是一个接口,api级别 |
| 锁的释放 | 1、以获取锁的线程执行完同步代码,释放锁 2、线程执行发生异常,jvm会让线程释放锁 | 在finally中必须释放锁,不然容易造成线程死锁 |
| 锁的获取 | 假设A线程获得锁,B线程等待。如果A线程阻塞,B线程会一直等待 | 分情况而定,Lock有多个锁获取的方式,具体下面会说道,大致就是可以尝试获得锁,线程可以不用一直等待 |
| 锁状态 | 无法判断 | 可以判断 |
| 锁类型 | 可重入 不可中断 非公平 | 可重入 可判断 可公平(两者皆可) |
| 性能 | 少量同步 | 大量同步 |
面试官:你提到了synchronized基于jvm层面,对这个有了解吗?
synchronized是利用java提供的原⼦性内置锁(monitor 对象),每个对象中都内置了⼀个 ObjectMonitor 对象。这种内置的并且使⽤者看不到的锁也被称为监视器锁。
同步语句块
synchronized 同步语句块的实现使⽤的是 monitorenter 和 monitorexit 指令,其中monitorenter 指令指向同步代码块的开始位置monitorexit 指令则指明同步代码块的结束位置。
执⾏monitorenter指令时会尝试获取内置锁,如果对象没有被锁定或者已经获得了锁,锁的计数器+1。此时其他竞争锁的线程则会进⼊等待队列中。
执⾏monitorexit指令时则会把计数器-1,当计数器值为0时,则锁释放,处于等待队列中的线程再继续竞争锁。
synchronized 修饰⽅法
synchronized 修饰的⽅法并没有 monitorenter 指令和 monitorexit 指令,取得代之的确实是ACC_SYNCHRONIZED 标识,该标识指明了该⽅法是⼀个同步⽅法。JVM 通过该ACC_SYNCHRONIZED 访问标志来辨别⼀个⽅法是否声明为同步⽅法,从⽽执⾏相应的同步调⽤。
当然,二者细节略有不同,但本质上都是获取原子性内置锁。
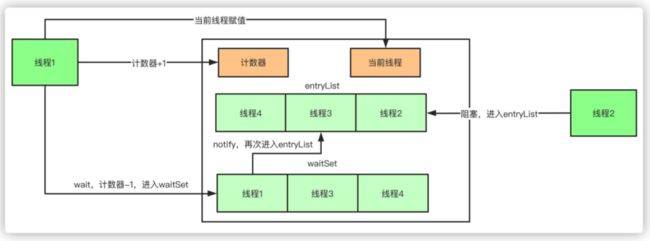
再深入一点,synchronized实际上有两个队列waitSet和entryList。
-
当多个线程进⼊同步代码块时,⾸先进⼊entryList
-
有⼀个线程获取到monitor锁后,就赋值给当前线程,并且计数器+1
-
如果线程调⽤wait⽅法,将释放锁,当前线程置为null,计数器-1,同时进⼊waitSet等待被唤醒,调⽤notify或者notifyAll之后⼜会进⼊entryList竞争锁
-
如果线程执⾏完毕,同样释放锁,计数器-1,当前线程置为null
synchronized的优化能说一说吗?
从JDK1.6版本之后,synchronized本身也在不断优化锁的机制,有些情况下他并不会是⼀个很重量级的锁。优化机制包括⾃适应锁、⾃旋锁、锁消除、锁粗化、偏向锁、轻量级锁。
锁的状态从低到⾼依次为⽆锁**->偏向锁->轻量级锁->**重量级锁,升级的过程就是从低到⾼。

自旋锁:由于⼤部分时候,锁被占⽤的时间很短,共享变量的锁定时间也很短,所有没有必要挂起线程,⽤户态和内核态的来回上下⽂切换严重影响性能。⾃旋的概念就是让线程执⾏⼀个忙循环,可以理解为就是啥也不⼲,防⽌从⽤户态转⼊内核态,⾃旋锁可以通过设置-XX:+UseSpining来开启,⾃旋的默认次数是10次,可以使⽤-XX:PreBlockSpin设置。
自适应锁:自适应锁就是自适应的自旋锁,自旋锁的时间不是固定时间,而是由前⼀次在同⼀个锁上的⾃旋时间和锁的持有者状态来决定。
锁消除:锁消除指的是JVM检测到⼀些同步的代码块,完全不存在数据竞争的场景,也就是不需要加锁,就会进⾏锁消除。
锁粗化:锁粗化指的是有很多操作都是对同⼀个对象进⾏加锁,就会把锁的同步范围扩展到整个操作序列之外。
偏向锁:当线程访问同步块获取锁时,会在对象头和栈帧中的锁记录⾥存储偏向锁的线程ID,之后这个线程再次进⼊同步块时都不需要CAS来加锁和解锁了,偏向锁会永远偏向第⼀个获得锁的线程,如果后续没有其他线程获得过这个锁,持有锁的线程就永远不需要进⾏同步,反之,当有其他线程竞争偏向锁时,持有偏向锁的线程就会释放偏向锁。可以⽤过设置-XX:+UseBiasedLocking开启偏向锁。
轻量级锁:JVM的对象的对象头中包含有⼀些锁的标志位,代码进⼊同步块的时候,JVM将会使⽤CAS⽅式来尝试获取锁,如果更新成功则会把对象头中的状态位标记为轻量级锁,如果更新失败,当前线程就尝试⾃旋来获得锁。
锁升级的过程非常复杂,简单点说,偏向锁就是通过对象头的偏向线程ID来对⽐,甚⾄都不需要CAS了,⽽轻量级锁主要就是通过CAS修改对象头锁记录和⾃旋来实现,重量级锁则是除了拥有锁的线程其他全部阻塞。

面试官:说一下CAS
CAS(Compare And Swap/Set)比较并交换,CAS 算法的过程是这样:它包含 3 个参数CAS(V,E,N)。V 表示要更新的变量(内存值),E 表示预期值(旧的),N 表示新值。当且仅当 V 值等于 E 值时,才会将 V 的值设为 N,如果 V 值和 E 值不同,则说明已经有其他线程做了更新,则当前线程什么都不做。最后,CAS 返回当前 V 的真实值。
CAS是一种乐观锁,它总是认为自己可以成功完成操作。当多个线程同时使用 CAS 操作一个变量时,只有一个会胜出,并成功更新,其余均会失败。失败的线程不会被挂起,仅是被告知失败,并且允许再次尝试,当然也允许失败的线程放弃操作。基于这样的原理,CAS 操作即使没有锁,也可以发现其他线程对当前线程的干扰,并进行恰当的处理。
java.util.concurrent.atomic 包下的类大多是使用 CAS 操作来实现的 (AtomicInteger,AtomicBoolean,AtomicLong)。
面试官:CAS会导致什么问题?
- ABA 问题:
比如说一个线程 one 从内存位置 V 中取出 A,这时候另一个线程 two 也从内存中取出 A,并且 two 进行了一些操作变成了 B,然后 two 又将 V 位置的数据变成 A,这时候线程 one 进行 CAS 操作发现内存中仍然是 A,然后 one 操作成功。尽管线程 one 的 CAS 操作成功,但可能存在潜藏的问题。从 Java1.5 开始 JDK 的 atomic 包里提供了一个类 AtomicStampedReference 来解决 ABA 问题。
- 循环时间长开销大:
对于资源竞争严重(线程冲突严重)的情况,CAS 自旋的概率会比较大,从而浪费更多的 CPU 资源,效率低于 synchronized。
- 只能保证一个共享变量的原子操作:
当对一个共享变量执行操作时,我们可以使用循环 CAS 的方式来保证原子操作,但是对多个共享变量操作时,循环 CAS 就无法保证操作的原子性,这个时候就可以用锁。
面试官:能说一下说下ReentrantLock原理吗
ReentrantLock 是基于 Lock 实现的可重入锁,所有的 Lock 都是基于 AQS 实现的,AQS 和 Condition 各自维护不同的对象,在使用 Lock 和 Condition 时,其实就是两个队列的互相移动。它所提供的共享锁、互斥锁都是基于对 state 的操作。
面试官:能说一下AQS吗
AbstractQueuedSynchronizer,抽象的队列式的同步器,AQS 定义了一套多线程访问共享资源的同步器框架,许多同步类实现都依赖于它,如常用的
ReentrantLock/Semaphore/CountDownLatch。
AQS 核⼼思想是,如果被请求的共享资源空闲,则将当前请求资源的线程设置为有效的⼯作线程,并且将共享资源设置为锁定状态。如果被请求的共享资源被占⽤,那么就需要⼀套线程阻塞等待以及被唤醒时锁分配的机制,这个机制 AQS 是⽤ CLH 队列锁实现的,即将暂时获取不到锁的线程加⼊到队列中。
看个 AQS原理图:
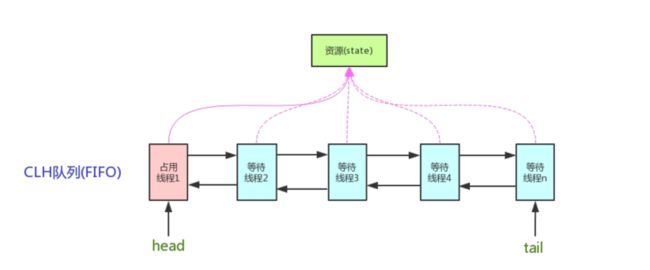
AQS 使⽤⼀个 int 成员变量来表示同步状态,通过内置的 FIFO 队列来完成获取资源线程的排队⼯作。AQS 使⽤ CAS 对该同步状态进⾏原⼦操作实现对其值的修改。
private volatile int state;//共享变量,使⽤volatile修饰保证线程可⻅性
状态信息通过 protected 类型的 getState,setState,compareAndSetState 进⾏操作
//返回同步状态的当前值
protected final int getState() {
return state; }
// 设置同步状态的值
protected final void setState(int newState) {
state = newState; }
//原⼦地(CAS操作)将同步状态值设置为给定值update如果当前同步状态的值等于expect(期望值)
protected final boolean compareAndSetState(int expect, int update) {
return unsafe.compareAndSwapInt(this, stateOffset, expect, update);
}
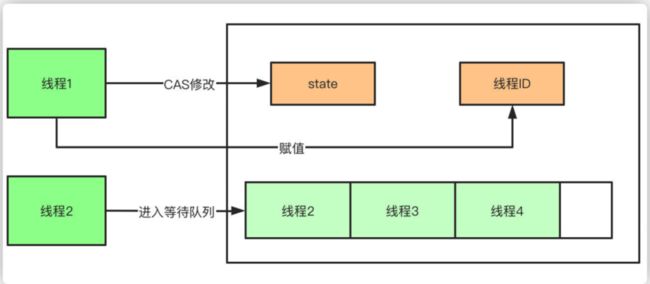
尝试加锁的时候通过CAS(CompareAndSwap)修改值,如果成功设置为1,并且把当前线程ID赋值,则代表加锁成功,⼀旦获取到锁,其他的线程将会被阻塞进⼊阻塞队列⾃旋,获得锁的线程释放锁的时候将会唤醒阻塞队列中的线程,释放锁的时候则会把state重新置为0,同时当前线程ID置为空。
面试官:能说一下Semaphore/CountDownLatch/CyclicBarrier吗
- Semaphore(信号量)-允许多个线程同时访问: synchronized 和 ReentrantLock 都是一次只允许一个线程访问某个资源,Semaphore(信号量)可以指定多个线程同时访问某个资源。
- CountDownLatch(倒计时器): CountDownLatch是一个同步工具类,用来协调多个线程之间的同步。这个工具通常用来控制线程等待,它可以让某一个线程等待直到倒计时结束,再开始执行。
- CyclicBarrier(循环栅栏): CyclicBarrier 和 CountDownLatch 非常类似,它也可以实现线程间的技术等待,但是它的功能比 CountDownLatch 更加复杂和强大。主要应用场景和 CountDownLatch 类似。CyclicBarrier 的字面意思是可循环使用(Cyclic)的屏障(Barrier)。它要做的事情是,让一组线程到达一个屏障(也可以叫同步点)时被阻塞,直到最后一个线程到达屏障时,屏障才会开门,所有被屏障拦截的线程才会继续干活。CyclicBarrier默认的构造方法是 CyclicBarrier(int parties),其参数表示屏障拦截的线程数量,每个线程调用await()方法告诉 CyclicBarrier 我已经到达了屏障,然后当前线程被阻塞。
volatile原理知道吗?
相⽐synchronized的加锁⽅式来解决共享变量的内存可⻅性问题,volatile就是更轻量的选择,他没有上下⽂切换的额外开销成本。使⽤volatile声明的变量,可以确保值被更新的时候对其他线程⽴刻可⻅。
volatile使⽤内存屏障来保证不会发⽣指令重排,解决了内存可⻅性的问题。
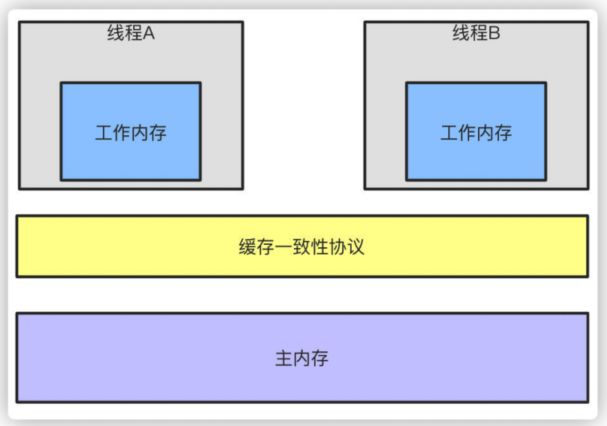
我们知道,线程都是从主内存中读取共享变量到⼯作内存来操作,完成之后再把结果写会主内存,但是这样就会带来可⻅性问题。举个例⼦,假设现在我们是两级缓存的双核CPU架构,包含L1、L2两级缓存。
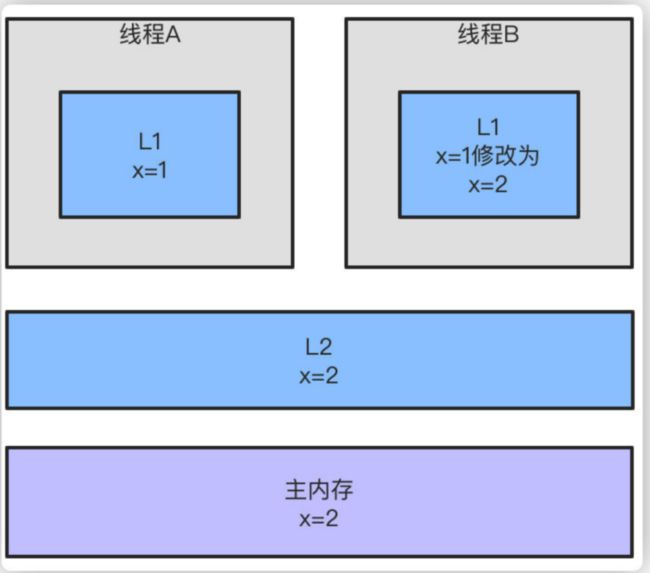
那么,如果X变量⽤volatile修饰的话,当线程A再次读取变量X的话,CPU就会根据缓存⼀致性协议强制线程A重新从主内存加载最新的值到⾃⼰的⼯作内存,⽽不是直接⽤缓存中的值。
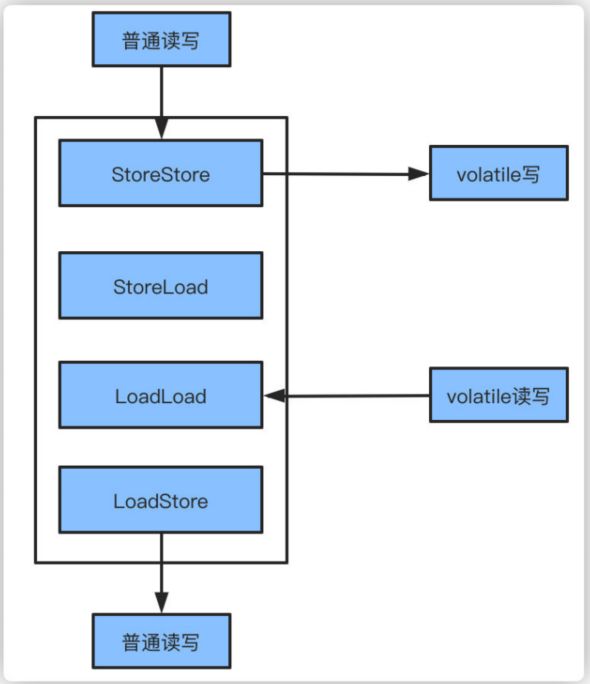
再来说内存屏障的问题,volatile修饰之后会加⼊不同的内存屏障来保证可⻅性的问题能正确执⾏。这⾥写的屏障基于书中提供的内容,但是实际上由于CPU架构不同,重排序的策略不同,提供的内存屏障也不⼀样,⽐如x86平台上,只有StoreLoad⼀种内存屏障。
-
StoreStore屏障,保证上⾯的普通写不和volatile写发⽣重排序
-
StoreLoad屏障,保证volatile写与后⾯可能的volatile读写不发⽣重排序
-
LoadLoad屏障,禁⽌volatile读与后⾯的普通读重排序
-
LoadStore屏障,禁⽌volatile读和后⾯的普通写重排序
面试官:说说你对Java内存模型(JMM)的理解,为什么要用JMM
本身随着CPU和内存的发展速度差异的问题,导致CPU的速度远快于内存,所以现在的CPU加⼊了⾼速缓存,⾼速缓存⼀般可以分为L1、L2、L3三级缓存。基于上⾯的例⼦我们知道了这导致了缓存⼀致性的问题,所以加⼊了缓存⼀致性协议,同时导致了内存可⻅性的问题,⽽编译器和CPU的重排序导致了原⼦性和有序性的问题,JMM内存模型正是对多线程操作下的⼀系列规范约束,通过JMM我们才屏蔽了不同硬件和操作系统内存的访问差异,这样保证了Java程序在不同的平台下达到⼀致的内存访问效果,同时也是保证在⾼效并发的时候程序能够正确执⾏。
面试官:看你用到了线程池,能说说为什么吗
- 提高线程的利用率,降低资源的消耗。
- 提高响应速度,线程的创建时间为T1,执行时间T2,销毁时间T3,用线程池可以免去T1和T3的时间。
- 便于统一管理线程对象
- 可控制最大并发数
面试官:能说一下线程池的核心参数吗?
来看一ThreadPoolExecutor的构造方法:
public ThreadPoolExecutor(int corePoolSize,
int maximumPoolSize,
long keepAliveTime,
TimeUnit unit,
BlockingQueue<Runnable> workQueue,
ThreadFactory threadFactory,
RejectedExecutionHandler handler)
-
核⼼线程数corePoolSize :此值是用来初始化线程池中核心线程数,当线程池中线程池数<
corePoolSize时,系统默认是添加一个任务才创建一个线程池。可以通过调用prestartAllCoreThreads方法一次性的启动corePoolSize个数的线程。当线程数 = corePoolSize时,新任务会追加到workQueue中。 -
允许的最大线程数maximumPoolSize:
maximumPoolSize表示允许的最大线程数 = (非核心线程数+核心线程数),当BlockingQueue也满了,但线程池中总线程数 <maximumPoolSize时候就会再次创建新的线程。 -
活跃时间keepAliveTime:非核心线程 =(maximumPoolSize - corePoolSize ) ,非核心线程闲置下来不干活最多存活时间。
-
保持存活时间unit:线程池中非核心线程保持存活的时间
-
等待队列workQueue:线程池 等待队列,维护着等待执行的
Runnable对象。当运行当线程数= corePoolSize时,新的任务会被添加到workQueue中,如果workQueue也满了则尝试用非核心线程执行任务 -
线程工厂 threadFactory:创建一个新线程时使用的工厂,可以用来设定线程名、是否为daemon线程等等。
-
拒绝策略RejectedExecutionHandler:
corePoolSize、workQueue、maximumPoolSize都不可用的时候执行的 饱和策略。
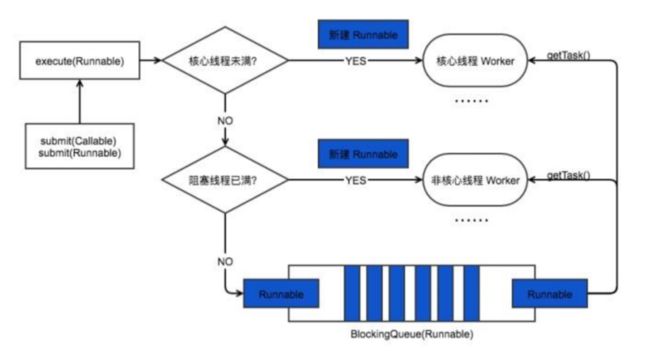
面试官:完整说一下线程池的工作流程
-
线程池刚创建时,里面没有一个线程。任务队列是作为参数传进来的。不过,就算队列里面有任务,线程池也不会马上执行它们。
-
当调用 execute() 方法添加一个任务时,线程池会做如下判断:
-
a) 如果正在运行的线程数量小于 corePoolSize,那么马上创建线程运行这个任务;
-
b) 如果正在运行的线程数量大于或等于 corePoolSize,那么将这个任务放入队列;
-
c) 如果这时候队列满了,而且正在运行的线程数量小于 maximumPoolSize,那么还是要创建非核心线程立刻运行这个任务;
-
d) 如果队列满了,而且正在运行的线程数量大于或等于 maximumPoolSize,那么线程池会根据拒绝策略来对应处理。
-
当一个线程完成任务时,它会从队列中取下一个任务来执行。
-
当一个线程无事可做,超过一定的时间(keepAliveTime)时,线程池会判断,如果当前运行的线程数大于 corePoolSize,那么这个线程就被停掉。所以线程池的所有任务完成后,它最终会收缩到 corePoolSize 的大小。
面试官:拒绝策略有哪些
主要有4种拒绝策略:
-
AbortPolicy:直接丢弃任务,抛出异常,这是默认策略
-
CallerRunsPolicy:只⽤调⽤者所在的线程来处理任务
-
DiscardOldestPolicy:丢弃等待队列中最旧的任务,并执⾏当前任务
-
DiscardPolicy:直接丢弃任务,也不抛出异常
面试官:说一下你的核心线程数是怎么选的
线程在Java中属于稀缺资源,线程池不是越大越好也不是越小越好。任务分为计算密集型、IO密集型、混合型。
- 计算密集型一般推荐线程池不要过大,一般是CPU数 + 1,+1是因为可能存在页缺失(就是可能存在有些数据在硬盘中需要多来一个线程将数据读入内存)。如果线程池数太大,可能会频繁的 进行线程上下文切换跟任务调度。获得当前CPU核心数代码如下:
Runtime.getRuntime().availableProcessors();
- IO密集型:线程数适当大一点,机器的Cpu核心数*2。
- 混合型:如果密集型站大头则拆分的必要性不大,如果IO型占据不少有必要,Mark 下。
面试官:说一下有哪些常见阻塞队列
-
ArrayBlockingQueue :由数组结构组成的有界阻塞队列。
-
LinkedBlockingQueue :由链表结构组成的有界阻塞队列。
-
PriorityBlockingQueue :支持优先级排序的无界阻塞队列。
-
DelayQueue:使用优先级队列实现的无界阻塞队列。
-
SynchronousQueue:不存储元素的阻塞队列。
-
LinkedTransferQueue:由链表结构组成的无界阻塞队列。
-
LinkedBlockingDeque:由链表结构组成的双向阻塞队列
面试官:说一下有哪几种常见的线程池吧
在上面我们直接用到了ThreadPoolExecutor的构造方法创建线程池,还有另一种方式,通过Executors 创建线程。
需要注意的是,阿里巴巴Java开发手册强制禁止使用Executors创建线程
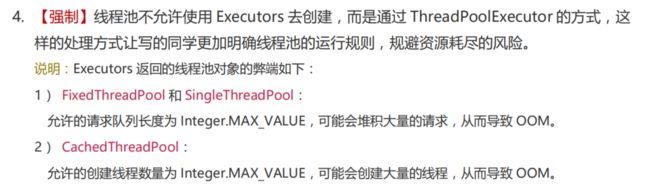
比较典型常见的四种线程池包括:newFixedThreadPool、 newSingleThreadExecutor 、 newCachedThreadPool、
newScheduledThreadPool。
FixedThreadPool
-
定长的线程池,有核心线程,核心线程的即为最大的线程数量,没有非核心线程。
-
使用的无界的等待队列是
LinkedBlockingQueue。使用时候有堵满等待队列的风险。

SingleThreadPool
只有一条线程来执行任务,适用于有顺序的任务的应用场景,也是用的无界等待队列

CachedThreadPool
可缓存的线程池,该线程池中没有核心线程,非核心线程的数量为Integer.max_value,就是无限大,当有需要时创建线程来执行任务,没有需要时回收线程,适用于耗时少,任务量大的情况。任务队列用的是SynchronousQueue如果生产多快消费慢,则会导致创建很多线程需注意。

ScheduledThreadPoolExecutor
周期性执行任务的线程池,按照某种特定的计划执行线程中的任务,有核心线程,但也有非核心线程,非核心线程的大小也为无限大。适用于执行周期性的任务。
看构造函数:调用的还是ThreadPoolExecutor构造函数,区别不同点在于任务队列是用的DelayedWorkQueue。

- 面试官:这些题都能回答出来,很好,小伙子,很有精神!
- 老三:谢谢。那面试官老师,你看这一轮面试……
- 面试官:虽然你答的很好,但你的项目数据量只有十万级,不符合我们的要求。所以,面试不能让你过。
老三上去就是一个左刺拳,再接一个右正蹬……
- 面试官:啊……年轻人不讲武德,来偷袭……
代码地址:https://gitee.com/fighter3/thread-demo.git
好了,通过本文,相信你对多线程的应用和原理都有了一定的了解。文章开头提到的crud仔就是博主本人了,技术水平有限,难免错漏,欢迎指出,谢谢!
参考:
【1】:使用多线程查询百万条用户数据将汉字转化成拼音
【2】:讲真 这次绝对让你轻松学习线程池
【3】:SpringBoot学习笔记(十七:异步调用)
【4】:JavaGuide编著《JavaGuide面试突击版》
【5】:艾小仙编著 《我想进大厂面试总结》
【6】:佚名编著 《Java核心知识点整理》
【7】:Java并发基础知识,我用思维导图整理好了
【8】:并发编程的锁机制:synchronized和lock
【9】:详解synchronized与Lock的区别与使用
【10】:bugstack小傅哥编著《Java面经手册》