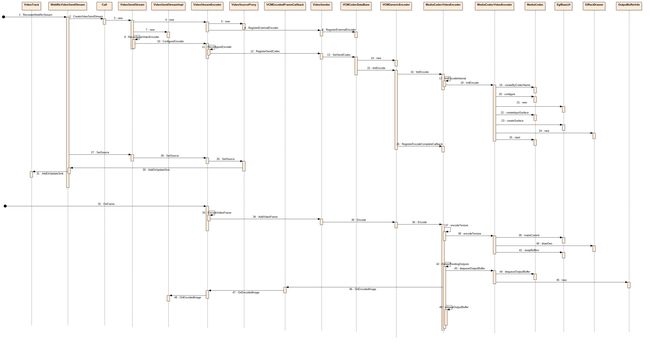
在webrtc源码分析之视频编码之一分析了视频编码初始化流程,接下来分析一下视频编码流程,如下图所示,视频编码流程是从VideoBroadcaster回调VideoStreamEncoder的OnFrame开始的。
VideoStreamEncoder的OnFrame定义如下:
void VideoStreamEncoder::OnFrame(const VideoFrame& video_frame) {
RTC_DCHECK_RUNS_SERIALIZED(&incoming_frame_race_checker_);
VideoFrame incoming_frame = video_frame;
// Local time in webrtc time base.
int64_t current_time_us = clock_->TimeInMicroseconds();
int64_t current_time_ms = current_time_us / rtc::kNumMicrosecsPerMillisec;
// In some cases, e.g., when the frame from decoder is fed to encoder,
// the timestamp may be set to the future. As the encoding pipeline assumes
// capture time to be less than present time, we should reset the capture
// timestamps here. Otherwise there may be issues with RTP send stream.
if (incoming_frame.timestamp_us() > current_time_us)
incoming_frame.set_timestamp_us(current_time_us);
// Capture time may come from clock with an offset and drift from clock_.
int64_t capture_ntp_time_ms;
if (video_frame.ntp_time_ms() > 0) {
capture_ntp_time_ms = video_frame.ntp_time_ms();
} else if (video_frame.render_time_ms() != 0) {
capture_ntp_time_ms = video_frame.render_time_ms() + delta_ntp_internal_ms_;
} else {
capture_ntp_time_ms = current_time_ms + delta_ntp_internal_ms_;
}
incoming_frame.set_ntp_time_ms(capture_ntp_time_ms);
// Convert NTP time, in ms, to RTP timestamp.
const int kMsToRtpTimestamp = 90;
incoming_frame.set_timestamp(
kMsToRtpTimestamp * static_cast(incoming_frame.ntp_time_ms()));
if (incoming_frame.ntp_time_ms() <= last_captured_timestamp_) {
// We don't allow the same capture time for two frames, drop this one.
RTC_LOG(LS_WARNING) << "Same/old NTP timestamp ("
<< incoming_frame.ntp_time_ms()
<< " <= " << last_captured_timestamp_
<< ") for incoming frame. Dropping.";
return;
}
bool log_stats = false;
if (current_time_ms - last_frame_log_ms_ > kFrameLogIntervalMs) {
last_frame_log_ms_ = current_time_ms;
log_stats = true;
}
last_captured_timestamp_ = incoming_frame.ntp_time_ms();
encoder_queue_.PostTask(std::unique_ptr(new EncodeTask(
incoming_frame, this, rtc::TimeMicros(), log_stats)));
}
EncodeTask的Run定义如下:
bool Run() override {
RTC_DCHECK_RUN_ON(&video_stream_encoder_->encoder_queue_);
video_stream_encoder_->stats_proxy_->OnIncomingFrame(frame_.width(),
frame_.height());
++video_stream_encoder_->captured_frame_count_;
const int posted_frames_waiting_for_encode =
video_stream_encoder_->posted_frames_waiting_for_encode_.fetch_sub(1);
RTC_DCHECK_GT(posted_frames_waiting_for_encode, 0);
if (posted_frames_waiting_for_encode == 1) {
video_stream_encoder_->EncodeVideoFrame(frame_, time_when_posted_us_);
} else {
// There is a newer frame in flight. Do not encode this frame.
RTC_LOG(LS_VERBOSE)
<< "Incoming frame dropped due to that the encoder is blocked.";
++video_stream_encoder_->dropped_frame_count_;
video_stream_encoder_->stats_proxy_->OnFrameDroppedInEncoderQueue();
}
if (log_stats_) {
RTC_LOG(LS_INFO) << "Number of frames: captured "
<< video_stream_encoder_->captured_frame_count_
<< ", dropped (due to encoder blocked) "
<< video_stream_encoder_->dropped_frame_count_
<< ", interval_ms " << kFrameLogIntervalMs;
video_stream_encoder_->captured_frame_count_ = 0;
video_stream_encoder_->dropped_frame_count_ = 0;
}
return true;
}
成员video_stream_encoder_是一个VideoStreamEncoder对象,EncodeVideoFrame函数定义如下:
void VideoStreamEncoder::EncodeVideoFrame(const VideoFrame& video_frame,
int64_t time_when_posted_us) {
RTC_DCHECK_RUN_ON(&encoder_queue_);
if (pre_encode_callback_)
pre_encode_callback_->OnFrame(video_frame);
if (!last_frame_info_ || video_frame.width() != last_frame_info_->width ||
video_frame.height() != last_frame_info_->height ||
video_frame.is_texture() != last_frame_info_->is_texture) {
pending_encoder_reconfiguration_ = true;
last_frame_info_ = rtc::Optional(VideoFrameInfo(
video_frame.width(), video_frame.height(), video_frame.is_texture()));
RTC_LOG(LS_INFO) << "Video frame parameters changed: dimensions="
<< last_frame_info_->width << "x"
<< last_frame_info_->height
<< ", texture=" << last_frame_info_->is_texture << ".";
}
if (initial_rampup_ < kMaxInitialFramedrop &&
video_frame.size() >
MaximumFrameSizeForBitrate(encoder_start_bitrate_bps_ / 1000)) {
RTC_LOG(LS_INFO) << "Dropping frame. Too large for target bitrate.";
AdaptDown(kQuality);
++initial_rampup_;
return;
}
initial_rampup_ = kMaxInitialFramedrop;
int64_t now_ms = clock_->TimeInMilliseconds();
if (pending_encoder_reconfiguration_) {
ReconfigureEncoder();
last_parameters_update_ms_.emplace(now_ms);
} else if (!last_parameters_update_ms_ ||
now_ms - *last_parameters_update_ms_ >=
vcm::VCMProcessTimer::kDefaultProcessIntervalMs) {
video_sender_.UpdateChannelParemeters(rate_allocator_.get(),
bitrate_observer_);
last_parameters_update_ms_.emplace(now_ms);
}
if (EncoderPaused()) {
TraceFrameDropStart();
return;
}
TraceFrameDropEnd();
VideoFrame out_frame(video_frame);
// Crop frame if needed.
if (crop_width_ > 0 || crop_height_ > 0) {
int cropped_width = video_frame.width() - crop_width_;
int cropped_height = video_frame.height() - crop_height_;
rtc::scoped_refptr cropped_buffer =
I420Buffer::Create(cropped_width, cropped_height);
// TODO(ilnik): Remove scaling if cropping is too big, as it should never
// happen after SinkWants signaled correctly from ReconfigureEncoder.
if (crop_width_ < 4 && crop_height_ < 4) {
cropped_buffer->CropAndScaleFrom(
*video_frame.video_frame_buffer()->ToI420(), crop_width_ / 2,
crop_height_ / 2, cropped_width, cropped_height);
} else {
cropped_buffer->ScaleFrom(
*video_frame.video_frame_buffer()->ToI420().get());
}
out_frame =
VideoFrame(cropped_buffer, video_frame.timestamp(),
video_frame.render_time_ms(), video_frame.rotation());
out_frame.set_ntp_time_ms(video_frame.ntp_time_ms());
}
TRACE_EVENT_ASYNC_STEP0("webrtc", "Video", video_frame.render_time_ms(),
"Encode");
overuse_detector_->FrameCaptured(out_frame, time_when_posted_us);
video_sender_.AddVideoFrame(out_frame, nullptr);
}
有必要的话先裁剪缩放,然后调用VideoSender的AddVideoFrame函数,定义如下:
// Add one raw video frame to the encoder, blocking.
int32_t VideoSender::AddVideoFrame(const VideoFrame& videoFrame,
const CodecSpecificInfo* codecSpecificInfo) {
EncoderParameters encoder_params;
std::vector next_frame_types;
bool encoder_has_internal_source = false;
{
rtc::CritScope lock(¶ms_crit_);
encoder_params = encoder_params_;
next_frame_types = next_frame_types_;
encoder_has_internal_source = encoder_has_internal_source_;
}
rtc::CritScope lock(&encoder_crit_);
if (_encoder == nullptr)
return VCM_UNINITIALIZED;
SetEncoderParameters(encoder_params, encoder_has_internal_source);
if (_mediaOpt.DropFrame()) {
RTC_LOG(LS_VERBOSE) << "Drop Frame "
<< "target bitrate "
<< encoder_params.target_bitrate.get_sum_bps()
<< " loss rate " << encoder_params.loss_rate << " rtt "
<< encoder_params.rtt << " input frame rate "
<< encoder_params.input_frame_rate;
post_encode_callback_->OnDroppedFrame(
EncodedImageCallback::DropReason::kDroppedByMediaOptimizations);
return VCM_OK;
}
// TODO(pbos): Make sure setting send codec is synchronized with video
// processing so frame size always matches.
if (!_codecDataBase.MatchesCurrentResolution(videoFrame.width(),
videoFrame.height())) {
RTC_LOG(LS_ERROR)
<< "Incoming frame doesn't match set resolution. Dropping.";
return VCM_PARAMETER_ERROR;
}
VideoFrame converted_frame = videoFrame;
const VideoFrameBuffer::Type buffer_type =
converted_frame.video_frame_buffer()->type();
const bool is_buffer_type_supported =
buffer_type == VideoFrameBuffer::Type::kI420 ||
(buffer_type == VideoFrameBuffer::Type::kNative &&
_encoder->SupportsNativeHandle());
if (!is_buffer_type_supported) {
// This module only supports software encoding.
// TODO(pbos): Offload conversion from the encoder thread.
rtc::scoped_refptr converted_buffer(
converted_frame.video_frame_buffer()->ToI420());
if (!converted_buffer) {
RTC_LOG(LS_ERROR) << "Frame conversion failed, dropping frame.";
return VCM_PARAMETER_ERROR;
}
converted_frame = VideoFrame(converted_buffer,
converted_frame.timestamp(),
converted_frame.render_time_ms(),
converted_frame.rotation());
}
int32_t ret =
_encoder->Encode(converted_frame, codecSpecificInfo, next_frame_types);
if (ret < 0) {
RTC_LOG(LS_ERROR) << "Failed to encode frame. Error code: " << ret;
return ret;
}
{
rtc::CritScope lock(¶ms_crit_);
// Change all keyframe requests to encode delta frames the next time.
for (size_t i = 0; i < next_frame_types_.size(); ++i) {
// Check for equality (same requested as before encoding) to not
// accidentally drop a keyframe request while encoding.
if (next_frame_types[i] == next_frame_types_[i])
next_frame_types_[i] = kVideoFrameDelta;
}
}
return VCM_OK;
}
成员_encoder是一个VCMGenericEncoder对象,Encode函数定义如下:
int32_t VCMGenericEncoder::Encode(const VideoFrame& frame,
const CodecSpecificInfo* codec_specific,
const std::vector& frame_types) {
RTC_DCHECK_RUNS_SERIALIZED(&race_checker_);
TRACE_EVENT1("webrtc", "VCMGenericEncoder::Encode", "timestamp",
frame.timestamp());
for (FrameType frame_type : frame_types)
RTC_DCHECK(frame_type == kVideoFrameKey || frame_type == kVideoFrameDelta);
for (size_t i = 0; i < streams_or_svc_num_; ++i)
vcm_encoded_frame_callback_->OnEncodeStarted(frame.timestamp(),
frame.render_time_ms(), i);
return encoder_->Encode(frame, codec_specific, &frame_types);
}
考虑encoder_为MediaCodecVideoEncoder的情况,Encode函数定义如下:
int32_t MediaCodecVideoEncoder::Encode(
const VideoFrame& frame,
const CodecSpecificInfo* /* codec_specific_info */,
const std::vector* frame_types) {
RTC_DCHECK_CALLED_SEQUENTIALLY(&encoder_queue_checker_);
if (sw_fallback_required_)
return WEBRTC_VIDEO_CODEC_FALLBACK_SOFTWARE;
JNIEnv* jni = AttachCurrentThreadIfNeeded();
ScopedLocalRefFrame local_ref_frame(jni);
const int64_t frame_input_time_ms = rtc::TimeMillis();
if (!inited_) {
return WEBRTC_VIDEO_CODEC_UNINITIALIZED;
}
bool send_key_frame = false;
if (codec_mode_ == kRealtimeVideo) {
++frames_received_since_last_key_;
int64_t now_ms = rtc::TimeMillis();
if (last_frame_received_ms_ != -1 &&
(now_ms - last_frame_received_ms_) > kFrameDiffThresholdMs) {
// Add limit to prevent triggering a key for every frame for very low
// framerates (e.g. if frame diff > kFrameDiffThresholdMs).
if (frames_received_since_last_key_ > kMinKeyFrameInterval) {
ALOGD << "Send key, frame diff: " << (now_ms - last_frame_received_ms_);
send_key_frame = true;
}
frames_received_since_last_key_ = 0;
}
last_frame_received_ms_ = now_ms;
}
frames_received_++;
if (!DeliverPendingOutputs(jni)) {
if (!ProcessHWError(true /* reset_if_fallback_unavailable */)) {
return sw_fallback_required_ ? WEBRTC_VIDEO_CODEC_FALLBACK_SOFTWARE
: WEBRTC_VIDEO_CODEC_ERROR;
}
}
if (frames_encoded_ < kMaxEncodedLogFrames) {
ALOGD << "Encoder frame in # " << (frames_received_ - 1)
<< ". TS: " << static_cast(current_timestamp_us_ / 1000)
<< ". Q: " << input_frame_infos_.size() << ". Fps: " << last_set_fps_
<< ". Kbps: " << last_set_bitrate_kbps_;
}
if (drop_next_input_frame_) {
ALOGW << "Encoder drop frame - failed callback.";
drop_next_input_frame_ = false;
current_timestamp_us_ += rtc::kNumMicrosecsPerSec / last_set_fps_;
frames_dropped_media_encoder_++;
return WEBRTC_VIDEO_CODEC_OK;
}
RTC_CHECK(frame_types->size() == 1) << "Unexpected stream count";
// Check if we accumulated too many frames in encoder input buffers and drop
// frame if so.
if (input_frame_infos_.size() > MAX_ENCODER_Q_SIZE) {
ALOGD << "Already " << input_frame_infos_.size()
<< " frames in the queue, dropping"
<< ". TS: " << static_cast(current_timestamp_us_ / 1000)
<< ". Fps: " << last_set_fps_
<< ". Consecutive drops: " << consecutive_full_queue_frame_drops_;
current_timestamp_us_ += rtc::kNumMicrosecsPerSec / last_set_fps_;
consecutive_full_queue_frame_drops_++;
if (consecutive_full_queue_frame_drops_ >=
ENCODER_STALL_FRAMEDROP_THRESHOLD) {
ALOGE << "Encoder got stuck.";
return ProcessHWErrorOnEncode();
}
frames_dropped_media_encoder_++;
return WEBRTC_VIDEO_CODEC_OK;
}
consecutive_full_queue_frame_drops_ = 0;
rtc::scoped_refptr input_buffer(frame.video_frame_buffer());
VideoFrame input_frame(input_buffer, frame.timestamp(),
frame.render_time_ms(), frame.rotation());
if (!MaybeReconfigureEncoder(jni, input_frame)) {
ALOGE << "Failed to reconfigure encoder.";
return WEBRTC_VIDEO_CODEC_ERROR;
}
const bool key_frame =
frame_types->front() != kVideoFrameDelta || send_key_frame;
bool encode_status = true;
int j_input_buffer_index = -1;
if (!use_surface_) {
j_input_buffer_index = Java_MediaCodecVideoEncoder_dequeueInputBuffer(
jni, j_media_codec_video_encoder_);
if (CheckException(jni)) {
ALOGE << "Exception in dequeu input buffer.";
return ProcessHWErrorOnEncode();
}
if (j_input_buffer_index == -1) {
// Video codec falls behind - no input buffer available.
ALOGW << "Encoder drop frame - no input buffers available";
if (frames_received_ > 1) {
current_timestamp_us_ += rtc::kNumMicrosecsPerSec / last_set_fps_;
frames_dropped_media_encoder_++;
} else {
// Input buffers are not ready after codec initialization, HW is still
// allocating thme - this is expected and should not result in drop
// frame report.
frames_received_ = 0;
}
return WEBRTC_VIDEO_CODEC_OK; // TODO(fischman): see webrtc bug 2887.
} else if (j_input_buffer_index == -2) {
return ProcessHWErrorOnEncode();
}
}
if (input_frame.video_frame_buffer()->type() !=
VideoFrameBuffer::Type::kNative) {
encode_status =
EncodeByteBuffer(jni, key_frame, input_frame, j_input_buffer_index);
} else {
AndroidVideoFrameBuffer* android_buffer =
static_cast(
input_frame.video_frame_buffer().get());
switch (android_buffer->android_type()) {
case AndroidVideoFrameBuffer::AndroidType::kTextureBuffer:
encode_status = EncodeTexture(jni, key_frame, input_frame);
break;
case AndroidVideoFrameBuffer::AndroidType::kJavaBuffer:
encode_status =
EncodeJavaFrame(jni, key_frame, NativeToJavaFrame(jni, input_frame),
j_input_buffer_index);
break;
default:
RTC_NOTREACHED();
return WEBRTC_VIDEO_CODEC_ERROR;
}
}
if (!encode_status) {
ALOGE << "Failed encode frame with timestamp: " << input_frame.timestamp();
return ProcessHWErrorOnEncode();
}
// Save input image timestamps for later output.
input_frame_infos_.emplace_back(frame_input_time_ms, input_frame.timestamp(),
input_frame.render_time_ms(),
input_frame.rotation());
last_input_timestamp_ms_ =
current_timestamp_us_ / rtc::kNumMicrosecsPerMillisec;
current_timestamp_us_ += rtc::kNumMicrosecsPerSec / last_set_fps_;
// Start the polling loop if it is not started.
if (encode_task_) {
rtc::TaskQueue::Current()->PostDelayedTask(std::move(encode_task_),
kMediaCodecPollMs);
}
if (!DeliverPendingOutputs(jni)) {
return ProcessHWErrorOnEncode();
}
return WEBRTC_VIDEO_CODEC_OK;
}
考虑use_surface_为true的情况,调用java层MediaCodecVideoEncoder的encodeTexture函数,定义如下:
@CalledByNativeUnchecked
boolean encodeTexture(boolean isKeyframe, int oesTextureId, float[] transformationMatrix,
long presentationTimestampUs) {
checkOnMediaCodecThread();
try {
checkKeyFrameRequired(isKeyframe, presentationTimestampUs);
eglBase.makeCurrent();
// TODO(perkj): glClear() shouldn't be necessary since every pixel is covered anyway,
// but it's a workaround for bug webrtc:5147.
GLES20.glClear(GLES20.GL_COLOR_BUFFER_BIT);
drawer.drawOes(oesTextureId, transformationMatrix, width, height, 0, 0, width, height);
eglBase.swapBuffers(TimeUnit.MICROSECONDS.toNanos(presentationTimestampUs));
return true;
} catch (RuntimeException e) {
Logging.e(TAG, "encodeTexture failed", e);
return false;
}
}
通过opengl方式往MediaCodec的输入Surface绘制,将图像数据送到OMX进行编码。
然后调用DeliverPendingOutputs函数,定义如下:
bool MediaCodecVideoEncoder::DeliverPendingOutputs(JNIEnv* jni) {
RTC_DCHECK_CALLED_SEQUENTIALLY(&encoder_queue_checker_);
while (true) {
ScopedJavaLocalRef j_output_buffer_info =
Java_MediaCodecVideoEncoder_dequeueOutputBuffer(
jni, j_media_codec_video_encoder_);
if (CheckException(jni)) {
ALOGE << "Exception in set dequeue output buffer.";
ProcessHWError(true /* reset_if_fallback_unavailable */);
return WEBRTC_VIDEO_CODEC_ERROR;
}
if (IsNull(jni, j_output_buffer_info)) {
break;
}
int output_buffer_index =
Java_OutputBufferInfo_getIndex(jni, j_output_buffer_info);
if (output_buffer_index == -1) {
ProcessHWError(true /* reset_if_fallback_unavailable */);
return false;
}
// Get key and config frame flags.
ScopedJavaLocalRef j_output_buffer =
Java_OutputBufferInfo_getBuffer(jni, j_output_buffer_info);
bool key_frame =
Java_OutputBufferInfo_isKeyFrame(jni, j_output_buffer_info);
// Get frame timestamps from a queue - for non config frames only.
int64_t encoding_start_time_ms = 0;
int64_t frame_encoding_time_ms = 0;
last_output_timestamp_ms_ =
Java_OutputBufferInfo_getPresentationTimestampUs(jni,
j_output_buffer_info) /
rtc::kNumMicrosecsPerMillisec;
if (!input_frame_infos_.empty()) {
const InputFrameInfo& frame_info = input_frame_infos_.front();
output_timestamp_ = frame_info.frame_timestamp;
output_render_time_ms_ = frame_info.frame_render_time_ms;
output_rotation_ = frame_info.rotation;
encoding_start_time_ms = frame_info.encode_start_time;
input_frame_infos_.pop_front();
}
// Extract payload.
size_t payload_size = jni->GetDirectBufferCapacity(j_output_buffer.obj());
uint8_t* payload = reinterpret_cast(
jni->GetDirectBufferAddress(j_output_buffer.obj()));
if (CheckException(jni)) {
ALOGE << "Exception in get direct buffer address.";
ProcessHWError(true /* reset_if_fallback_unavailable */);
return WEBRTC_VIDEO_CODEC_ERROR;
}
// Callback - return encoded frame.
const VideoCodecType codec_type = GetCodecType();
EncodedImageCallback::Result callback_result(
EncodedImageCallback::Result::OK);
if (callback_) {
std::unique_ptr image(
new EncodedImage(payload, payload_size, payload_size));
image->_encodedWidth = width_;
image->_encodedHeight = height_;
image->_timeStamp = output_timestamp_;
image->capture_time_ms_ = output_render_time_ms_;
image->rotation_ = output_rotation_;
image->content_type_ = (codec_mode_ == VideoCodecMode::kScreensharing)
? VideoContentType::SCREENSHARE
: VideoContentType::UNSPECIFIED;
image->timing_.flags = TimingFrameFlags::kInvalid;
image->_frameType = (key_frame ? kVideoFrameKey : kVideoFrameDelta);
image->_completeFrame = true;
CodecSpecificInfo info;
memset(&info, 0, sizeof(info));
info.codecType = codec_type;
if (codec_type == kVideoCodecVP8) {
info.codecSpecific.VP8.pictureId = picture_id_;
info.codecSpecific.VP8.nonReference = false;
info.codecSpecific.VP8.simulcastIdx = 0;
info.codecSpecific.VP8.temporalIdx = kNoTemporalIdx;
info.codecSpecific.VP8.layerSync = false;
info.codecSpecific.VP8.tl0PicIdx = kNoTl0PicIdx;
info.codecSpecific.VP8.keyIdx = kNoKeyIdx;
} else if (codec_type == kVideoCodecVP9) {
if (key_frame) {
gof_idx_ = 0;
}
info.codecSpecific.VP9.picture_id = picture_id_;
info.codecSpecific.VP9.inter_pic_predicted = key_frame ? false : true;
info.codecSpecific.VP9.flexible_mode = false;
info.codecSpecific.VP9.ss_data_available = key_frame ? true : false;
info.codecSpecific.VP9.tl0_pic_idx = tl0_pic_idx_++;
info.codecSpecific.VP9.temporal_idx = kNoTemporalIdx;
info.codecSpecific.VP9.spatial_idx = kNoSpatialIdx;
info.codecSpecific.VP9.temporal_up_switch = true;
info.codecSpecific.VP9.inter_layer_predicted = false;
info.codecSpecific.VP9.gof_idx =
static_cast(gof_idx_++ % gof_.num_frames_in_gof);
info.codecSpecific.VP9.num_spatial_layers = 1;
info.codecSpecific.VP9.spatial_layer_resolution_present = false;
if (info.codecSpecific.VP9.ss_data_available) {
info.codecSpecific.VP9.spatial_layer_resolution_present = true;
info.codecSpecific.VP9.width[0] = width_;
info.codecSpecific.VP9.height[0] = height_;
info.codecSpecific.VP9.gof.CopyGofInfoVP9(gof_);
}
}
picture_id_ = (picture_id_ + 1) & 0x7FFF;
// Generate a header describing a single fragment.
RTPFragmentationHeader header;
memset(&header, 0, sizeof(header));
if (codec_type == kVideoCodecVP8 || codec_type == kVideoCodecVP9) {
header.VerifyAndAllocateFragmentationHeader(1);
header.fragmentationOffset[0] = 0;
header.fragmentationLength[0] = image->_length;
header.fragmentationPlType[0] = 0;
header.fragmentationTimeDiff[0] = 0;
if (codec_type == kVideoCodecVP8) {
int qp;
if (vp8::GetQp(payload, payload_size, &qp)) {
current_acc_qp_ += qp;
image->qp_ = qp;
}
} else if (codec_type == kVideoCodecVP9) {
int qp;
if (vp9::GetQp(payload, payload_size, &qp)) {
current_acc_qp_ += qp;
image->qp_ = qp;
}
}
} else if (codec_type == kVideoCodecH264) {
h264_bitstream_parser_.ParseBitstream(payload, payload_size);
int qp;
if (h264_bitstream_parser_.GetLastSliceQp(&qp)) {
current_acc_qp_ += qp;
image->qp_ = qp;
}
// For H.264 search for start codes.
const std::vector nalu_idxs =
H264::FindNaluIndices(payload, payload_size);
if (nalu_idxs.empty()) {
ALOGE << "Start code is not found!";
ALOGE << "Data:" << image->_buffer[0] << " " << image->_buffer[1]
<< " " << image->_buffer[2] << " " << image->_buffer[3]
<< " " << image->_buffer[4] << " " << image->_buffer[5];
ProcessHWError(true /* reset_if_fallback_unavailable */);
return false;
}
header.VerifyAndAllocateFragmentationHeader(nalu_idxs.size());
for (size_t i = 0; i < nalu_idxs.size(); i++) {
header.fragmentationOffset[i] = nalu_idxs[i].payload_start_offset;
header.fragmentationLength[i] = nalu_idxs[i].payload_size;
header.fragmentationPlType[i] = 0;
header.fragmentationTimeDiff[i] = 0;
}
}
callback_result = callback_->OnEncodedImage(*image, &info, &header);
}
// Return output buffer back to the encoder.
bool success = Java_MediaCodecVideoEncoder_releaseOutputBuffer(
jni, j_media_codec_video_encoder_, output_buffer_index);
if (CheckException(jni) || !success) {
ProcessHWError(true /* reset_if_fallback_unavailable */);
return false;
}
// Print per frame statistics.
if (encoding_start_time_ms > 0) {
frame_encoding_time_ms = rtc::TimeMillis() - encoding_start_time_ms;
}
if (frames_encoded_ < kMaxEncodedLogFrames) {
int current_latency = static_cast(last_input_timestamp_ms_ -
last_output_timestamp_ms_);
ALOGD << "Encoder frame out # " << frames_encoded_
<< ". Key: " << key_frame << ". Size: " << payload_size
<< ". TS: " << static_cast(last_output_timestamp_ms_)
<< ". Latency: " << current_latency
<< ". EncTime: " << frame_encoding_time_ms;
}
// Calculate and print encoding statistics - every 3 seconds.
frames_encoded_++;
current_frames_++;
current_bytes_ += payload_size;
current_encoding_time_ms_ += frame_encoding_time_ms;
LogStatistics(false);
// Errors in callback_result are currently ignored.
if (callback_result.drop_next_frame)
drop_next_input_frame_ = true;
}
return true;
}
DeliverPendingOutputs主要流程如下:
- 调用java层MediaCodecVideoEncoder的dequeueOutputBuffer函数从编码器取出数据,封装成OutputBufferInfo。
- 转换OutputBufferInfo为EncodedImage。
- 回调callback_的OnEncodedImage来分发EncodedImage,callback_成员是一个VCMEncodedFrameCallback对象,通过其OnEncodedImage最终将EncodedImage传给VideoSendStreamImpl,VideoSendStreamImpl的OnEncodedImage函数定义如下:
EncodedImageCallback::Result VideoSendStreamImpl::OnEncodedImage(
const EncodedImage& encoded_image,
const CodecSpecificInfo* codec_specific_info,
const RTPFragmentationHeader* fragmentation) {
// Encoded is called on whatever thread the real encoder implementation run
// on. In the case of hardware encoders, there might be several encoders
// running in parallel on different threads.
size_t simulcast_idx = 0;
if (codec_specific_info->codecType == kVideoCodecVP8) {
simulcast_idx = codec_specific_info->codecSpecific.VP8.simulcastIdx;
}
if (config_->post_encode_callback) {
config_->post_encode_callback->EncodedFrameCallback(EncodedFrame(
encoded_image._buffer, encoded_image._length, encoded_image._frameType,
simulcast_idx, encoded_image._timeStamp));
}
{
rtc::CritScope lock(&encoder_activity_crit_sect_);
if (check_encoder_activity_task_)
check_encoder_activity_task_->UpdateEncoderActivity();
}
protection_bitrate_calculator_.UpdateWithEncodedData(encoded_image);
EncodedImageCallback::Result result = payload_router_.OnEncodedImage(
encoded_image, codec_specific_info, fragmentation);
RTC_DCHECK(codec_specific_info);
int layer = codec_specific_info->codecType == kVideoCodecVP8
? codec_specific_info->codecSpecific.VP8.simulcastIdx
: 0;
{
rtc::CritScope lock(&ivf_writers_crit_);
if (file_writers_[layer].get()) {
bool ok = file_writers_[layer]->WriteFrame(
encoded_image, codec_specific_info->codecType);
RTC_DCHECK(ok);
}
}
return result;
}
payload_router_是一个PayloadRouter对象,在这里完成后续的RTP打包和传输的工作。