在讲隐马模型之前,首先要了解下,啥是马尔可夫模型。
马尔可夫模型
几个条件
- 当前状态只与前一个状态相关
- 一个状态到所有状态的转移概率和为1
- 概率大于等于0小于等于1
- 状态起始概率和为1
举个例子:
在文本中,假设有三个状态,名词n,动词v,形容词adj,三者之间的转移概率为(瞎编):
初始化概率为p(adj) = 0.5,p(n)=0.3,p(v)=0.2.
那么,一个文本词性为 形容词,名词,动词,名词的概率为:
相当于n-gram语言模型中,n = 2 的情况。
隐马尔可夫模型
在上述例子中,文本的词性是明确的,而隐马模型中,不知道所经历的状态序列,观察到的序列是随机的。所以,状态转换是随机的,观测序列也是随机的,双重随机过程。

举个例子:我 吃 饭。这里我们能够观测到的就是,‘我’,‘吃’,‘饭’。
那么‘我’对应的状态有‘动词’,‘名词’,‘形容词’,‘吃’,‘饭’同理。那么他们的背后词性序列,到底是 名动名,还是动动名,还是形动名不得而知。这种未知序列称之为隐状态。
所以:隐马模型三要素,一个是状态转移矩阵(同上),另一个是观测状态到隐藏状态的概率矩阵。还有一个起始状态概率。
隐马模型的三个问题
- 如何计算 观测序列O 的概率
- 如和计算 观测序列O 最优的隐状态序列
- 参数如何学习
问题一:
这样相当于是穷举所有可能。即,O1的状态概率O2的状态概率状态之间的概率转移。这样,状态一多,观测长度一长,计算将会指数增长。
为了优化求解时间,采用动态规划的思想,即O1,到O2,在计算O2,到O3,一次类推,最终计算到Ot.
那么复杂度即,O1有N个状态,O2有N个状态,那么计算O1到O2,就需要计算N*N 次,最终算得N个路径,通往O3,解释有点绕。总共t次。随意复杂度为。具体算法可以查看 前向算法。大概样子就是如下所示:
问题二:
一般在问题二在NLP的应用中较多,需要找到当前观测序列最优的标注。
如何快速的找到最优的序列。
维特比算法:
算法原理这里不做阐述。这篇博客讲的非常通俗易懂~
https://blog.csdn.net/athemeroy/article/details/79339546
算法实现:
首先需要一个隐马模型:
写了个随机函数,生成隐马模型
def hmmRamdon():
#隐状态个数
yin_num = 5
#观测概率个数
guan_num = 10
A = np.zeros((yin_num,yin_num))
for i in range(yin_num):
rows_h = np.random.random(yin_num)
rows_v = np.random.random(yin_num)
for k in range(i):
rows_h[k] = A[i][k]
rows_h[i:] = rows_h[i:] / rows_h[i:].sum() * (1 - rows_h[:i].sum())
A[i] = rows_h
for k in range(i+1):
rows_v[k] = A[k][i]
rows_v[i+1:] = rows_v[i+1:] / rows_v[i+1:].sum() * (1 - rows_v[:i+1].sum())
for j in range(yin_num):
A[j][i] = rows_v[j]
B = np.zeros((yin_num,guan_num))
for i in range(yin_num):
row = np.random.random(guan_num)
B[i] = row / row.sum()
init_yin = np.random.random(yin_num)
pai = init_yin / init_yin.sum()
return A,B,pai
函数没有做大于0校验~,随出负数的话记得多随几次哈~
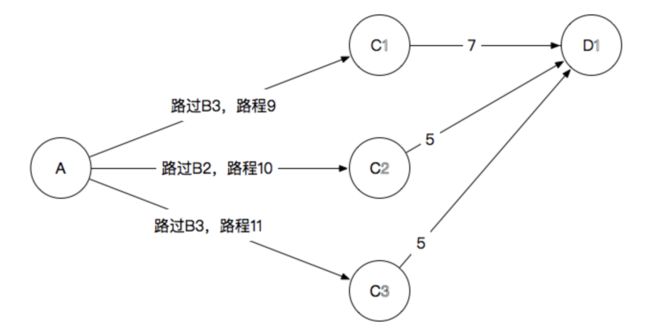
看过上述讲解维特比算法原理博客的同鞋,应该记得下图:

在HMM,中A->B相当于,观测序列的中 第一个序列,B1->B3是隐状态,
所以当前A->B的路径可以初始化为
这里展示方便,假设HMM模型为
A = np.array([[0.5,0.2,0.3],
[0.3,0.5,0.2],
[0.2,0.3,0.5]])
B = np.array([[0.5,0.5],
[0.4,0.6],
[0.7,0.3]])
pai = np.array([[0.2,0.4,0.4]])
observe = [0,1,0]
a_ex = B[:,observe[0]] * pai
a_ex = a_ex.T
all_way = np.full((yin_num, 1), -1)
print(a_ex)
print(all_way)
[[0.1 ]
[0.16]
[0.28]]
===========
[[-1]
[-1]
[-1]]
a_ex记录到达上一个观测状态每个隐状态最优的概率值。
observe[0]观测序列第一个,观测概率各自乘于初始化概率。all_way 用于记录每条路径经过的隐状态节点。0.1 = 0.5 * 0.2,0.16 = 0.4 * 0.4,0.28 = 0.7 * 0.4.
当计算由B->C时,C1,C2,C3 各自有三条路径,,结合A-B的路径,计算出A->C1概率最高的一条路径,同理计算到C2,C3的路径。
a_new = A1 *a_ex* B1[:,observe[1]]#计算图中9个路线
a_ex = np.amax(a_new,axis=0) #获取每个隐状态三个路径中最高的那一个
a_ex = a_ex.reshape(a_ex.shape[0],-1)
way = np.argmax(a_new,axis=0)#找出概率最高的三条路线
way = way.reshape(way.shape[0],-1)
all_way = np.hstack((all_way,way))#路径更新
a_new:
[[0.025 0.012 0.009 ]
[0.024 0.048 0.0096]
[0.028 0.0504 0.042 ]]
a_ex:
[[0.028 ]
[0.0504]
[0.042 ]]
all_way:
[[-1 2]
[-1 2]
[-1 2]]
所以对应图中的三条路径为A-B3-C1,A-B3-C2,A-B3-C3。
即博客中对应的图
如此循环直到最后一个。完整算法代码如下:
import numpy as np
def viterbi_search(A,B,pai,observe):
yin_num = A.shape[0]
for j in range(len(observe)):
if j == 0:
a_ex = B[:,observe[j]] * pai
a_ex = a_ex.T
all_way = np.full((yin_num, 1), -1)
else:
a_new = A1 *a_ex* B1[:,observe[j]]
a_ex = np.amax(a_new,axis=0)
a_ex = a_ex.reshape(a_ex.shape[0],-1)
way = np.argmax(a_new,axis=0)
way = way.reshape(way.shape[0],-1)
all_way = np.hstack((all_way,way))
result = np.append(all_way[a_ex.argmax()],a_ex.argmax())
return result, a_ex.max()
实验环境jupyter,实验代码下载链接:
链接:https://pan.baidu.com/s/1W9zckhKG3yssFeZtahl-5g 密码:78y5
问题三:参数估计
最大似然估计:
转移概率:aij = ai 到aj的次数 / ai到所有状态的次数。
观测概率:bi = ai 到 bi 观测的次数 / ai到所有观测的次数。
一般隐状态未知的情况下,可以用最大期望EM,对转移概率进行估计。