之前在ubuntu下安装了ros1的kinetic版本,用了有5个月了,也算是大部分操作都熟悉了。这两天考虑到ROS2出了也有一段时间,而且将来或许会对自己提供一定的帮助,所以想着在win10下搞个ROS2玩玩。
主要参考了以下两篇博客:
win10 安装 ros2.0---ROS Bouncy
Windows10下ROS2安装体验
其实主要按照官网的步骤来进行就好了,官网链接。
1.安装Chocolatey。
它的功能和ubuntu下的apt-get相似,能直接在windows下通过命令下载与管理软件包。习惯了apt-get以后发现这种功能真是方便的一匹。
安装过程呢,很简单,管理员模式打开cmd,运行指令
@"%SystemRoot%\System32\WindowsPowerShell\v1.0\powershell.exe" -NoProfile -InputFormat None -ExecutionPolicy Bypass -Command "iex ((New-Object System.Net.WebClient).DownloadString('https://chocolatey.org/install.ps1'))" && SET "PATH=%PATH%;%ALLUSERSPROFILE%\chocolatey\bin"
等待安装完成就好了。
2.通过刚才安装好的Chocolatey安装python
choco install -y python
3.安装OpenSSL
通过链接下载
在下图中找到Win64 OpenSSL v1.0.2,点击下载

下载完成后,按照默认步骤安装。安装完成后在cmd中运行指令:
setx -m OPENSSL_CONF C:\OpenSSL-Win64\bin\openssl.cfg
或者也可以在我的电脑-属性-高级系统设置-高级-环境变量中,在系统变量中新建一个变量OPENSSL_CONF,值设置为C:\OpenSSL-Win64\bin\openssl.cfg
设置完这个变量后,在变量Path中添加一个值:C:\OpenSSL-Win64\bin\
4.安装VS
这里有两种选择,如果使用Ardent 或者更早的版本,下载VS2015。如果使用Bouncy或之后的版本,下载VS2017。我打算使用Bouncy,所以下载了VS2017,还把原来电脑上的VS2015和VS2010全卸了,真是吃饱没事干- -。
安装过程这里就不再多说,相信网上看看都能看懂。
5.安装DDS
虽然官网上说可选但是我还是全都装了
a.Adlink OpenSplice
在这个链接中下载最新的对应自己VS和电脑位数的版本,下载完成后解压。并添加名为OSPL_HOME的系统环境变量,其值为release.bat文件所在的路径。
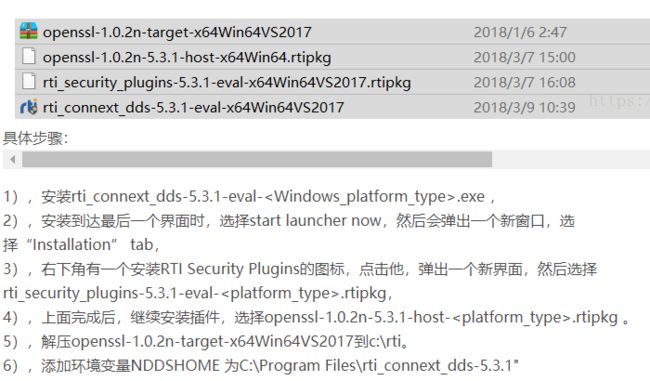
b.RTI Connext
到这个地址下,先注册一下,会给你的邮箱发一个License文件。然后点击链接下载。下载并解压完成后会有四个文件。接下来按如下步骤操作:
6.安装openCV
在这里下载openCV3.4.1并解压到C:\opencv,然后运行命令:
setx -m OpenCV_DIR C:\opencv
如果要用ardent 以及更早的版本,需要下载旧版本的openCV,这个。同样也要设置环境变量。
7.添加依赖
安装CMake:
choco install -y cmake
在环境变量Path中添加路径C:\Program Files\CMake\bin
然后到这里下载这四个包:
asio.1.12.1.nupkg
eigen-3.3.4.nupkg
tinyxml-usestl.2.6.2.nupkg
tinyxml2.6.0.0.nupkg
下载完成后,以管理员权限打开cmd,运行命令:
choco install -y -s
PATH\TO\DOWNLOADS\是你下载的这些包的存放路径。这里要注意上面的<>括号是不需要的,我一开始不知道就运行后一直显示:
拒绝访问。
结果因为这个搞了半天。
还要下载一些python的依赖。运行命令:
python -m pip install -U catkin_pkg empy git+https://github.com/lark-parser/[email protected] pyparsing pyyaml setuptools
还有rqt的依赖
python -m pip install -U pydot PyQt5
8.好了,前面的准备内容做完了,接下来可以开始下载ROS2了。
在这里下载相应的文件并解压到C:\dev\ros2下。
9.配置ROS2环境
打开cmd,运行命令:
call C:\dev\ros2\local_setup.bat
call "C:\opensplice69\HDE\x86_64.win64\release.bat"
这里就和ubuntu里的source命令是一个作用。
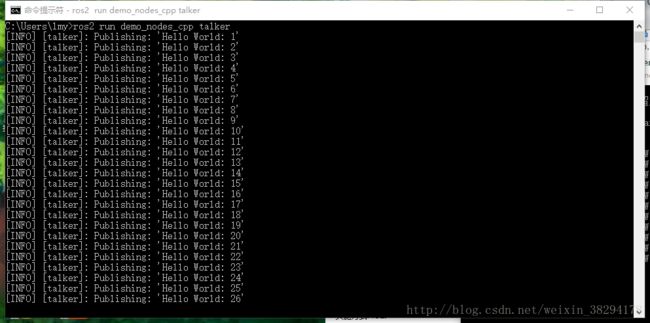
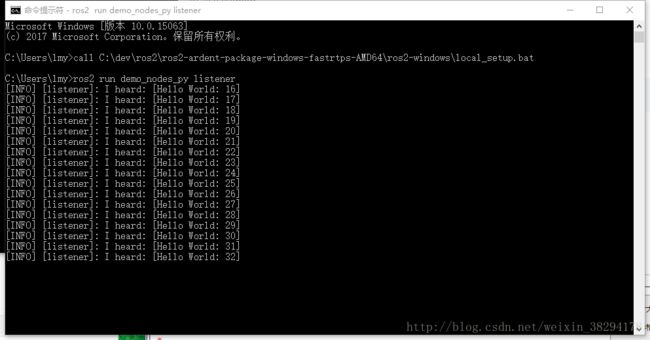
10.到这里就算是大功告成了。我们可以来试一个栗子。
打开两个cmd分别运行
ros2 run demo_nodes_cpp talker
ros2 run demo_nodes_py listener
可以得到
最后要说的是,在安装过程中一定要注意环境变量的设置,不要有遗漏,不然找起来还要花一番功夫。还有现在这种情况,每次打开cmd都需要call一下,之后的设置之后再说吧。总的说来,再win10下的安装还是蛮麻烦的,不过也不难,细心一点就好了。