直观数学-3blue1brown的动画制作
相信很多人都知道3Blue1Brown,这是一个由斯坦福大学的数学系学生Grant Sanderson 创建的YouTube 频道。该频道从独特的视觉角度解说高等数学,内容包括线性代数、微积分、神经网络、黎曼猜想、傅里叶变换以及四元数等等。
本人通过该视频频道获得了很多启发,同时也对其精良的视频制作技术产生了浓厚的兴趣。偶然的机会,得知其在Github上有专门开设了一个动画制作引擎:manim,地址在:
https://github.com/leekunhwee/manim https://github.com/leekunhwee/manim
https://github.com/leekunhwee/manim

3blue1brown制作的数学解析动画观点高,起点低,把非常复杂的数学原理讲述的非常生动形象,让没有太多数学基础的人也能够感受到数学的美感,今天我们就在UBUNTU18.04上,尝试安装一下3B1B的动画制作环境,说不定某天会用到。
安装环境:
- Ubuntu 18.04.5 LTS
- Anaconda Python 3.8.5

安装过程:
下载manim
git clone https://github.com/leekunhwee/manim.git
安装依赖,ffmpeg
这一步通过apt-get安装FFMPEG预编译包或者从源码开始编译都可以,从源码安装可以参考
ubuntu18.04编译FFMPEG_tugouxp的专栏-CSDN博客https://blog.csdn.net/tugouxp/article/details/115491843安装依赖,miktex
Getting MiKTeX
下载地址页面有安装说明,按照说明安装即可。
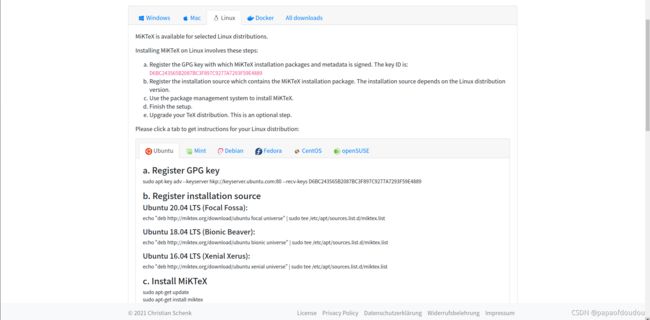

最后执行miktexsetup finish

验证安装依赖包的版本信息

安装python依赖包:
python -m pip install -r requirements.txt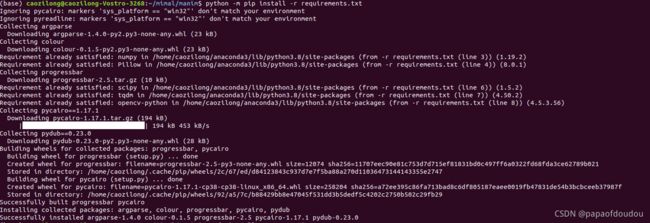
(base) caozilong@caozilong-Vostro-3268:~/mimal/manim$ python -m pip install -r requirements.txt
Ignoring pycairo: markers 'sys_platform == "win32"' don't match your environment
Ignoring pyreadline: markers 'sys_platform == "win32"' don't match your environment
Collecting argparse
Downloading argparse-1.4.0-py2.py3-none-any.whl (23 kB)
Collecting colour
Downloading colour-0.1.5-py2.py3-none-any.whl (23 kB)
Requirement already satisfied: numpy in /home/caozilong/anaconda3/lib/python3.8/site-packages (from -r requirements.txt (line 3)) (1.19.2)
Requirement already satisfied: Pillow in /home/caozilong/anaconda3/lib/python3.8/site-packages (from -r requirements.txt (line 4)) (8.0.1)
Collecting progressbar
Downloading progressbar-2.5.tar.gz (10 kB)
Requirement already satisfied: scipy in /home/caozilong/anaconda3/lib/python3.8/site-packages (from -r requirements.txt (line 6)) (1.5.2)
Requirement already satisfied: tqdm in /home/caozilong/anaconda3/lib/python3.8/site-packages (from -r requirements.txt (line 7)) (4.50.2)
Requirement already satisfied: opencv-python in /home/caozilong/anaconda3/lib/python3.8/site-packages (from -r requirements.txt (line 8)) (4.5.3.56)
Collecting pycairo==1.17.1
Downloading pycairo-1.17.1.tar.gz (194 kB)
|████████████████████████████████| 194 kB 453 kB/s
Collecting pydub==0.23.0
Downloading pydub-0.23.0-py2.py3-none-any.whl (28 kB)
Building wheels for collected packages: progressbar, pycairo
Building wheel for progressbar (setup.py) ... done
Created wheel for progressbar: filename=progressbar-2.5-py3-none-any.whl size=12074 sha256=11707eec90e81c753d7d715ef81831bd0c497ff6a0322fd68fda3ce62789b021
Stored in directory: /home/caozilong/.cache/pip/wheels/2c/67/ed/d84123843c937d7e7f5ba88a270d11036473144143355e2747
Building wheel for pycairo (setup.py) ... done
Created wheel for pycairo: filename=pycairo-1.17.1-cp38-cp38-linux_x86_64.whl size=258204 sha256=a72ee395c86fa713bad8c6df805187eaee0019fb47831de54b3bcbceeb37987f
Stored in directory: /home/caozilong/.cache/pip/wheels/92/a5/7c/b88429bb8e47045f531dd3b5dedf5c4202c2750b502c29fb29
Successfully built progressbar pycairo
Installing collected packages: argparse, colour, progressbar, pycairo, pydub
Successfully installed argparse-1.4.0 colour-0.1.5 progressbar-2.5 pycairo-1.17.1 pydub-0.23.0
(base) caozilong@caozilong-Vostro-3268:~/mimal/manim$ conda install pycairo
(base) caozilong@caozilong-Vostro-3268:~/mimal/manim$ conda install pycairo
Collecting package metadata (current_repodata.json): done
Solving environment: -
The environment is inconsistent, please check the package plan carefully
The following packages are causing the inconsistency:
- defaults/linux-64::anaconda==2020.11=py38_0
- defaults/linux-64::spyder==4.1.5=py38_0
- defaults/linux-64::astroid==2.4.2=py38_0
- defaults/noarch::python-language-server==0.35.1=py_0
- defaults/linux-64::pylint==2.6.0=py38\
done
## Package Plan ##
environment location: /home/caozilong/anaconda3
added / updated specs:
- pycairo
The following packages will be downloaded:
package | build
---------------------------|-----------------
_anaconda_depends-2020.07 | py38_0 6 KB
anaconda-custom | py38_1 35 KB
astroid-2.5 | py38h06a4308_1 284 KB
ca-certificates-2021.7.5 | h06a4308_1 113 KB
certifi-2021.5.30 | py38h06a4308_0 138 KB
conda-4.10.3 | py38h06a4308_0 2.9 MB
libllvm9-9.0.1 | h4a3c616_1 21.0 MB
openssl-1.1.1l | h7f8727e_0 2.5 MB
pycairo-1.19.1 | py38h708ec4a_0 73 KB
snappy-1.1.8 | he6710b0_0 40 KB
wrapt-1.12.1 | py38h7b6447c_1 50 KB
------------------------------------------------------------
Total: 27.1 MB
The following NEW packages will be INSTALLED:
_anaconda_depends pkgs/main/linux-64::_anaconda_depends-2020.07-py38_0
h5py pkgs/main/linux-64::h5py-2.10.0-py38h7918eee_0
libllvm9 pkgs/main/linux-64::libllvm9-9.0.1-h4a3c616_1
pycairo pkgs/main/linux-64::pycairo-1.19.1-py38h708ec4a_0
snappy pkgs/main/linux-64::snappy-1.1.8-he6710b0_0
wrapt pkgs/main/linux-64::wrapt-1.12.1-py38h7b6447c_1
The following packages will be UPDATED:
astroid 2.4.2-py38_0 --> 2.5-py38h06a4308_1
ca-certificates 2020.10.14-0 --> 2021.7.5-h06a4308_1
certifi pkgs/main/noarch::certifi-2020.6.20-p~ --> pkgs/main/linux-64::certifi-2021.5.30-py38h06a4308_0
conda 4.9.2-py38h06a4308_0 --> 4.10.3-py38h06a4308_0
openssl 1.1.1h-h7b6447c_0 --> 1.1.1l-h7f8727e_0
The following packages will be DOWNGRADED:
anaconda 2020.11-py38_0 --> custom-py38_1
Proceed ([y]/n)? y
Downloading and Extracting Packages
anaconda-custom | 35 KB | ##################################### | 100%
openssl-1.1.1l | 2.5 MB | ##################################### | 100%
wrapt-1.12.1 | 50 KB | ##################################### | 100%
certifi-2021.5.30 | 138 KB | ##################################### | 100%
pycairo-1.19.1 | 73 KB | ##################################### | 100%
ca-certificates-2021 | 113 KB | ##################################### | 100%
astroid-2.5 | 284 KB | ##################################### | 100%
_anaconda_depends-20 | 6 KB | ##################################### | 100%
snappy-1.1.8 | 40 KB | ##################################### | 100%
libllvm9-9.0.1 | 21.0 MB | ##################################### | 100%
conda-4.10.3 | 2.9 MB | ##################################### | 100%
Preparing transaction: done
Verifying transaction: done
Executing transaction: done
(base) caozilong@caozilong-Vostro-3268:~/mimal/manim$
验证用例:
python -m manim example_scenes.py SquareToCircle -pl
python -m manim example_scenes.py WarpSquare -pl
以一个例子说明3B1B的动画制作原理
from manimlib.imports import *
import os
import pyclbr
class Shapes(Scene):
#A few simple shapes
#Python 2.7 version runs in Python 3.7 without changes
def construct(self):
circle = Circle()
square = Square()
line=Line(np.array([3,0,0]),np.array([5,0,0]))
triangle=Polygon(np.array([0,0,0]),np.array([1,1,0]),np.array([1,-1,0]))
self.play(ShowCreation(circle))
self.play(FadeOut(circle))
self.play(GrowFromCenter(square))
self.play(Transform(square,triangle))
self.add(line)
class MoreShapes(Scene):
#A few more simple shapes
#2.7 version runs in 3.7 without any changes
#Note: I fixed my 'play command not found' issue by installing sox
def construct(self):
circle = Circle(color=PURPLE_A)
square = Square(fill_color=GOLD_B, fill_opacity=1, color=GOLD_A)
square.move_to(UP+LEFT)
circle.surround(square)
rectangle = Rectangle(height=2, width=3)
ellipse=Ellipse(width=3, height=1, color=RED)
ellipse.shift(2*DOWN+2*RIGHT)
pointer = CurvedArrow(2*RIGHT,5*RIGHT,color=MAROON_C)
arrow = Arrow(LEFT,UP)
arrow.next_to(circle,DOWN+LEFT)
rectangle.next_to(arrow,DOWN+LEFT)
ring=Annulus(inner_radius=.5, outer_radius=1, color=BLUE)
ring.next_to(ellipse, RIGHT)
self.add(pointer)
self.play(FadeIn(square))
self.play(Rotating(square),FadeIn(circle))
self.play(GrowArrow(arrow))
self.play(GrowFromCenter(rectangle), GrowFromCenter(ellipse), GrowFromCenter(ring))
class MovingShapes(Scene):
#Show the difference between .shift() and .move_to
def construct(self):
circle=Circle(color=TEAL_A)
circle.move_to(LEFT)
square=Circle()
square.move_to(LEFT+3*DOWN)
self.play(GrowFromCenter(circle), GrowFromCenter(square), rate=5)
self.play(ApplyMethod(circle.move_to,RIGHT), ApplyMethod(square.shift,RIGHT))
self.play(ApplyMethod(circle.move_to,RIGHT+UP), ApplyMethod(square.shift,RIGHT+UP))
self.play(ApplyMethod(circle.move_to,LEFT+UP), ApplyMethod(square.shift,LEFT+UP))
class AddingText(Scene):
#Adding text on the screen
def construct(self):
my_first_text=TextMobject("Writing with manim is fun")
second_line=TextMobject("and easy to do!")
second_line.next_to(my_first_text,DOWN)
third_line=TextMobject("for me and you!")
third_line.next_to(my_first_text,DOWN)
self.add(my_first_text, second_line)
self.wait(2)
self.play(Transform(second_line,third_line))
self.wait(2)
second_line.shift(3*DOWN)
self.play(ApplyMethod(my_first_text.shift,3*UP))
###Try uncommenting the following###
#self.play(ApplyMethod(second_line.move_to, LEFT_SIDE-2*LEFT))
#self.play(ApplyMethod(my_first_text.next_to,second_line))
class AddingMoreText(Scene):
#Playing around with text properties
def construct(self):
quote = TextMobject("Imagination is more important than knowledge")
quote.set_color(RED)
quote.to_edge(UP)
quote2 = TextMobject("A person who never made a mistake never tried anything new")
quote2.set_color(YELLOW)
author=TextMobject("-Albert Einstein")
author.scale(0.75)
author.next_to(quote.get_corner(DOWN+RIGHT),DOWN)
self.add(quote)
self.add(author)
self.wait(2)
self.play(Transform(quote,quote2),ApplyMethod(author.move_to,quote2.get_corner(DOWN+RIGHT)+DOWN+2*LEFT))
self.play(ApplyMethod(author.scale,1.5))
author.match_color(quote2)
self.play(FadeOut(quote))
class RotateAndHighlight(Scene):
#Rotation of text and highlighting with surrounding geometries
def construct(self):
square=Square(side_length=5,fill_color=YELLOW, fill_opacity=1)
label=TextMobject("Text at an angle")
label.bg=BackgroundRectangle(label,fill_opacity=1)
label_group=VGroup(label.bg,label) #Order matters
label_group.rotate(TAU/8)
label2=TextMobject("Boxed text",color=BLACK)
label2.bg=SurroundingRectangle(label2,color=BLUE,fill_color=RED, fill_opacity=.5)
label2_group=VGroup(label2,label2.bg)
label2_group.next_to(label_group,DOWN)
label3=TextMobject("Rainbow")
label3.scale(2)
label3.set_color_by_gradient(RED, ORANGE, YELLOW, GREEN, BLUE, PURPLE)
label3.to_edge(DOWN)
self.add(square)
self.play(FadeIn(label_group))
self.play(FadeIn(label2_group))
self.play(FadeIn(label3))
class BasicEquations(Scene):
#A short script showing how to use Latex commands
def construct(self):
eq1=TextMobject("$\\vec{X}_0 \\cdot \\vec{Y}_1 = 3$")
eq1.shift(2*UP)
eq2=TexMobject(r"\vec{F}_{net} = \sum_i \vec{F}_i")
eq2.shift(2*DOWN)
self.play(Write(eq1))
self.play(Write(eq2))
class ColoringEquations(Scene):
#Grouping and coloring parts of equations
def construct(self):
line1=TexMobject(r"\text{The vector } \vec{F}_{net} \text{ is the net }",r"\text{force }",r"\text{on object of mass }")
line1.set_color_by_tex("force", BLUE)
line2=TexMobject("m", "\\text{ and acceleration }", "\\vec{a}", ". ")
line2.set_color_by_tex_to_color_map({
"m": YELLOW,
"{a}": RED
})
sentence=VGroup(line1,line2)
sentence.arrange_submobjects(DOWN, buff=MED_LARGE_BUFF)
self.play(Write(sentence))
class UsingBraces(Scene):
#Using braces to group text together
def construct(self):
eq1A = TextMobject("4x + 3y")
eq1B = TextMobject("=")
eq1C = TextMobject("0")
eq2A = TextMobject("5x -2y")
eq2B = TextMobject("=")
eq2C = TextMobject("3")
eq1B.next_to(eq1A,RIGHT)
eq1C.next_to(eq1B,RIGHT)
eq2A.shift(DOWN)
eq2B.shift(DOWN)
eq2C.shift(DOWN)
eq2A.align_to(eq1A,LEFT)
eq2B.align_to(eq1B,LEFT)
eq2C.align_to(eq1C,LEFT)
eq_group=VGroup(eq1A,eq2A)
braces=Brace(eq_group,LEFT)
eq_text = braces.get_text("A pair of equations")
self.add(eq1A, eq1B, eq1C)
self.add(eq2A, eq2B, eq2C)
self.play(GrowFromCenter(braces),Write(eq_text))
class UsingBracesConcise(Scene):
#A more concise block of code with all columns aligned
def construct(self):
eq1_text=["4","x","+","3","y","=","0"]
eq2_text=["5","x","-","2","y","=","3"]
eq1_mob=TexMobject(*eq1_text)
eq2_mob=TexMobject(*eq2_text)
eq1_mob.set_color_by_tex_to_color_map({
"x":RED_B,
"y":GREEN_C
})
eq2_mob.set_color_by_tex_to_color_map({
"x":RED_B,
"y":GREEN_C
})
for i,item in enumerate(eq2_mob):
item.align_to(eq1_mob[i],LEFT)
eq1=VGroup(*eq1_mob)
eq2=VGroup(*eq2_mob)
eq2.shift(DOWN)
eq_group=VGroup(eq1,eq2)
braces=Brace(eq_group,LEFT)
eq_text = braces.get_text("A pair of equations")
self.play(Write(eq1),Write(eq2))
self.play(GrowFromCenter(braces),Write(eq_text))
class PlotFunctions(GraphScene):
CONFIG = {
"x_min" : -10,
"x_max" : 10.3,
"y_min" : -1.5,
"y_max" : 1.5,
"graph_origin" : ORIGIN ,
"function_color" : RED ,
"axes_color" : GREEN,
"x_labeled_nums" :range(-10,12,2),
}
def construct(self):
self.setup_axes(animate=True)
func_graph=self.get_graph(self.func_to_graph,self.function_color)
func_graph2=self.get_graph(self.func_to_graph2)
vert_line = self.get_vertical_line_to_graph(TAU,func_graph,color=YELLOW)
graph_lab = self.get_graph_label(func_graph, label = "\\cos(x)")
graph_lab2=self.get_graph_label(func_graph2,label = "\\sin(x)", x_val=-10, direction=UP/2)
two_pi = TexMobject("x = 2 \\pi")
label_coord = self.input_to_graph_point(TAU,func_graph)
two_pi.next_to(label_coord,RIGHT+UP)
self.play(ShowCreation(func_graph),ShowCreation(func_graph2))
self.play(ShowCreation(vert_line), ShowCreation(graph_lab), ShowCreation(graph_lab2),ShowCreation(two_pi))
def func_to_graph(self,x):
return np.cos(x)
def func_to_graph2(self,x):
return np.sin(x)
class ExampleApproximation(GraphScene):
CONFIG = {
"function" : lambda x : np.cos(x),
"function_color" : BLUE,
"taylor" : [lambda x: 1, lambda x: 1-x**2/2, lambda x: 1-x**2/math.factorial(2)+x**4/math.factorial(4), lambda x: 1-x**2/2+x**4/math.factorial(4)-x**6/math.factorial(6),
lambda x: 1-x**2/math.factorial(2)+x**4/math.factorial(4)-x**6/math.factorial(6)+x**8/math.factorial(8), lambda x: 1-x**2/math.factorial(2)+x**4/math.factorial(4)-x**6/math.factorial(6)+x**8/math.factorial(8) - x**10/math.factorial(10)],
"center_point" : 0,
"approximation_color" : GREEN,
"x_min" : -10,
"x_max" : 10,
"y_min" : -1,
"y_max" : 1,
"graph_origin" : ORIGIN ,
"x_labeled_nums" :range(-10,12,2),
}
def construct(self):
self.setup_axes(animate=True)
func_graph = self.get_graph(
self.function,
self.function_color,
)
approx_graphs = [
self.get_graph(
f,
self.approximation_color
)
for f in self.taylor
]
term_num = [
TexMobject("n = " + str(n),aligned_edge=TOP)
for n in range(0,8)]
#[t.to_edge(BOTTOM,buff=SMALL_BUFF) for t in term_num]
#term = TexMobject("")
#term.to_edge(BOTTOM,buff=SMALL_BUFF)
term = VectorizedPoint(3*DOWN)
approx_graph = VectorizedPoint(
self.input_to_graph_point(self.center_point, func_graph)
)
self.play(
ShowCreation(func_graph),
)
for n,graph in enumerate(approx_graphs):
self.play(
Transform(approx_graph, graph, run_time = 2),
Transform(term,term_num[n])
)
self.wait()
class DrawAnAxis(Scene):
CONFIG = { "plane_kwargs" : {
"x_line_frequency" : 2,
"y_line_frequency" :2
}
}
def construct(self):
my_plane = NumberPlane(**self.plane_kwargs)
my_plane.add(my_plane.get_axis_labels())
self.add(my_plane)
#self.wait()
class SimpleField(Scene):
CONFIG = {
"plane_kwargs" : {
"color" : RED
},
}
def construct(self):
plane = NumberPlane(**self.plane_kwargs) #Create axes and grid
plane.add(plane.get_axis_labels()) #add x and y label
self.add(plane) #Place grid on screen
points = [x*RIGHT+y*UP
for x in np.arange(-5,5,1)
for y in np.arange(-5,5,1)
] #List of vectors pointing to each grid point
vec_field = [] #Empty list to use in for loop
for point in points:
field = 0.5*RIGHT + 0.5*UP #Constant field up and to right
result = Vector(field).shift(point) #Create vector and shift it to grid point
vec_field.append(result) #Append to list
draw_field = VGroup(*vec_field) #Pass list of vectors to create a VGroup
self.play(ShowCreation(draw_field)) #Draw VGroup on screen
class FieldWithAxes(Scene):
CONFIG = {
"plane_kwargs" : {
"color" : RED_B
},
"point_charge_loc" : 0.5*RIGHT-1.5*UP,
}
def construct(self):
plane = NumberPlane(**self.plane_kwargs)
#plane.main_lines.fade(.9) #doesn't work in most recent commit
plane.add(plane.get_axis_labels())
self.add(plane)
field = VGroup(*[self.calc_field(x*RIGHT+y*UP)
for x in np.arange(-9,9,1)
for y in np.arange(-5,5,1)
])
self.play(ShowCreation(field))
def calc_field(self,point):
#This calculates the field at a single point.
x,y = point[:2]
Rx,Ry = self.point_charge_loc[:2]
r = math.sqrt((x-Rx)**2 + (y-Ry)**2)
efield = (point - self.point_charge_loc)/r**3
#efield = np.array((-y,x,0))/math.sqrt(x**2+y**2) #Try one of these two fields
#efield = np.array(( -2*(y%2)+1 , -2*(x%2)+1 , 0 ))/3 #Try one of these two fields
return Vector(efield).shift(point)
class ExampleThreeD(ThreeDScene):
CONFIG = {
"plane_kwargs" : {
"color" : RED_B
},
"point_charge_loc" : 0.5*RIGHT-1.5*UP,
}
def construct(self):
plane = NumberPlane(**self.plane_kwargs)
#plane.main_lines.fade(.9) #Doesn't work in most recent commit
plane.add(plane.get_axis_labels())
self.add(plane)
field2D = VGroup(*[self.calc_field2D(x*RIGHT+y*UP)
for x in np.arange(-9,9,1)
for y in np.arange(-5,5,1)
])
self.set_camera_orientation(phi=PI/3,gamma=PI/5)
self.play(ShowCreation(field2D))
self.wait()
#self.move_camera(gamma=0,run_time=1) #Doesn't work in most recent commit
#self.move_camera(phi=3/4*PI, theta=-PI/2) #Doesn't work in most recent commit
self.begin_ambient_camera_rotation(rate=0.1)
self.wait(6)
def calc_field2D(self,point):
x,y = point[:2]
Rx,Ry = self.point_charge_loc[:2]
r = math.sqrt((x-Rx)**2 + (y-Ry)**2)
efield = (point - self.point_charge_loc)/r**3
return Vector(efield).shift(point)
class EFieldInThreeD(ThreeDScene):
CONFIG = {
"plane_kwargs" : {
"color" : RED_B
},
"point_charge_loc" : 0.5*RIGHT-1.5*UP,
}
def construct(self):
plane = NumberPlane(**self.plane_kwargs)
#plane.main_lines.fade(.9) #Doesn't work in most recent commit
plane.add(plane.get_axis_labels())
self.add(plane)
field2D = VGroup(*[self.calc_field2D(x*RIGHT+y*UP)
for x in np.arange(-9,9,1)
for y in np.arange(-5,5,1)
])
field3D = VGroup(*[self.calc_field3D(x*RIGHT+y*UP+z*OUT)
for x in np.arange(-9,9,1)
for y in np.arange(-5,5,1)
for z in np.arange(-5,5,1)])
self.play(ShowCreation(field3D))
self.wait()
#self.move_camera(0.8*np.pi/2, -0.45*np.pi) #Doesn't work in most recent commit
self.begin_ambient_camera_rotation()
self.wait(6)
def calc_field2D(self,point):
x,y = point[:2]
Rx,Ry = self.point_charge_loc[:2]
r = math.sqrt((x-Rx)**2 + (y-Ry)**2)
efield = (point - self.point_charge_loc)/r**3
return Vector(efield).shift(point)
def calc_field3D(self,point):
x,y,z = point
Rx,Ry,Rz = self.point_charge_loc
r = math.sqrt((x-Rx)**2 + (y-Ry)**2+(z-Rz)**2)
efield = (point - self.point_charge_loc)/r**3
#efield = np.array((-y,x,z))/math.sqrt(x**2+y**2+z**2)
return Vector(efield).shift(point)
class MovingCharges(Scene):
CONFIG = {
"plane_kwargs" : {
"color" : RED_B
},
"point_charge_loc" : 0.5*RIGHT-1.5*UP,
}
def construct(self):
plane = NumberPlane(**self.plane_kwargs)
#plane.main_lines.fade(.9) #Doesn't work in most recent commit
plane.add(plane.get_axis_labels())
self.add(plane)
field = VGroup(*[self.calc_field(x*RIGHT+y*UP)
for x in np.arange(-9,9,1)
for y in np.arange(-5,5,1)
])
self.field=field
source_charge = self.Positron().move_to(self.point_charge_loc)
self.play(FadeIn(source_charge))
self.play(ShowCreation(field))
self.moving_charge()
def calc_field(self,point):
x,y = point[:2]
Rx,Ry = self.point_charge_loc[:2]
r = math.sqrt((x-Rx)**2 + (y-Ry)**2)
efield = (point - self.point_charge_loc)/r**3
return Vector(efield).shift(point)
def moving_charge(self):
numb_charges=4
possible_points = [v.get_start() for v in self.field]
points = random.sample(possible_points, numb_charges)
particles = VGroup(*[
self.Positron().move_to(point)
for point in points
])
for particle in particles:
particle.velocity = np.array((0,0,0))
self.play(FadeIn(particles))
self.moving_particles = particles
self.add_foreground_mobjects(self.moving_particles )
self.always_continually_update = True
self.wait(10)
def field_at_point(self,point):
x,y = point[:2]
Rx,Ry = self.point_charge_loc[:2]
r = math.sqrt((x-Rx)**2 + (y-Ry)**2)
efield = (point - self.point_charge_loc)/r**3
return efield
def continual_update(self, *args, **kwargs):
if hasattr(self, "moving_particles"):
dt = self.frame_duration
for p in self.moving_particles:
accel = self.field_at_point(p.get_center())
p.velocity = p.velocity + accel*dt
p.shift(p.velocity*dt)
class Positron(Circle):
CONFIG = {
"radius" : 0.2,
"stroke_width" : 3,
"color" : RED,
"fill_color" : RED,
"fill_opacity" : 0.5,
}
def __init__(self, **kwargs):
Circle.__init__(self, **kwargs)
plus = TexMobject("+")
plus.scale(0.7)
plus.move_to(self)
self.add(plus)
class FieldOfMovingCharge(Scene):
CONFIG = {
"plane_kwargs" : {
"color" : RED_B
},
"point_charge_start_loc" : 5.5*LEFT-1.5*UP,
}
def construct(self):
plane = NumberPlane(**self.plane_kwargs)
#plane.main_lines.fade(.9) #Doesn't work in most recent commit
plane.add(plane.get_axis_labels())
self.add(plane)
field = VGroup(*[self.create_vect_field(self.point_charge_start_loc,x*RIGHT+y*UP)
for x in np.arange(-9,9,1)
for y in np.arange(-5,5,1)
])
self.field=field
self.source_charge = self.Positron().move_to(self.point_charge_start_loc)
self.source_charge.velocity = np.array((1,0,0))
self.play(FadeIn(self.source_charge))
self.play(ShowCreation(field))
self.moving_charge()
def create_vect_field(self,source_charge,observation_point):
return Vector(self.calc_field(source_charge,observation_point)).shift(observation_point)
def calc_field(self,source_point,observation_point):
x,y,z = observation_point
Rx,Ry,Rz = source_point
r = math.sqrt((x-Rx)**2 + (y-Ry)**2 + (z-Rz)**2)
if r<0.0000001: #Prevent divide by zero
efield = np.array((0,0,0))
else:
efield = (observation_point - source_point)/r**3
return efield
def moving_charge(self):
numb_charges=3
possible_points = [v.get_start() for v in self.field]
points = random.sample(possible_points, numb_charges)
particles = VGroup(self.source_charge, *[
self.Positron().move_to(point)
for point in points
])
for particle in particles[1:]:
particle.velocity = np.array((0,0,0))
self.play(FadeIn(particles[1:]))
self.moving_particles = particles
self.add_foreground_mobjects(self.moving_particles )
self.always_continually_update = True
self.wait(10)
def continual_update(self, *args, **kwargs):
Scene.continual_update(self, *args, **kwargs)
if hasattr(self, "moving_particles"):
dt = self.frame_duration
for v in self.field:
field_vect=np.zeros(3)
for p in self.moving_particles:
field_vect = field_vect + self.calc_field(p.get_center(), v.get_start())
v.put_start_and_end_on(v.get_start(), field_vect+v.get_start())
for p in self.moving_particles:
accel = np.zeros(3)
p.velocity = p.velocity + accel*dt
p.shift(p.velocity*dt)
class Positron(Circle):
CONFIG = {
"radius" : 0.2,
"stroke_width" : 3,
"color" : RED,
"fill_color" : RED,
"fill_opacity" : 0.5,
}
def __init__(self, **kwargs):
Circle.__init__(self, **kwargs)
plus = TexMobject("+")
plus.scale(0.7)
plus.move_to(self)
self.add(plus)
HEAD_INDEX = 0
BODY_INDEX = 1
ARMS_INDEX = 2
LEGS_INDEX = 3
class StickMan(SVGMobject):
CONFIG = {
"color" : BLUE_E,
"file_name_prefix": "stick_man",
"stroke_width" : 2,
"stroke_color" : WHITE,
"fill_opacity" : 1.0,
"height" : 3,
}
def __init__(self, mode = "plain", **kwargs):
digest_config(self, kwargs)
self.mode = mode
self.parts_named = False
try:
svg_file = os.path.join(
SVG_IMAGE_DIR,
"%s_%s.svg" % (self.file_name_prefix, mode)
)
SVGMobject.__init__(self, file_name=svg_file, **kwargs)
except:
warnings.warn("No %s design with mode %s" %
(self.file_name_prefix, mode))
svg_file = os.path.join(
SVG_IMAGE_DIR,
"stick_man_plain.svg",
)
SVGMobject.__init__(self, mode="plain", file_name=svg_file, **kwargs)
def name_parts(self):
self.head = self.submobjects[HEAD_INDEX]
self.body = self.submobjects[BODY_INDEX]
self.arms = self.submobjects[ARMS_INDEX]
self.legs = self.submobjects[LEGS_INDEX]
self.parts_named = True
def init_colors(self):
SVGMobject.init_colors(self)
if not self.parts_named:
self.name_parts()
self.head.set_fill(self.color, opacity = 1)
self.body.set_fill(RED, opacity = 1)
self.arms.set_fill(YELLOW, opacity = 1)
self.legs.set_fill(BLUE, opacity = 1)
return self
class Waving(Scene):
def construct(self):
start_man = StickMan()
plain_man = StickMan()
waving_man = StickMan("wave")
self.add(start_man)
self.wait()
self.play(Transform(start_man,waving_man))
self.play(Transform(start_man,plain_man))
self.wait()
class CirclesAndSquares(SVGMobject):
CONFIG = {
"color" : BLUE_E,
"file_name_prefix": "circles_and_squares",
"stroke_width" : 2,
"stroke_color" : WHITE,
"fill_opacity" : 1.0,
"height" : 3,
"start_corner" : None,
"circle_index" : 0,
"line1_index" :1,
"line2_index" : 2,
"square1_index" : 3,
"square2_index" : 4,
}
def __init__(self, mode = "plain", **kwargs):
digest_config(self, kwargs)
self.mode = mode
self.parts_named = False
try:
svg_file = os.path.join(
SVG_IMAGE_DIR,
"%s_%s.svg" % (self.file_name_prefix, mode)
)
SVGMobject.__init__(self, file_name=svg_file, **kwargs)
except:
warnings.warn("No %s design with mode %s" %
(self.file_name_prefix, mode))
svg_file = os.path.join(
SVG_IMAGE_DIR,
"circles_and_squares_plain.svg",
)
SVGMobject.__init__(self, mode="plain", file_name=svg_file, **kwargs)
def name_parts(self):
self.circle = self.submobjects[self.circle_index]
self.line1 = self.submobjects[self.line1_index]
self.line2 = self.submobjects[self.line2_index]
self.square1 = self.submobjects[self.square1_index]
self.square2 = self.submobjects[self.square2_index]
self.parts_named = True
def init_colors(self):
SVGMobject.init_colors(self)
self.name_parts()
self.circle.set_fill(RED, opacity = 1)
self.line1.set_fill(self.color, opacity = 0)
self.line2.set_fill(self.color, opacity = 0)
self.square1.set_fill(GREEN, opacity = 1)
self.square2.set_fill(BLUE, opacity = 1)
return self
class SVGCircleAndSquare(Scene):
def construct(self):
thingy = CirclesAndSquares()
self.add(thingy)
self.wait()
if __name__ == "__main__":
# Call this file at command line to make sure all scenes work with version of manim
# type "python manim_tutorial_P37.py" at command line to run all scenes in this file
#Must have "import os" and "import pyclbr" at start of file to use this
###Using Python class browser to determine which classes are defined in this file
module_name = 'manim_tutorial_P37' #Name of current file
module_info = pyclbr.readmodule(module_name)
for item in module_info.values():
if item.module==module_name:
print(item.name)
os.system("python -m manim manim_tutorial_P37.py %s -l" % item.name) #Does not play files
执行测试
python -m manim manim_tutorial_P37.py MoreShapes -pl效果:
还有其他一些例子,比如:
支持字体:
此时的环境不支持字体显示,执行带有字体处理的用例会失败,所以接下来需要支持字体处理
安装字体文件:
- physics.sty:https://mirrors.ctan.org/macros/latex/contrib/physics/physics.sty
- dsfont.sty:
将这两个文件下载到:
/usr/share/texlive/texmf-dist/tex/latex/physics/physics.sty
和
/usr/share/texlive/texmf-dist/tex/latex/dsfont/
目录
最后执行sudo mktexlsr,如下图所示:

OK,现在可以支持字体显示了,我们重新运行用例:
python -m manim manim_tutorial_P37.py PlotFunctions -pl
manim_tutorial_P37.py中有21个用例,安装字体后都可以运行






高端一些的例子:
git clone https://github.com/3b1b/manim.git
pip install -e .

验证命令:
manimgl example_scenes.py OpeningManimExample
或者
manim-render example_scenes.py OpeningManimExample
效果:
总结:
3B1B 动画的制作思路是:根据自己想在场景中展现的内容和效果编写一系列的类,然后通过命令行对每个类进行实例化,前面输入的测试命令其实就包含了类的实例化过程,而每个类被实例化后都将得到一个动画片段,通过视频制作软件将各个片段衔接起来并配音,就能得到大家喜闻乐见的 3B1B 教学动画了。