python opencv高斯滤波_Python+OpenCV图像处理(七)—— 滤波与模糊操作
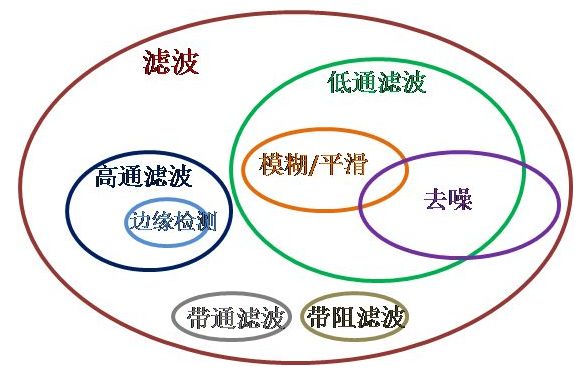
过滤是信号和图像处理中基本的任务。其目的是根据应用环境的不同,选择性的提取图像中某些认为是重要的信息。过滤可以移除图像中的噪音、提取感兴趣的可视特征、允许图像重采样等等。频域分析将图像分成从低频到高频的不同部分。低频对应图像强度变化小的区域,而高频是图像强度变化非常大的区域。在频率分析领域的框架中,滤波器是一个用来增强图像中某个波段或频率并阻塞(或降低)其他频率波段的操作。低通滤波器是消除图像中高频部分,但保留低频部分。高通滤波器消除低频部分。参考博客:https://blog.csdn.net/sunny2038/article/details/9155893
个人认为模糊操作就是过滤掉图像中的一些特殊噪音。
一、均值模糊、中值模糊、用户自定义模糊
代码如下:
#均值模糊、中值模糊、自定义模糊 模糊是卷积的一种表象
importcv2 as cvimportnumpy as npdef blur_demo(image): #均值模糊 去随机噪声有很好的去燥效果
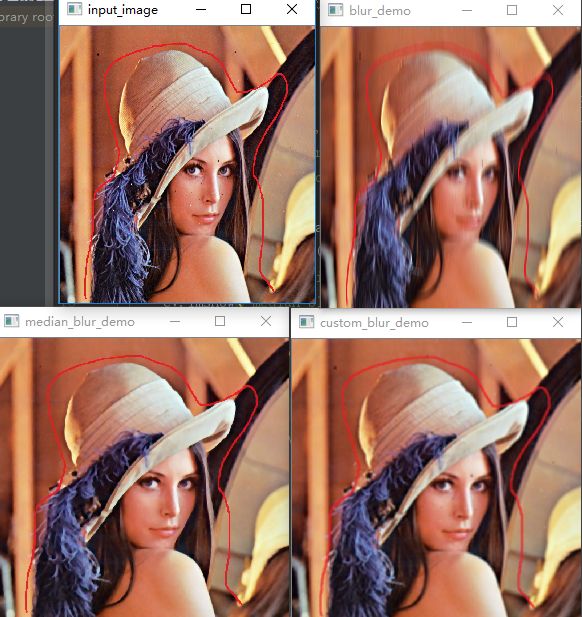
dst = cv.blur(image, (1, 15)) #(1, 15)是垂直方向模糊,(15, 1)还水平方向模糊
cv.namedWindow('blur_demo', cv.WINDOW_NORMAL)
cv.imshow("blur_demo", dst)def median_blur_demo(image): #中值模糊 对椒盐噪声有很好的去燥效果
dst = cv.medianBlur(image, 5)
cv.namedWindow('median_blur_demo', cv.WINDOW_NORMAL)
cv.imshow("median_blur_demo", dst)def custom_blur_demo(image): #用户自定义模糊
kernel = np.ones([5, 5], np.float32)/25 #除以25是防止数值溢出dst= cv.filter2D(image, -1, kernel)
cv.namedWindow('custom_blur_demo', cv.WINDOW_NORMAL)
cv.imshow("custom_blur_demo", dst)
src= cv.imread('E:\imageload\lenanoise.jpg')
cv.namedWindow('input_image', cv.WINDOW_NORMAL)
cv.imshow('input_image', src)
blur_demo(src)
median_blur_demo(src)
custom_blur_demo(src)
cv.waitKey(0)
cv.destroyAllWindows()
运行结果:
注意:
1.均值滤波是典型的线性滤波算法,它是指在图像上对目标像素给一个模板,该模板包括了其周围的临近像素(以目标像素为中心的周围8个像素,构成一个滤波模板,即去掉目标像素本身),再用模板中的全体像素的平均值来代替原来像素值。
低通滤波(均值模糊)函数原型:blur(src, ksize[, dst[, anchor[, borderType]]]) -> dst
src参数表示待处理的输入图像。
ksize参数表示模糊内核大小。比如(1,15)表示生成的模糊内核是一个1*15的矩阵。
dst参数表示输出与src相同大小和类型的图像。
anchor参数、borderType参数可忽略
中值滤波(中值模糊)函数原型:medianBlur(src, ksize[, dst]) -> dst
src参数表示待处理的输入图像。
ksize参数表示滤波窗口尺寸,必须是奇数并且大于1。比如这里是5,中值滤波器就会使用5×5的范围来计算,即对像素的中心值及其5×5邻域组成了一个数值集,对其进行处理计算,当前像素被其中值替换掉。
dst参数表示输出与src相同大小和类型的图像。
3.用户自定义模糊
所用函数:filter2D()
函数原型: filter2D(src, ddepth, kernel[, dst[, anchor[, delta[, borderType]]]]) -> dst
src参数表示待处理的输入图像。
ddepth参数表示目标图像深度,输入值为-1时,目标图像和原图像深度保持一致
kernel: 卷积核(或者是相关核),一个单通道浮点型矩阵。修改kernel矩阵即可实现不同的模糊
二、高斯模糊
代码如下:
#高斯模糊 轮廓还在,保留图像的主要特征 高斯模糊比均值模糊去噪效果好
importcv2 as cvimportnumpy as npdefclamp(pv):if pv > 255:return 255
if pv <0:return0else:returnpvdef gaussian_noise(image): #加高斯噪声
h, w, c =image.shapefor row inrange(h):for col inrange(w):
s= np.random.normal(0, 20, 3)
b= image[row, col, 0] #blue
g = image[row, col, 1] #green
r = image[row, col, 2] #red
image[row, col, 0] = clamp(b +s[0])
image[row, col,1] = clamp(g + s[1])
image[row, col,2] = clamp(r + s[2])
cv.namedWindow("noise image", cv.WINDOW_NORMAL)
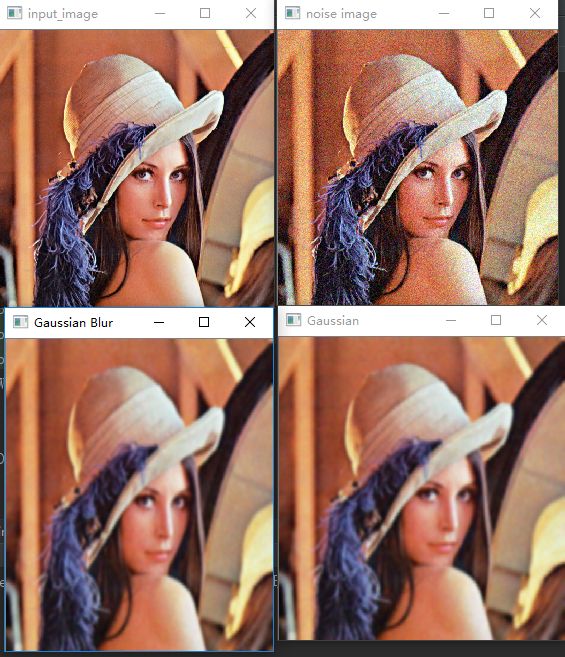
cv.imshow("noise image", image)
dst= cv.GaussianBlur(image, (15, 15), 0) #高斯模糊
cv.namedWindow("Gaussian", cv.WINDOW_NORMAL)
cv.imshow("Gaussian", dst)
src= cv.imread('E:\imageload\lena.jpg')
cv.namedWindow("input_image", cv.WINDOW_NORMAL)
cv.imshow('input_image', src)
gaussian_noise(src)
dst= cv.GaussianBlur(src, (15,15), 0) #高斯模糊
cv.namedWindow("Gaussian Blur", cv.WINDOW_NORMAL)
cv.imshow("Gaussian Blur", dst)
cv.waitKey(0)
cv.destroyAllWindows()
运行结果:
注意:
1.高斯模糊实质上就是一种均值模糊,只是高斯模糊是按照加权平均的,距离越近的点权重越大,距离越远的点权重越小。通俗的讲,高斯滤波就是对整幅图像进行加权平均的过程,每一个像素点的值,都由其本身和邻域内的其他像素值经过加权平均后得到。
2.高斯分布的一维和二维原理如下:
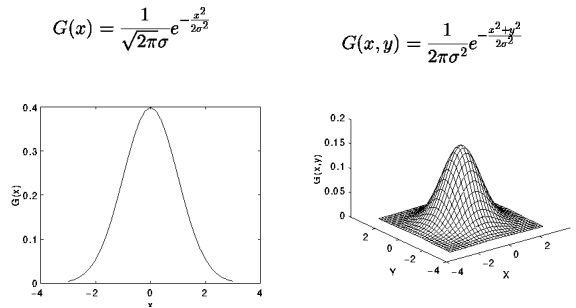
补:高斯分布的标准差σ。标准差代表着数据的离散程度,如果σ较小,那么生成的模板的中心系数较大,而周围的系数较小,这样对图像的平滑效果就不是很明显;反之,σ较大,则生成的模板的各个系数相差就不是很大,比较类似均值模板,对图像的平滑效果比较明显。
3.高斯模糊GaussianBlur函数原型:GaussianBlur(src, ksize, sigmaX[, dst[, sigmaY[, borderType]]]) -> dst
src参数表示待处理的输入图像。
ksize参数表示高斯滤波器模板大小。 ksize.width和ksize.height可以不同,但它们都必须是正数和奇数。或者,它们可以是零,即(0, 0),然后从σ计算出来。
sigmaX参数表示 X方向上的高斯内核标准差。
sigmaY参数表示 Y方向上的高斯内核标准差。 如果sigmaY为零,则设置为等于sigmaX,如果两个sigma均为零,则分别从ksize.width和ksize.height计算得到。
补:若ksize不为(0, 0),则按照ksize计算,后面的sigmaX没有意义。若ksize为(0, 0),则根据后面的sigmaX计算ksize
4.numpy包里的random模块用于生成随机数,random模块里的normal函数表示的是生成高斯随机数。
normal函数默认原型:normal(loc=0.0, scale=1.0, size=None)。
loc参数表示高斯分布的中心点。
scale参数表示高斯分布的标准差σ。
size参数表示产生随机数的个数。size取值可以为(m,n,k),表示绘制m*n*k个样本。
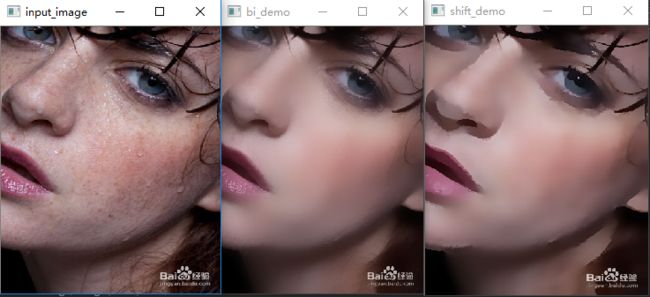
三、边缘保留滤波EPF
进行边缘保留滤波通常用到两个方法:高斯双边滤波和均值迁移滤波。
代码如下:
#边缘保留滤波(EPF) 高斯双边、均值迁移
importcv2 as cvimportnumpy as npdef bi_demo(image): #双边滤波
dst = cv.bilateralFilter(image, 0, 100, 15)
cv.namedWindow("bi_demo", cv.WINDOW_NORMAL)
cv.imshow("bi_demo", dst)def shift_demo(image): #均值迁移
dst = cv.pyrMeanShiftFiltering(image, 10, 50)
cv.namedWindow("shift_demo", cv.WINDOW_NORMAL)
cv.imshow("shift_demo", dst)
src= cv.imread('E:/imageload/example.png')
cv.namedWindow('input_image', cv.WINDOW_NORMAL)
cv.imshow('input_image', src)
bi_demo(src)
shift_demo(src)
cv.waitKey(0)
cv.destroyAllWindows()
运行结果:
注意:
1.双边滤波(Bilateral filter)是一种非线性的滤波方法,是结合图像的空间邻近度和像素值相似度的一种折中处理,同时考虑空域信息和灰度相似性,达到保边去噪的目的。双边滤波器顾名思义比高斯滤波多了一个高斯方差sigma-d,它是基于空间分布的高斯滤波函数,所以在边缘附近,离的较远的像素不会太多影响到边缘上的像素值,这样就保证了边缘附近像素值的保存。但是由于保存了过多的高频信息,对于彩色图像里的高频噪声,双边滤波器不能够干净的滤掉,只能够对于低频信息进行较好的滤波
2.双边滤波函数原型:bilateralFilter(src, d, sigmaColor, sigmaSpace[, dst[, borderType]]) -> dst
src参数表示待处理的输入图像。
d参数表示在过滤期间使用的每个像素邻域的直径。如果输入d非0,则sigmaSpace由d计算得出,如果sigmaColor没输入,则sigmaColor由sigmaSpace计算得出。
sigmaColor参数表示色彩空间的标准方差,一般尽可能大。较大的参数值意味着像素邻域内较远的颜色会混合在一起,从而产生更大面积的半相等颜色。
sigmaSpace参数表示坐标空间的标准方差(像素单位),一般尽可能小。参数值越大意味着只要它们的颜色足够接近,越远的像素都会相互影响。当d > 0时,它指定邻域大小而不考虑sigmaSpace。 否则,d与sigmaSpace成正比。
双边滤波原理:
3.均值漂移pyrMeanShiftFiltering函数原型:pyrMeanShiftFiltering(src, sp, sr[, dst[, maxLevel[, termcrit]]]) -> dst
src参数表示输入图像,8位,三通道图像。
sp参数表示漂移物理空间半径大小。
sr参数表示漂移色彩空间半径大小。
dst参数表示和源图象相同大小、相同格式的输出图象。
maxLevel参数表示金字塔的最大层数。
termcrit参数表示漂移迭代终止条件。
均值漂移原理: