STM32 超声波模块测距(*)
摘自:STM32 超声波模块测距
作者:追兮兮
发布时间: 2021-02-26 19:56:27
网址:https://blog.csdn.net/weixin_44234294/article/details/114147929
目录
-
- HC-SR04模块
- HC-SR04超声波测距模块工作原理
- HC-SR04超声波模块的时序触发图
- 思路步骤
- 代码
- 实验结果
- 总结
HC-SR04模块

HC-SR04超声波测距模块工作原理
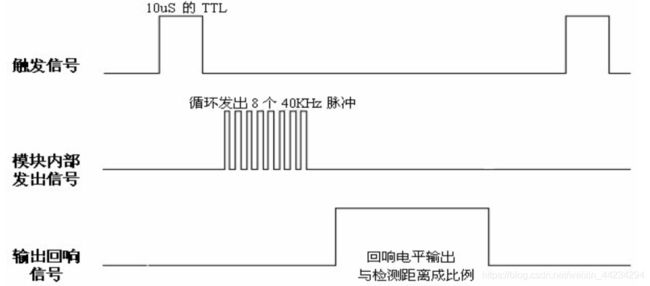
(1)采用IO口TRIG触发测距,给至少10us的高电平信号;
(2)模块自动发送8个40khz的方波,自动检测是否有信号返回;
(3)有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S))/2;
(4)本模块使用方法简单,一个控制口发一个10US以上的高电平,就可以在接收口等待高电平输出。一有输出就可以开定时器计时,当此口变为低电平时就可以读定时器的值,此时就为此次测距的时间,方可算出距离。如此不断的周期测,即可以达到你移动测量的值;
HC-SR04超声波模块的时序触发图
思路步骤
操作思路:
初始化时将trig和echo端口都置低,首先向给trig 发送至少10 us的高电平脉冲(模块自动向外发送8个40K的方波),然后等待,捕捉 echo 端输出上升沿,捕捉到上升沿的同时,打开定时器开始计时,再次等待捕捉echo的下降沿,当捕捉到下降沿,读出计时器的时间,这就是超声波在空气中运行的时间,按照 测试距离=(高电平时间*声速(340M/S))/2 就可以算出超声波到障碍物的距离。
编程步骤
1.配置好相应GPIO,Trig和Echo引脚
2.配置定时器,开启中断,并记录中断产生次数
3.给模块TRIG端口发送大于10us的高电平信号,发出回响信号时,Echo端呈现高电平,此时打开定时器计时;当收到回响信号时,Echo端呈现低电平,此时关闭定时器。
4.获取Echo高电平时间,利用相关公式计算出距离 dis = (高电平时间*声速(340M/S))/2(取平均值获取更精准数据)
代码
ultrasonsic.c
#include "ultrasonsic.h"
#include "delay.h"
u8 msHcCount = 0;//ms计数
static void NVIC_Config()
{
NVIC_InitTypeDef NVIC_InitStruct;
//设置中断组为2
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
//设置中断来源
NVIC_InitStruct.NVIC_IRQChannel = BASIC_TIM_IRQ;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
//设置主优先级
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1;
//设置次优先级
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1;
//初始化
NVIC_Init(&NVIC_InitStruct);
}
void Hcsr04Init()
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; //生成用于定时器设置的结构体
GPIO_InitTypeDef GPIO_InitStructure;
/*开启GPIOB时钟*/
RCC_APB2PeriphClockCmd(RCC_GPIOx,ENABLE);
//IO初始化
GPIO_InitStructure.GPIO_Pin =GPIOB_ULTR_Tx_PIN; //发送电平引脚TX
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//设置推挽输出
GPIO_Init(GPIOB_ULTR_PORT, &GPIO_InitStructure);
GPIO_ResetBits(GPIOB_ULTR_PORT,GPIOB_ULTR_Tx_PIN);//一开始低电平
GPIO_InitStructure.GPIO_Pin = GPIOB_ULTR_Rx_PIN; //返回电平引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOB_ULTR_PORT, &GPIO_InitStructure);
GPIO_ResetBits(GPIOB_ULTR_PORT,GPIOB_ULTR_Rx_PIN); //默认低电平
//定时器初始化 使用基本定时器TIM2
RCC_APB1PeriphClockCmd(BASIC_TIM_CLK, ENABLE); //使能对应RCC时钟
//配置定时器基础结构体
TIM_DeInit(BASIC_TIM);
//自动重装载值寄存器的值,累计TIM_Period+1个频率后产生一个更新或者中断
TIM_TimeBaseStructure.TIM_Period = BASIC_TIM_Period;//设置周期为1000us
//时钟预分频数
TIM_TimeBaseStructure.TIM_Prescaler = BASIC_TIM_Prescaler;//分频数72
//时钟分频因子
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
//计数器计数模式,设置向上计数,
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up;
//重复计数器的值
// TIM_TimeBaseStructure.TIM_RepetitionCounter=0 ;
TIM_TimeBaseInit(BASIC_TIM, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
// TIM_ClearFlag(BASIC_TIM, TIM_FLAG_Update); //清除更新中断,免得一打开中断立即产生中断
TIM_ClearITPendingBit(BASIC_TIM, TIM_FLAG_Update); //清除更新中断,免得一打开中断立即产生中断
TIM_ITConfig(BASIC_TIM,TIM_IT_Update,ENABLE); //打开定时器更新中断
NVIC_Config();
TIM_Cmd(BASIC_TIM,DISABLE);
}
void initHcsr04()
{
Hcsr04Init();
//BASIC_TIM_NVIC_Config();
}
static void OpenTimer() //打开定时器
{
// /*清除计数器*/
TIM_SetCounter(BASIC_TIM,0);
msHcCount = 0;
TIM_Cmd(BASIC_TIM,ENABLE);//使能定时器
}
static void CloseTimer() //关闭定时器
{
// /*关闭计数器使能*/
TIM_Cmd(BASIC_TIM,DISABLE);
}
//定时器2中断服务程序
void TIM2_IRQHandler(void) //TIM3中断
{
// /*判断中断手否真的产生*/
if(TIM_GetITStatus(BASIC_TIM,TIM_IT_Update) != RESET){
/*清除更新中断标志位*/
TIM_ClearITPendingBit(BASIC_TIM,TIM_IT_Update);
msHcCount++;
}
}
//获取定时器时间
u32 GetEchoTimer(void)
{
u32 time = 0;
/*//当回响信号很长是,计数值溢出后重复计数,overCount用中断来保存溢出次数*/
time = msHcCount*1000;//overCount每++一次,代表overCount毫秒,time微妙
time += TIM_GetCounter(BASIC_TIM);//获取计TIM2数寄存器中的计数值,一边计算回响信号时间
TIM6->CNT = 0; //将TIM2计数寄存器的计数值清零
delay_ms(50);
return time;
}
float Hcsr04GetLength(void )
{
/*测5次数据计算一次平均值*/
float length = 0;
float t = 0;
float sum = 0;
u16 i = 0;
while(i != 5){
GPIO_SetBits(GPIOB_ULTR_PORT,GPIOB_ULTR_Tx_PIN);//trig拉高信号,发出高电平
delay_us(20);//持续时间超过10us
GPIO_ResetBits(GPIOB_ULTR_PORT,GPIOB_ULTR_Tx_PIN);
/*Echo发出信号 等待回响信号*/
/*输入方波后,模块会自动发射8个40KHz的声波,与此同时回波引脚(echo)端的电平会由0变为1;
(此时应该启动定时器计时);当超声波返回被模块接收到时,回波引 脚端的电平会由1变为0;
(此时应该停止定时器计数),定时器记下的这个时间即为
超声波由发射到返回的总时长;*/
while(GPIO_ReadInputDataBit(GPIOB_ULTR_PORT,GPIOB_ULTR_Rx_PIN) == 0);//echo等待回响
/*开启定时器*/
OpenTimer();
i = i+1; //每收到一次回响信号+1,收到5次就计算均值
while(GPIO_ReadInputDataBit(GPIOB_ULTR_PORT,GPIOB_ULTR_Rx_PIN) == 1);
/*关闭定时器*/
CloseTimer();
/*获取Echo高电平时间时间*/
t = GetEchoTimer();
length = (float)t/58;//单位时cm
sum += length;
}
length = sum/5;//五次平均值
return length;
}
mian.c
#include "led.h"
#include "delay.h"
#include "ultrasonsic.h"
#include "sys.h"
#include "lcd.h"
#include "usart.h"
#include "beep.h"
int main(void)
{
float length;
delay_init();
uart_init(115200); //初始化串口,波特率115200
LED_Init(); //初始化LED
BEEP_Init();//初始化蜂鸣器
initHcsr04();
LED0 = 1;//上电默认绿灯亮
while(1){
length=Hcsr04GetLength(); //获取距离
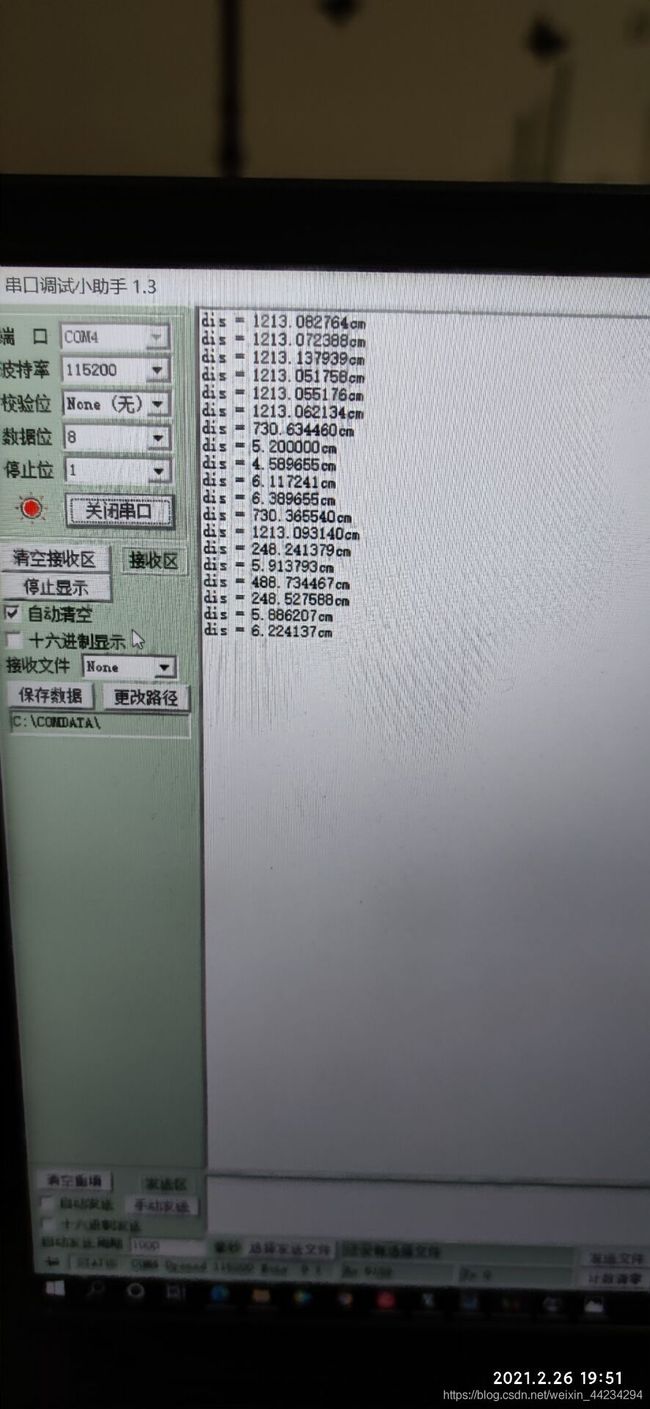
printf("dis = %fcm\r\n",length);//串口打印距离
delay_ms(50);
if(length < 10){
//小于10cm亮红灯绿灯灭
LED0 = 0;
LED1 = 1;
BEEP = 1;
delay_ms(300);
}else{
LED0 = 1;
LED1 = 0;
BEEP = 0;
}
}
}
实验结果
正常距离 亮绿灯
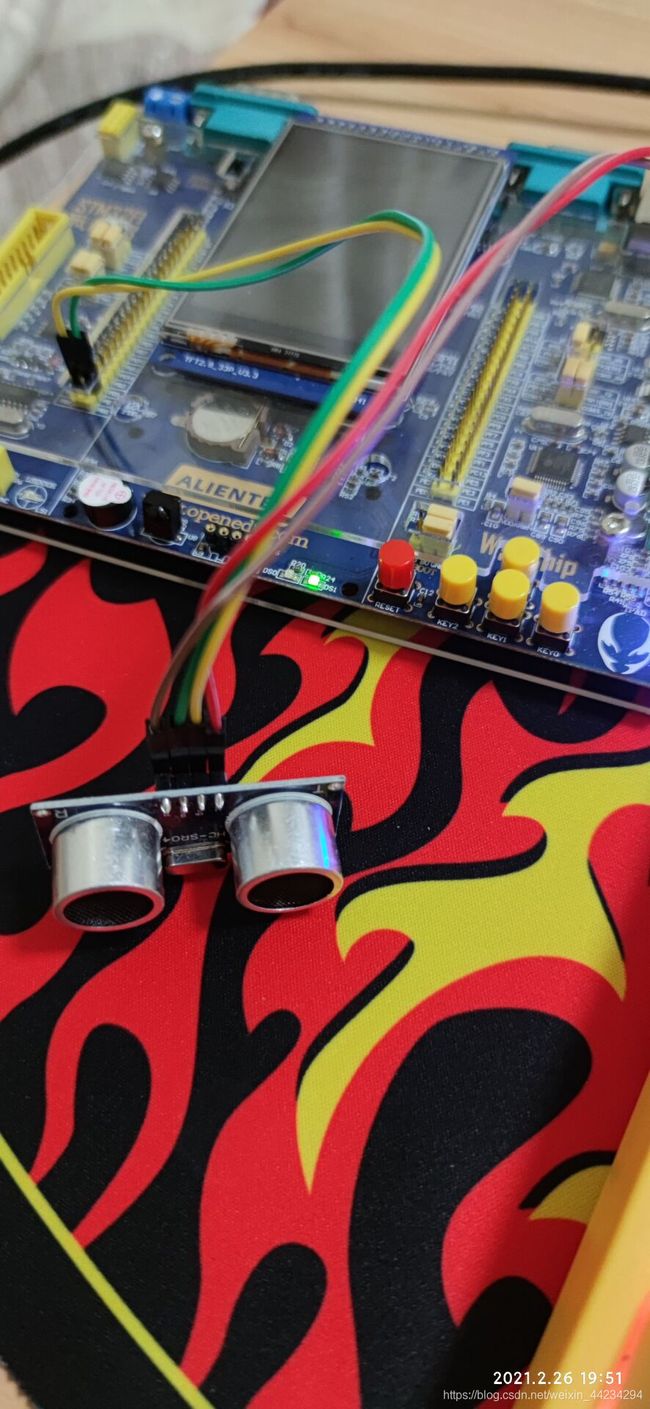
有障碍 亮红灯 蜂鸣器报警

串口显示距离
总结
期间还是遇到不少问题,坚持冲冲冲。后面加入舵机争取把感应垃圾桶做出来!!!