openGauss数据库源码解析系列文章—— 执行器解析(一)
本篇我们开启第七章执行器解析中“7.1 执行器整体架构及代码概览”、“7.2 执行流程”及“7.3 执行算子”的相关精彩内容介绍。
执行器在数据库整个体系结构中起到承上启下的作用,对上承接优化器产生的最优执行计划,并按照执行计划进行流水线式的执行,对底层的存储引擎中的数据进行操作。openGauss数据库将执行的过程抽象成了不同类型的算子,同时结合编译执行、向量化执行、并行执行等方式,组成了全面、高效的执行引擎。本章着重介绍执行器的整体架构、执行模型、各类算子、表达式,以及编译执行和向量化引擎等全新的执行引擎。
7.1 执行器整体架构及代码概览
本节整体介绍执行器的架构和代码。
7.1.1 执行器整体结构
在SQL引擎将用户的查询解析优化成可执行的计划之后,数据库进入查询执行阶段。执行器基于执行计划对相关数据进行提取、运算、更新、删除等操作,以达到用户查询想要实现的目的。
openGauss在行计算引擎的基础上,增加了编译执行引擎和向量化执行引擎,执行器模块架构如图7-1所示。openGauss的执行器采用的是火山模型(volcano model),这是一种经典的流式迭代模型(pipeline iterator model),目前主流的关系型数据库大多采用这种执行模型。
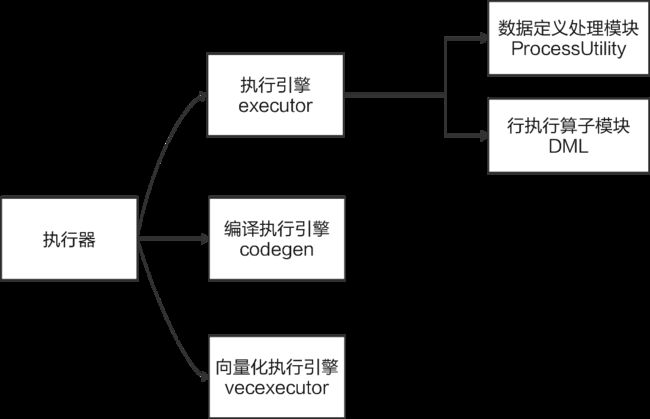
执行器包括四个主要的子模块:Portal、ProcessUtility、executor和特定功能子模块。首先在Portal模块中根据优化器的解析结果,选择相应的处理策略和处理模块(ProcessUtility和executor)。其中executor主要处理用户的增删改查等DML(Data Manipulation Language,数据操作语言)操作。然后ProcessUtility处理增删改查之外的其他各种情况,例如各类DDL(data definition language,数据定义语言)语句、游标操作、事务相关操作、表空间操作等。
7.1.2 火山模型
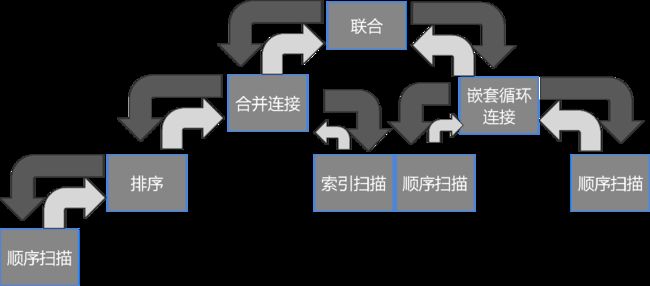
执行器(executor)的输入是优化器产生的计划树(plan tree),计划树经过执行器转换成执行状态树。执行状态树的每一个节点对应一个独立算子,每个算子都完成一项单一功能,所有算子组合起来,实现了用户的查询目标。在火山模型中,多个算子组成了一个由一个根节点、多个叶子节点和多个中间节点组成的查询树。
每个算子有统一的接口(迭代器模式),从下层的一个或者多个算子获得输入,然后将运算结果返回给上层算子。整个查询执行过程主要是两个流,驱动流和数据流。
驱动流是指上层算子驱动下层算子执行的过程,这是一个从上至下、由根节点到叶节点的过程,如图7-2中的向下的箭头所示。从代码层面来看,即上层算子会根据需要调用下层算子的函数接口,去获取下层算子的输入。驱动流是从跟节点逐层传递到叶子节点。
数据流是指下层算子将数据返回给上层算子的过程,这是一个从下至上,从叶节点到跟节点的过程,如图7-2中的向上的箭头所示。在openGauss中,所有的叶子节点都是都是表数据扫描算子,这些节点是所有计算的数据源头。数据从叶子节点,通过逐层计算,然后从根节点返回给用户。
7.1.3 代码概览
执行器在项目中的源代码路径为:src/gausskernel/runtime。下面是执行器的源码目录。
1) 执行器源码目录
执行器源码目录如表7-1所示。
模块 |
功能 |
|---|---|
Makefile |
编译脚本 |
codegen |
计划编译,加速热点代码执行 |
executor |
执行器核心模块,包括表达式计算、数据定义处理以及行级执行算子 |
vecexecutor |
向量化执行引擎 |
2) 执行器源码文件
执行器源码目录为:src/gausskernel/runtime/模块名。文件如表7-2所示。
模块名 |
源码文件 |
功能 |
|---|---|---|
codegen |
codegenutil |
编译执行辅助工具 |
executor |
执行器 |
|
llvmir |
llvm表达式生成 |
|
vecexecutor |
向量化引擎 |
|
Makefile |
编译配置文件 |
|
executor |
Makefile |
编译配置文件 |
execAmi.cpp |
执行器路由算子 |
|
execCurrent.cpp |
节点控制 |
|
execGrouping.cpp |
支持分组、哈希和聚集操作 |
|
execJunk.cpp |
伪列的支持 |
|
execMain.cpp |
顶层执行器接口 |
|
execMerge.cpp |
处理MERGE指令 |
|
execProcnode.cpp |
分发函数按节点调用相关初始化等函数 |
|
execQual.cpp |
评估资质和目标列表的表达式 |
|
execScan.cpp |
通用的关系扫描 |
|
execTuples.cpp |
元组相关的资源管理 |
|
execUtils.cpp |
多种执行相关工具函数 |
|
functions.cpp |
执行SQL语言函数 |
|
instrument.cpp |
计划执行工具 |
|
lightProxy.cpp |
轻量级执行代理 |
|
nodeAgg.cpp |
聚合算子 |
|
nodeAppend.cpp |
添加算子 |
|
nodeBitmapAnd.cpp |
位图与算子 |
|
nodeBitmapHeapsScan.cpp |
位图堆扫描算子 |
|
nodeBitmapIndexScan.cpp |
位图扫描算子 |
|
nodeBitmapOr.cpp |
位图或算子 |
|
nodeCtescan.cpp |
通用表达式扫描算子 |
|
... |
... |
|
README |
说明文件 |
|
vecnode/vecagg.cpp |
向量聚合算子 |
|
vecnode/vecappend.cpp |
向量添加算子 |
|
vecnode/vecconstraints.cpp |
约束检查 |
|
vecnode/veccstore.cpp |
列存扫描算子 |
|
vecnode/veccstoreindexand.cpp |
列存索引扫描算子 |
|
vecnode/veccstoreindextidscan.cpp |
列存tid扫描算子 |
|
... |
... |
|
vecnode/Readme.md |
说明文件 |
|
vecprimitive/date.inl |
基础数据类型 |
|
vecprimitive/float.inl |
浮点数据类型 |
|
vecprimitive/int4.inl |
4字节整数类型 |
|
vecprimitive/int8.inl |
8字节整数类型 |
|
vecprimitive/numeric.inl |
数值类型 |
|
... |
... |
|
vecprimitive/Readme.md |
说明文件 |
|
vectorsonic/vsonicfilesource.cpp |
读写加速 |
|
vectorsonic/vsonicchash.cpp |
Hash加速 |
|
vectorsonic/vsonichashagg.cpp |
Hash聚合 |
|
vectorsonic/vsonichashjoin.cpp |
Hash连接 |
7.2 执行流程
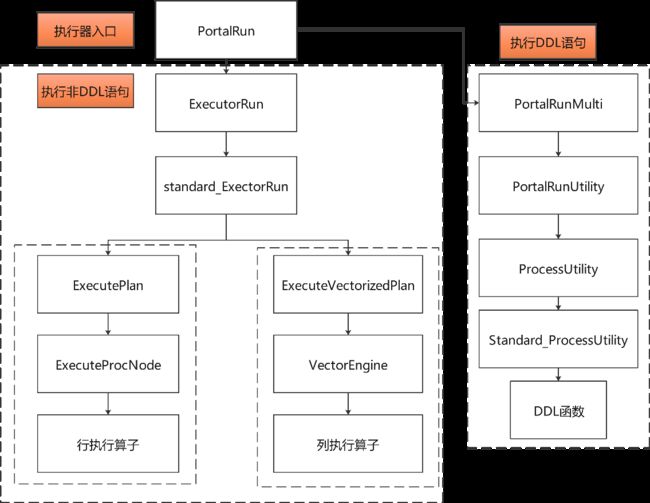
整个执行器的执行流程主要包括了策略选择模块Portal、执行组件executor和ProcessUtility,如图7-3所示。下面逐个进行介绍。
7.2.1 Portal策略选择模块
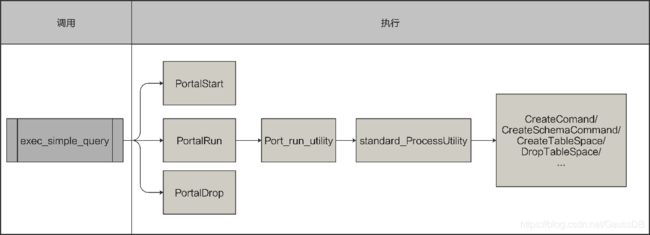
Portal是执行SQL语句的载体,每一条SQL对应唯一的Portal,不同的查询类型对应的Portal类型也有区别,如表7-3所示。SQL语句经过查询编译器处理后会生成优化计划树或非优化计划树,是执行器执行的“原子”操作,执行策略根据需要选择SQL的类型、调用相应的模块。Portal的生命周期管理在exec_simple_query函数中实现,该函数负责Portal创建、执行和清理。Portal执行的主要执行流程包括PortalStart函数、PortalRun函数、PortalDrop函数几个部分。其中PortalStart函数负责进行Portal结构体初始化工作,包括执行算子初始化、内存上下文分配等;PortalRun函数负责真正的执行和运算,它是执行器的核心;PortalDrop函数负责最后的清理工作,主要是数据结构、缓存的清理。
Portal类别 |
SQL类型 |
|---|---|
PORTAL_ONE_SELECT |
SQL语句包含单一的SELECT查询 |
PORTAL_ONE_RETURNING |
INSERT/UPDATE/DELETE语句包含Returning |
PORTAL_ONE_MOD_WITH |
查询语句包含With |
PORTAL_UTIL_SELECT |
工具类型查询语句,如explain |
PORTAL_MULTI_QUERY |
所有其他类型查询语句 |
数据库中的查询主要分为两大类,DDL(CREATE、DROP、ALTER等)查询和DML(SELECT、INSERT、UPDATE、DELETE)查询。这两类查询在执行器中的执行路径存在一定的差异。下面分别介绍这两类查询的主要函数调用关系。
7.2.2 ProcessUtility模块
除了DML之外的所有查询,都通过ProcessUtility模块来执行,包括了各类DDL语句、事务相关语句、游标相关语句等。
DDL查询的上层函数调用为exec_simple_query函数,其中PortalStart函数和PortalDrop函数部分较为简单。核心函数是PortalRun函数下层调用的standard_ProcessUtility函数,该函数通过switch case语句处理了各种类型的查询语句,调用关系如图7-4所示。包括事务相关查询、游标相关查询、schema相关操作、表空间相关操作、表定义相关操作等。
7.2.3 executor模块
DML会被优化器解析并产生成计划树。在执行阶段的上层函数调用和DDL类似,也是exec_simple_query函数。其中PortalStart函数会遍历整个查询计划树,对每个算子进行初始化。算子初始化函数的命名一般是“ExecInit+算子名”的形式,通过这种方式可以方便的查找到对应算子的初始化函数。初始化函数中首先会根据对应的Plan结构初始化一个对应的PlanState结构,这个结构是执行过程中的核心数据结构,包含了在执行过程中需要用的一些数据存储空间以及执行信息。
在PortalRun函数中会实际执行相关的DML查询,对数据进行计算和处理。在执行过程中,所有执行算子分为2大类,行存储算子和向量化算子。这两类算子分别对应行存储执行引擎和向量化执行引擎。行存储执行引擎的上层入口是ExecutePlan函数,向量化执行引擎的上层入口是ExecuteVectorizedPlan函数。其中向量化引擎是针对列存储表的执行引擎,会在7.6小节详细介绍。如果存在行存储表和列存储表的混合计算,那么行存储执行引擎和向量化执行引擎直接可以通过VecToRow和RowToVec算子进行相互转换。行存储算子执行入口函数的命名规则一般为“Exec+算子名”的形式,向量化算子执行入口函数的命名规则一般为“ExecVec+算子名”的形式;通过这样的命名规则,可以快速地找到对应算子的函数入口。
在PortalDrop函数中会调用ExecEndPlan函数对各个算子进行递归清理,主要是清理在执行过程中产生的内存。各个算子的清理函数入口命名规则是“ExecEnd+算子名”以及“ExecEndVec+算子名”,调用关系如图7-5所示。

7.3 执行算子
执行算子模块包含多种计划执行算子,算子类型如表7-4所示,是计划执行的独立单元,用于实现具体的计划动作。执行计划包含4类算子,分别是控制算子、扫描算子、物化算子和连接算子,如表7-4所示。这些算子统一使用节点(node)表示,具有统一的接口,执行流程采用递归模式。整体执行流程是:首先根据计划节点的类型初始化状态节点(函数名为“ExecInit+算子名”),然后再回调执行函数(函数名为“Exec+算子名”),最后是清理状态节点(函数名为“ExecEnd+算子名”)。本节主要介绍行执行算子,面向列存储的算子在后续章节(向量化引擎)介绍。
算子类型 |
说明 |
|---|---|
控制算子 |
处理特殊执行流程,如Union语句 |
扫描算子 |
用于扫描表对象,从表中获取数据 |
物化算子 |
缓存中间执行结果到临时存储 |
连接算子 |
用于实现SQL中的各类join操作,通常包含nested loop join、hash join、merge-sort join等 |
7.3.1 控制算子
控制算子主要用于执行特殊流程,这类流程通常包含两个以上输入,如Union操作,需要把多个子结果(输入),合并成一个。控制算子有多种,如表7-5所示。
算子名称 |
说明 |
|---|---|
Result算子 |
处理只有一个结果或过滤条件是常量 |
Append算子 |
处理包含一个或多个子计划的链表 |
BitmapAnd算子 |
对结果做And位图运算 |
BitmapOr算子 |
对结果做Or位图运算 |
RecursionUnion算子 |
递归处理UNION语句 |
1. Result算子
Result算子对应的代码源文件是“nodeResult.cpp”,用于处理只有一个结果(如通过SELECT调用可执行函数或表达式,或者INSERT语句只包含Values字句)或者WHERE表达式中的结果是常量(如“SELECT * FROM emp WHERE 2 > 1”,过滤条件“2 > 1”是常量只需要计算一次即可)的流程。由于openGauss没有提供单独的投影算子(Projection)和选择算子(Selection),Result算子也可以起到类似的作用。
Result算子提供的主要函数如表7-6所示。
主要函数 |
说明 |
|---|---|
ExecInitResult |
初始化状态机 |
ExecResult |
迭代执行算子 |
ExecEndResult |
结束清理 |
ExecResultMarkPos |
标记扫描位置 |
ExecResultRestrPos |
重置扫描位置 |
ExecReScanResult |
重置执行计划 |
ExecInitResult函数初始化Result状态节点,主要执行流程如下。
(1) 构造状态节点,构造ResultState状态结构。
(2) 初始化元组表。
(3) 初始化子节点表达式(生成目标列表的表达式、过滤表达式和常量表达式)。
(4) 初始化左子节点(右子节点是空)。
(5) 初始化元组类型和投影信息。
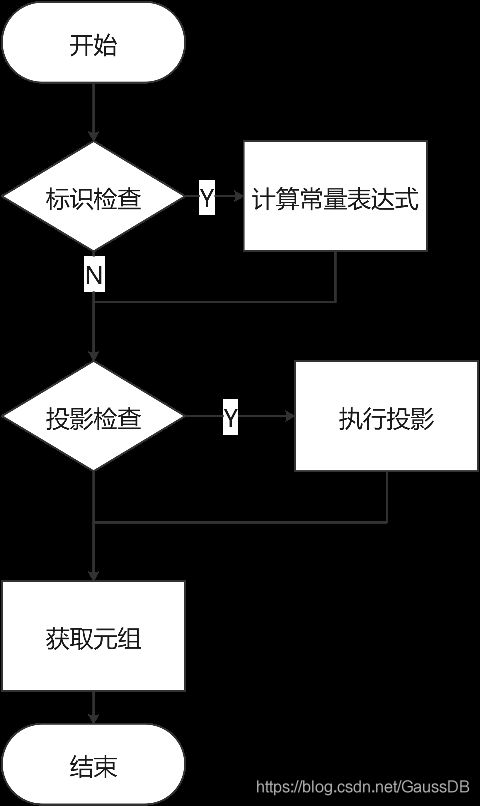
ExecResult函数迭代输出元组,流程图如图7-6所示,主要执行流程如下。
(1) 检查是否需要做常量表达式计算,如果之前没有做常量表达式计算则需要计算表达式并设置检查标识(如果常量表达式计算结果为false,则设置约束检查标识位)。
(2) 判断是否需要做投影处理,如果返回结果是集合,则把投影结果直接返回。
(3) 执行元组获取。
ExecEndResult函数是在执行计划执行结束时调用,用于释放执行过程申请的资源(存储空间)。
2. Append算子
Append算子对应的代码源文件是“nodeAppend.cpp”,用于处理包含一个或多个子计划的链表。Append遍历子计划链表逐个执行子计划,当子计划返回全部结果后,迭代执行下一个子计划。Append算子通常用于SQL中的集合操作中,例如多个Union All操作,可以对多个子查询的结果取并集;另外Append算子还可以用来实现继承表的查询功能。
Append算子提供的主要函数如表7-7所示。
主要函数 |
说明 |
|---|---|
ExecInitAppend |
初始化Append节点 |
ExecAppend |
迭代获取元组 |
ExecEndAppend |
关闭Append节点 |
ExecReScanAppend |
重新扫描Append节点 |
exec_append_initialize_next |
为下一个扫描节点设置状态 |
ExecInitAppend函数初始化Append状态节点,主要执行流程如下。
(1) 初始化Append执行状态节点(AppendState)。
(2) 迭代初始化子计划链表(初始化每一个子计划)。
(3) 设置初始迭代子计划。
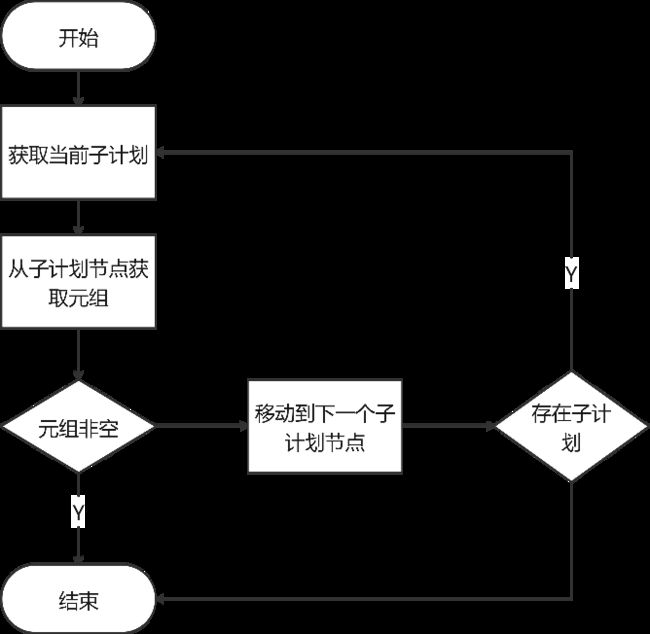
ExecAppend函数迭代输出元组,是Append算子主体函数。每次从子计划中获取一条元组,直到返回元组为空,则移到下一个子计划(使用as_whichplan标记),直至所有子计划都全部执行完。执行流程如图7-7所示。
ExecEndAppend函数负责Append节点清理,遍历子计划数组,逐一释放子计划对应的资源。
3. BitmapAnd算子
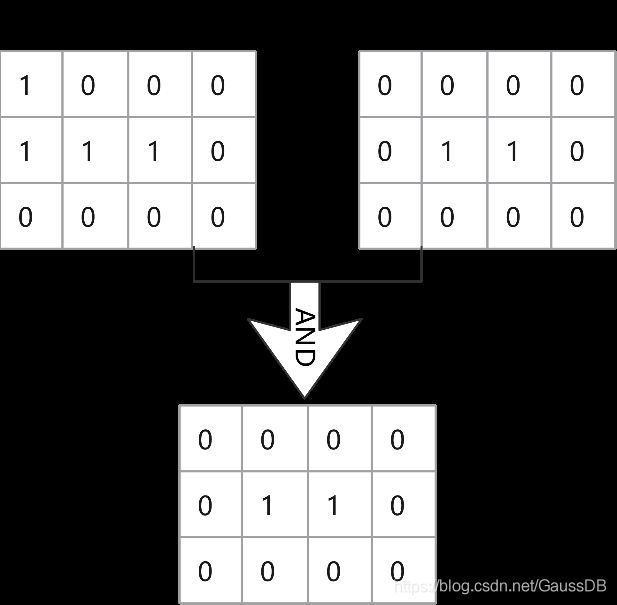
BitmapAnd算子对应的代码源文件是“nodeBitmapAnd.cpp”,用于对多个属性约束都有索引,且属性约束是And运算,对结果做And位图运算。例如:(colA约束条件)AND (colB约束条件),且colA,colB建有索引,colA对应的位图是Bitmap A,colB对应的位图是Bitmap B。位图运算如图7-8所示。
BitmapAnd算子提供的主要函数如表7-8所示。
主要函数 |
说明 |
|---|---|
ExecInitBitmapAnd |
BitmapAnd节点初始化 |
MultiExecBitmapAnd |
获取Bitmap节点 |
ExecEndBitmapAnd |
关闭BitmapAnd节点 |
ExecReScanBitmapAnd |
重新扫描BitmapAnd节点 |
ExecInitBitmapAnd函数主要执行流程:首先创建Bitmapand状态节点;然后再逐一初始化子计划状态节点。
MultiExecBitmapAnd函数是BitmaAnd计划节点的主体函数,通过迭代方式做求交运算,结果集是一个新的节点。
ExecEndBitmapAnd函数是计划节点退出函数,负责关闭BitmapAnd子计划节点。
4. BitmapOr算子
BitmapOr节点同BitmapAnd节点类似,主要差异是BitmapAnd对子计划结果做求交计算(tbm_intersect),而BitmapOr是对子计划结果做并集计算(tbm_union)。BitmapOr算子提供的主要函数如表7-9所示。
主要函数 |
说明 |
|---|---|
ExecInitBitmapOr |
BitmapOr节点初始化 |
MultiExecBitmapOr |
获取Bitmap节点 |
ExecEndBitmapOr |
关闭BitmapOr节点 |
ExecReScanBitmapOr |
重新扫描BitmapOr节点 |
5. RecursiveUnion算子
RecursiveUnion算子对应的代码源文件是“nodeRecursiveUnion.cpp”,用于递归处理UNION语句。
下面给出一个例子,用SQL实现1到10递归求和,语句如下:
/* 递归求和 */
WITH RECURSIVE t_recursive_union(i)AS(
VALUES (0)
UNION ALL
SELECT i + 1 FROM t_recursive_union WHERE i < 10)
SELECT sum(i) FROM t_recursive_union;
/* 查询计划 */
Aggregate
CTE t_recursive_union
-> Recursive Union
-> Values Scan on "*VALUES*"
-> WorkTable Scan on t_recursive_union
Filter: (i < 10)
-> CTE Scan on t_recursive_union
上述例子由RecursiveUnion算子处理,初始数据是VALUSE (0),然后再递归部分处理输出,即“SELECT i + 1 FROM t_recursive_union WHERE i < 10”。
RecursiveUnion使用左子树获取初始元组(初始迭代种子),使用右子树递归输出其余元组。RecursiveUnion算子提供的主要函数如表7-10所示。
主要函数 |
说明 |
|---|---|
ExecInitRecursiveUnion |
初始化RecursiveUnion状态节点 |
ExecRecursiveUnion |
迭代输出元组 |
ExecEndRecursiveUnion |
清理RecursiveUnion节点 |
ExecReScanRecursiveUnion |
重置RecursiveUnion节点 |
ExecReScanRecursivePlanTree |
重置RecursiveUnion计划树 |
RecursiveUnion算子对应的关键结构体代码如下:
typedef struct RecursiveUnion
{
Planplan;
intwtParam;/* 对应的工作表ID */
intnumCols;/* 去重属性个数 */
AttrNumber *dupColIdx;/* 去重判断属性编号 */
Oid *dupOperators;/* 去重判断函数 */
Oid *dupCollations;
longnumGroups;/* 元组树估算 */
} RecursiveUnion;
ExecInitRecursiveUnion函数的主要执行流程如下。
(1) 构造递归合并状态节点,并初始化工作表(working_table)和缓存表(intermediate_table),如果需要去除重复则需要构造哈希表上下文。
(2) 初始化左子节点(用于输出初始元组作为迭代种子)和右子节点(用于迭代输出其他满足迭代条件的元组)。
(3) 创建用于去重的哈希表。
ExecRecursiveUnion函数是RecursiveUnion节点的主体函数,它的主要执行流程是:
(1) 执行左子节点,将获取元组直接返回(左子节点用于输出初始迭代种子);如需要去重则把元组加入哈希表中。
(2) 当处理完左节点(所有的初始种子已经输出),则执行右子节点获取其余元组,在执行右子节点时会逐一从工作表(working_table)获取迭代输入,并把非空的元组放入缓存表(intermediate_table)。
(3) 当工作表为空时,则把缓存表作为新的工作表,直至所有的元组都输出(缓存表和工作表都为空),如需要去重则把元组加入哈希表中。
ExecEndRecursiveUnion是清理函数,负责释放执行过程申请的存储资源(用于去重的哈希表),并关闭左子节点和右子节点。
7.3.2 扫描算子
扫描算子用于表、结果集、链表子查询等结果遍历,每次获取一条元组作为上层节点的输入。控制算子中的BitmapAnd/BitmapOr函数所需的位图与扫描算子(索引扫描算子)密切相关。主要包括顺序扫描(SeqScan)、索引扫描(IndexScan)、位图扫描(BitmapHeapScan)、位图索引扫描(BitmapIndexScan)、元组TID扫描(TIDScan)、子查询扫描(SubqueryScan)、函数扫描(FunctionScan)等。扫描算子如表7-11所示。
算子名称 |
说明 |
|---|---|
SeqScan算子 |
用于扫描基础表 |
IndexScan算子 |
对表的扫描使用索引加速元组获取 |
BitmapIndexScan算子 |
通过位图索引做扫描操作 |
TIDScan算子 |
遍历元组的物理存储位置获取一个元组 |
SubqueryScan算子 |
子查询生成的子执行计划 |
FunctionScan算子 |
用于从函数返回的数据集中获取元组 |
ValuesScan算子 |
用于处理“Values (…),(…), …”类型语句,从值列表中输出元组 |
CteScan算子 |
用于处理With表达式对应的子查询 |
WorkTableScan算子 |
用于递归工作表元组输出 |
PartIterator算子 |
用于支持分区表的wise join |
IndexOnlyScan算子 |
如索引的键值满足了查询中所有表达式的需求,可以通过只对索引扫描获得元组,避免对堆表(Heap)的访问 |
ForeignScan算子 |
扫描外部数据表 |
1. SeqScan算子
SeqScan算子是最基本的扫描算子,对应SeqScan执行节点,对应的代码源文件是“nodeSeqScan.cpp”,用于对基础表做顺序扫描。算子对应的主要函数如表7-12所示。
主要函数 |
说明 |
|---|---|
ExecInitSeqScan |
初始化SeqScan状态节点 |
ExecSeqScan |
迭代获取元组 |
ExecEndSeqScan |
清理SeqScan状态节点 |
ExecSeqMarkPos |
标记扫描位置 |
ExecSeqRestrPos |
重置扫描位置 |
ExecReScanSeqScan |
重置SeqScan |
InitScanRelation |
初始化扫描表 |
ExecInitSeqScan函数初始化SeqScan状态节点,负责节点状态结构构造,并初始化用于存储结果的元组表。
ExecSeqScan函数是SeqScan算子执行的主体函数,用于迭代获取每一个元组。ExecSeqScan函数通过回调函数调用SeqNext函数、HbktSeqSampleNext函数、SeqSampleNext函数实现获取元组。非采样获取元组时调用SeqNext函数;如果需要采样且对应的表采用哈希桶方式存储则调用HbktSeqSampleNext函数,否则调用SeqSampleNext函数。
2. IndexScan算子
IndexScan算子是索引索引扫描算子,对应IndexScan计划节点,相关的代码源文件是“nodeIndexScan.cpp”文件。如果过滤条件涉及索引,查询计划对表的扫描使用IndexScan算子,利用索引加速元组获取。算子对应的主要函数如表7-13所示。
主要函数 |
说明 |
|---|---|
ExecInitIndexScan |
初始化IndexScan状态节点 |
ExecIndexScan |
迭代获取元组 |
ExecEndIndexScan |
清理IndexScan状态节点 |
ExecIndexMarkPos |
标记扫描位置 |
ExecIndexRestrPos |
重置扫描位置 |
ExecReScanIndexScan |
重置IndexScan |
ExecInitIndexScan函数负责初始化IndexScan状态节点。主要执行流程如下。
(1) 创建IndexScanState节点。
(2) 初始化子节点,初始化目标列表、索引过滤条件、原始过滤条件。
(3) 打开对应表。
(4) 打开索引。
(5) 构建索引扫描Key。
(6) 处理ORDER BY对应的Key。
(7) 启动索引扫描(返回索引扫描描述符IndexScanDesc)。
(8) 把过滤Key传递给索引器。
ExecIndexScan函数负责迭代获取元组,通过回调函数的形式调用IndexNext函数获取元组。IndexNext函数首先按照扫描Key获取元组,然后再执行表达式indexqualorig判断元组是否满足过滤条件,如果不满足则需要继续获取。
ExecEndIndexScan函数负责清理IndexScanState节点。主要执行流程如下。
(1) 清理元组占用的槽位。
(2) 关闭索引扫描描述子。
(3) 关闭索引(如果是分区表则需要关闭分区索引及分区映射)。
(4) 关闭表。
3. BitmapIndexScan算子
BitmapIndexScan算子通过位图索引做扫描操作,利用位图记录元组在存储页面的偏移位置,对应BitmapIndexScan计划节点。BitmapIndexScan算子相关的代码源文件是“nodeBitmapIndexScan.cpp”。BitmapIndexScan执行的结果是位图,该算子配合BitmapHeapScan算子获取位图对应的元组。算子对应的主要函数如表7-14所示。
主要函数 |
说明 |
|---|---|
ExecInitBitmapIndexScan |
初始化BitmapIndexScan状态节点 |
MultiExecBitmapIndexScan |
获取所有元组位图 |
ExecEndBitmapIndexScan |
清理BitmapIndexScan状态节点 |
ExecReScanIndexScan |
重置BitmapIndexScan |
ExecInitPartitionForBitmapIndexScan |
初始化分区表类型 |
BitmapIndexScan算子对应的状态节点代码如下:
typedef struct BitmapIndexScanState {
ScanState ss; /* 节点状态标识 */
TIDBitmap* biss_result; /* 位图:扫描结果集 */
ScanKey biss_ScanKeys; /* 索引扫描过滤表达式 */
int biss_NumScanKeys; /* 索引扫描键数量 */
IndexRuntimeKeyInfo* biss_RuntimeKeys; /* 索引扫描运行时求值表达式 */
int biss_NumRuntimeKeys; /* 运行时索引扫描键数量 */
IndexArrayKeyInfo* biss_ArrayKeys;/* 扫描键数组 */
int biss_NumArrayKeys; /* 数组长度 */
bool biss_RuntimeKeysReady; /* 运行时扫描键已经计算标识 */
ExprContext* biss_RuntimeContext; /* 求值表达式上下文 */
Relation biss_RelationDesc; /* 索引描述 */
List* biss_IndexPartitionList; /* 分区表对应索引 */
LOCKMODE lockMode; /* 锁模式 */
Relation biss_CurrentIndexPartition; /* 当前对应分区索引 */
} BitmapIndexScanState;
ExecInitBitmapIndexScan函数初始化BitmapIndexScan状态节点(BitmapIndexScanState)。主要执行流程如下。
(1) 创建BitmapIndexScanState节点用于存储状态信息。
(2) 打开索引。
(3) 构建索引扫描Key。
(4) 启动索引扫描(返回索引扫描描述符IndexScanDesc)。
(5) 把过滤Key传递给索引器。
MultiExecBitmapIndexScan函数返回所有元组位图。主要执行流程如下。
(1) 准备Bitmap结果集,用于存储元组ID。
(2) 步循环批量获取元组并存储于Bitmap结果集。如果有多组过滤Key(使用函数ExecIndexAdvanceArrayKeys判断)则继续循环批量获取元组。
4. BitmapHeapScan算子
BitmapHeapSan算子通过位图(BitmapIndexScan的输出)获取实际的元组,对应的代码源文件是“BitmapHeap.cpp”。算子对应的主要函数如表7-15所示。
主要函数 |
说明 |
|---|---|
ExecInitBitmapHeapScan |
初始化BitmapHeapScan状态节点 |
ExecBitmapHeapScan |
迭代获取元组 |
ExecEndBitmapHeapScan |
清理BitmapHeapScan状态节点 |
ExecReScanBitmapHeapScan |
重置BitmapHeapScan |
BitmapHeapScan算子对应的状态节点代码如下:
typedef struct BitmapHeapScanState {
ScanState ss; /* 节点标识 */
List* bitmapqualorig; /* 元组过滤条件 */
TIDBitmap* tbm; /* 位图:来自BitmapIndexScan节点输出 */
TBMIterator* tbmiterator; /* 位图迭代器 */
TBMIterateResult* tbmres; /* 迭代结果 */
TBMIterator* prefetch_iterator; /* 预抓取迭代器 */
int prefetch_pages; /* 预获取页面数量 */
int prefetch_target; /* 当前获取页面 */
} BitmapHeapScanState;
ExecInitBitmapHeapScan函数负责初始化BitmapHeapScan状态节点(BitmapHeapScanState)。主要执行流程如下。
(1) 创建BitmapHeapScanState状态节点。
(2) 初始化子节点,初始化目标列表、索引过滤条件、原始过滤条件。
(3) 打开对应表。
(4) 初始化元组槽位并设置元组迭代获取函数。
(5) 启动表扫描(返回表扫描描述符TableScanDesc)。
(6) 初始化左子节点(左子节点负责执行位图索引扫描,并返回位图)。
ExecBitmapHeapScan函数负责迭代输出元组。使用回调函数获取元组,依照表的类型调用BitmapHeapTblNext函数或BitmapHbucketTblNext(哈希桶类型)函数。BitmapHeapTblNext函数的主要执行流程是:首先初始化位图,然后使用位图迭代器tbmres获取元组偏移位置,最后从缓冲区获取元组slot。
ExecEndBitmapHeapScan函数负责清理BitmapHeapScan状态节点,清理流程类似于ExecEndIndexScan函数。
5. TIDScan算子
TIDScan算子用于通过遍历元组的物理存储位置获取每一个元组(TID由块编号和偏移位置组成),对应TIDScanState计划节点,相应的代码源文件是“nodeTIDScan.cpp”。算子对应的主要函数如表7-16所示。
主要函数 |
说明 |
|---|---|
ExecInitTidScan |
初始化TIDScan状态节点 |
ExecTidScan |
迭代获取元组 |
ExecEndTidScan |
清理TIDScan状态节点 |
ExecReScanTidScan |
重置TIDScan |
TID扫描算子对应的状态节点代码如下:
typedef struct TidScanState {
ScanState ss; /* 节点标识 */
List* tss_tidquals; /* tid过滤表达式 */
bool tss_isCurrentOf; /* 游标同当前扫描表是否匹配 */
Relation tss_CurrentOf_CurrentPartition; /* 当前扫描分区 */
int tss_NumTids; /* tid数量 */
int tss_TidPtr; /* 当前扫描位置 */
int tss_MarkTidPtr; /* 标记扫描位置 */
ItemPointerData* tss_TidList; /* tid列表 */
HeapTupleData tss_htup; /* 堆元组 */
HeapTupleHeaderData tss_ctbuf_hdr; /* 堆元组头信息 */
} TidScanState;
ExecInitTidScan是TIDScan节点状态初始化函数。主要执行流程如下。
(1) 创建TidScanState节点。
(2) 初始化子节点,初始化目标列表、索引过滤条件、原始过滤条件。
(3) 打开对应表。
(4) 初始化结果元组;
(5) 启动表扫描(返回表扫描描述符TableScanDesc)。
ExecTidScan是元组迭代获取函数,通过调用TidNext函数实现功能。TidNext函数首先获取Tid列表,并存放到tss_TidList数组中,根据heap_relation调用TidFetchTuple函数或HbtTidFetchTuble函数(哈希桶类型)中逐一获取元组(tss_TidPtr是tid在数组中的相对偏移位置,使用函数InitTidPtr移动偏移位置)。
6. SubqueryScan算子
SubqueryScan算子以子计划为扫描对象,实际执行会转换成调用子节点计划,对应的代码源文件是“nodeSubqueryScan.cpp”。SubqueryScan状态节点初始由ExecInitSubqueryScan函数完成。ExecInitSubqueryScan函数首先创建SubqueryScan状态节点,然后初始化子计划(调用ExecInitNode函数实现)。ExecSubqueryScan函数负责迭代输出元组,通过调用函数SubqueryNext实现,在SubqueryNext函数中使用ExecProcNode函数执行子节点计划。算子对应的主要函数如表7-17所示。
主要函数 |
说明 |
|---|---|
ExecInitSubqueryScan |
初始化SubqueryScan状态节点 |
ExecSubqueryScan |
迭代获取元组(执行子节点计划) |
ExecEndSubqueryScan |
清理SubqueryScan状态节点 |
ExecResScanSubquerScan |
重置SubqueryScan状态节点 |
7. FunctionScan算子
FunctionScan算子用于从函数返回的数据集中获取元组,对应的代码源文件是“nodeFunctionScan.cpp”。算子对应的主要函数如表7-18所示。
主要函数 |
说明 |
|---|---|
ExecInitFunctionScan |
初始化FunctionScan状态节点 |
ExecFunctionScan |
迭代获取元组(函数返回元组) |
ExecEndFunctionScan |
清理FunctionScan状态节点 |
ExecResScanFunctionScan |
重置FunctionScan状态节点 |
ExecInitFunctionScan函数负责初始化FunctionScan状态节点。主要执行流程如下。
(1) 构造FuctionScan状态节点。
(2) 初始化目标表达式和过滤条件表达式。
(3) 根据functypclass的类型构造元组表述符(函数返回元组)。
ExecFunctionScan函数负责迭代输出函数返回元组。主要执行流程如下。
(1) 初始化tuplestorestate(首次执行存储函数执行的全量结果)。
(2) 从tuplestorestate逐一取出元组。
8. ValuesScan算子
ValuesScan算子用于处理“Values (…),(…), …”类型语句,从值列表中输出元组,对应与ValuesScan计划节点,相关的代码源文件是“nodeValuesScan.cpp”。values_lists数组存储值表达式列表。算子对应的主要函数如表7-19所示。
主要函数 |
说明 |
|---|---|
ExecInitValuesScan |
初始化ValuesScan状态节点 |
ExecValuesScan |
迭代获取元组 |
ExecEndValuesScan |
清理ValuesScan状态节点 |
ExecValuesMarkPos |
标记扫描位置 |
ExecEndValuesRestrPos |
重置扫描位置 |
ExecResScanValuesScan |
重置ValuesScan状态节点 |
ExecInitValuesScan函数初始化ValuesScan状态节点,该函数把值表达式链表转换成表达式数组,该表达式数组即为元组集合。
ExecValuesScan函数迭代输出元组,通过回调函数调用ValuesNext函数实现,curr_idx字段是偏移位置,从exprlists数组中逐一取出数值构造元组。
9. CteScan算子
CteScan算子用于处理With表达式对应的子查询,对应于CteScan计划节点,相应的代码源文件是“nodeCteScan.cpp”。算子对应的主要函数如表7-20所示。
主要函数 |
说明 |
|---|---|
ExecInitCteScan |
初始化CteScan状态节点 |
ExecCteScan |
迭代获取元组 |
ExecEndCteScan |
清理CteScan状态节点 |
ExecResScanCteScan |
重置CteScan状态节点 |
ExecInitCteScan函数初始化CteScan状态节点。主要执行流程如下。
(1) 获得Cte计划节点。
(2) 根据全局参数prmdata(所有CteScan子计划共享)判断当前CteScan计划是否为起始Cte,如果是则构造cte_table用于缓存。
(3) 初始化目标表达式和条件过滤表达式。
(4) 初始化元组用于缓存。
ExecCteScan函数用于迭代获取元组,通过回调函数调用CteScanNext实现。主要执行流程是:首先判断缓存数组中是否有未取元组,如果有则取出返回(使用tuplestore_gettupleslot函数),否则执行子计划获取元组。
10. WorkTableScan算子
WorkTableScan算子用于处理递归项,同RecursiveUnion算子紧密关联,对应的代码源文件是“nodeWorkTableScan.cpp”。WorkTableScan算子处理RecursiveUnion子节点中的工作表,提供了对缓存扫描的支持。算子对应的主要函数如表7-21所示。
主要函数 |
说明 |
ExecInitWorkTableScan |
初始化WorkTableScan状态节点 |
ExecWorkTableScan |
迭代获取元组 |
ExecEndWorkTableScan |
清理WorkTableScan状态节点 |
ExecResScanWorkTableScan |
重置WorkTableScan状态节点 |
11. PartIterator算子
PartIterator算子用于支持分区wise join,从分区中迭代获取元组,对应的代码源文件是“nodePartIterator.cpp”。PartIterator算子通过执行子节点计划获取分区遍历获取元组。算子对应的主要函数如表7-22所示。
主要函数 |
说明 |
ExecInitPartIteratorScan |
初始化PartIteratorScan状态节点 |
ExecPartIteratorScan |
迭代获取元组 |
ExecEndPartIteratorScan |
清理PartIteratorScan状态节点 |
ExecResScanPartIteratorScan |
重置PartIteratorScan状态节点 |
分区遍历关键数据结构代码如下:
typedef struct PartIterator {
Plan plan;
PartitionType partType; /* 分区类型 */
int itrs; /* 分区数量 */
ScanDirection direction;
PartIteratorParam* param;
int startPartitionId; /* 并行执行起始分区ID */
int endPartitionId; /* 并行执行分区结束ID */
} PartIterator;
typedef struct PartIteratorState {
PlanState ps; /* 状态节点类型 */
int currentItr; /* 当前迭代分区索引编号 */
} PartIteratorState;
ExecInitPartIteratorScan函数用于初始化PartIteratorScan状态节点(PartIteratorState),功能是初始化左子节点并设置初始迭代分区索引号。
ExecPartIteratorScan函数迭代输出元组。主要执行流程是:首先初始化分区索引号,执行左子节点获取元组,如果元组为空则获取下一个分区的元组。
7.3.3 物化算子
物化算子用于把元组缓存起来供后续使用。物化算子有多种类型,将介绍部分物化算子。如表7-23所示。
算子名称 |
说明 |
Material算子 |
用于缓存子节点执行结果 |
Sort算子 |
用于元组排序(查询包含ORDER BY) |
Limit算子 |
用于限定获取元组数量(查询包含LIMIT/OFFSET子句) |
Group算子 |
用于处理ORDER BY子句 |
Agg算子 |
用于执行含有聚集函数的操作 |
Unique算子 |
用于对子计划返回的元组去重 |
hash算子 |
提供哈希表创建接口 |
Setop算子 |
处理Execept与Intersect两种集合操作 |
WindowAgg算子 |
处理元组窗口聚合 |
LockRows算子 |
用于处理子句包含“FOR UPDATE/FOR SHARE” |
1. Material算子
Material算子用于缓存子节点执行结果,对应的代码源文件是“nodeMaterial.cpp”。Material算子使用函数tuplestorestate缓存迭代输出的元组。算子对应的主要函数如表7-24所示。
主要函数 |
说明 |
ExecInitMaterial |
初始化Material状态节点 |
ExecMaterial |
迭代获取元组 |
ExecEndMaterial |
清理Material状态节点 |
ExecResScanMaterial |
重置Material状态节点 |
ExecInitMaterial函数用于初始化Material状态节点,并初始化左子节点。
ExecMaterial函数用于迭代获取元组。根据计划选择ExecMaterialOne函数和ExecMaterialAll函数输出元组:ExecMaterialOne函数从子计划中迭代获取一个元组并放入tuplestorestate对象中;ExecMaterialAll函数从子计划中迭代获取所有的元组并存储在tuplestorestate对象中。
ExecEndMaterial函数是清理函数,主要清理元组缓存。
2. Sort算子
Sort算子用于执行排序计划节点(即SQL语句中的ORDER BY命令),对应的代码源文件是“nodeSort.cpp”。算子对应的主要函数如表7-25所示。
主要函数 |
说明 |
ExecInitSort |
初始化Sort状态节点 |
ExecSort |
迭代获取元组 |
ExecEndSort |
清理Sort状态节点 |
ExecSortMarkPos |
用于标记排序位置 |
排序算子对应的结构体是SortState,该结构体代码如下:
typedef struct SortState {
ScanState ss; /* 扫描节点 */
bool randomAccess; /* 随机访问标识*/
bool bounded; /* 结果集边界标识 */
int64 bound; /* 结果集中总数 */
bool sort_Done; /* 排序完成标识 */
bool bounded_Done; /* 结果集边界设置标识 */
int64 bound_Done; /* 参与排序的数据集 */
void* tuplesortstate; /* 排序表 */
int32 local_work_mem; /* 内存使用 */
int sortMethodId; /* 所用排序方法(explain) */
int spaceTypeId; /* 空间类型(explain) */
long spaceUsed; /* 所用空间大小(explain) */
int64* space_size; /* 临时表外溢大小 */
} SortState;
ExecInitSort函数用于初始化排序节点,创建排序时的状态信息。主要执行流程如下。
(1) 创建Sort状态结构体,生成排序状态节点(SortState)。
(2) 对结果元组表初始化(分别调用“ExecInitResultTupleSlot(estate,&sortstate->ss.ps)”函数和“ExecInitScanTupleSlot(estate,&sortstate->ss)”函数)。
(3) 初始化子节点。
(4) 初始化元组类型。
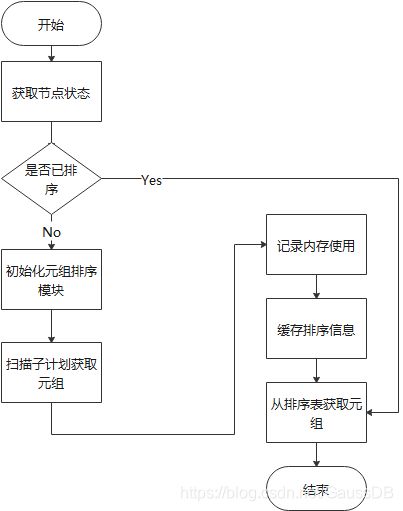
ExecSort函数是执行排序的主函数。主要执行流程是:
(1) 判断排序状态节点是否已经做过排序,如果没有做过排序,需要调用tuplesort函数做一次全部排序。
(2) 使用tuplesort函数做排序的流程是先初始化堆排序,然后调用tuplesort_performsort函数执行排序。
(3) 根据排序执行节点的逐一读取元组。
ExecSort函数的执行流程如图7-9所示。
ExecEndSort函数用于释放排序过程使用的资源。主要执行流程是:首先释放用于存放中间元组的排序表,然后清理结果表,最后关闭排序执行计划。
ExecSortMarkPos函数用于标记排序位置。ExecSortRestrPos函数用于恢复保存的排序文件。ExecReScanSort函数用于重置排序结果。
3. Limit算子
Limit算子节点主要用来处理LIMIT/OFFSET子句,用于限制子查询语句处理元组的数量,对应的代码源文件是“nodeLimit.cpp”。算子对应的主要函数如表7-26所示。
主要函数 |
说明 |
ExecInitLimit |
初始化Limit状态节点 |
ExecLimit |
迭代获取元组 |
ExecEndLimit |
清理Limit状态节点 |
recompute_limits |
初始化limit/offset表达式 |
Limit算子对应的关键结构体是LimitState,相关代码如下:
typedef struct LimitState {
PlanState ps; /* 计划状态节点*/
ExprState* limitOffset; /* 偏移位置*/
ExprState* limitCount; /* 总数 */
int64 offset; /* 当前偏移位置 */
int64 count; /* 当前总数 */
bool noCount; /* 忽略总数标识 */
LimitStateCond lstate; /* 状态机当前状态 */
int64 position; /* 上一个元组的位置 */
TupleTableSlot* subSlot; /* 上一个元组 */
} LimitState;
ExecInitLimit函数用于把Limit计划节点转成Limit执行节点。主要执行流程如下。
(1) 初始化Limit状态节点(LimitState)并做子表达式处理,分别初始化limitOffset(调用“ExecInitExpr((Expr*)node->limitOffset, (PlanState*)limit_state)”函数)和limitCount(调用“ExecInitExpr((Expr*)node->limitCount, (PlanState*)limit_state);”函数)表达式。
(2) 调用“ExecInitResultTupleSlot(estate, &limit_state->ps)”函数做元组初始化。
(3) 外部计划初始化(调用“outer_plan = outerPlan(node); outerPlanState(limit_state) = ExecInitNode(outer_plan, estate, eflags);”函数)。
(4) 对投影信息置空(由于Limit无投影)。
ExecLimit是执行Limit算子的入口,每次返回一个元组。在函数体内部通过“switch (node->lstate) ”函数来处理Limit算子的各种Limit状态,如果Limit对应的状态不是叶子节点则调用ExecProcNode做递归处理。“node->lstate”对应的状态有LIMIT_INITIAL、LIMIT_RESCAN、LIMIT_EMPTY、LIMIT_INWINDOW、LIMIT_SUBPLANEOF、LIMIT_WINDOWEND、LIMIT_WINDOWSTART。其中LIMIT_INITIAL对应处理Limit算子初始化,LIMIT_RESCAN对应重新执行子节点计划,LIMIT_EMPTY对应Limit算子是空集,LIMIT_INWINDOW用于处理窗口函数(在窗口函数内前向和后向移动),LIMIT_SUBPLANEOF用于处理子节点计划(移动到子节点计划尾部),LIMIT_WINDOWEND用于在窗口尾部结束,LIMIT_WINDOWSTART用于在窗口开始处结束。
recompute_limits函数用于在初始化时处理limit/offset表达式。主要执行流程如下。
(1) 处理计划节点中的limitOffset,如果非空则对limitOffset对应的表达式做求值处理,判断limitOffset是否满足约束条件,如果不满足则做报错处理。
(2) 处理计划节点中的limitCount,如果非空则对limitCount对应的表达式做求值处理,判断limitCount是否满足约束条件,如果不满足则做报错处理。
(3) 调用pass_down_bound递归处理子节点。
4. Group算子
Group算子用于处理GROUP BY子句(节点),对满足条件的元组做分组处理,对应的代码源文件是“nodeGroup.cpp”。Group算子对应的子节点返回的元组是按照分组属性排列的结果。算子对应的主要函数如表7-27所示。
主要函数 |
说明 |
|---|---|
ExecInitGroup |
初始化Group状态节点 |
ExecGroup |
迭代获取元组 |
ExecEndGroup |
清理Group状态节点 |
ExecResScanGroup |
重置Group状态节点 |
ExecInitGroup函数初始Group状态节点。主要执行流程如下。
(1) 构造Group状态节点。
(2) 初始化目标表达式和过滤表达式。
(3) 初始化唯一子节点(用于输出元组)。
(4) 获取唯一值过滤函数。
ExecGroup函数输出分组后的元组。Group子节点输出的元组已按照分组属性排序,在迭代输出时只要发现同上一个元组属性不匹配,则生成新的元组(新分组)输出。
5. Agg算子
Agg算子用于执行含有聚集函数的操作,对应的代码源文件是“nodeAgg.cpp”。Agg算子支持3种策略处理:普通聚集(不分组聚集计算)、排序聚集、哈希聚集。排序聚集和哈希聚集计算都包含GROUP BY子句而不分组聚集计算则不包含。普通聚集实际可以看作分组聚集的一种特例(每个元组对应一个分组)。普通聚集与排序聚集使用agg_retrieve_direct函数获取元组,哈希聚集使用agg_retrieve函数获取元组。算子对应的主要函数如表7-28所示。
主要函数 |
说明 |
|---|---|
ExecInitAgg |
初始化Agg状态节点 |
ExecAgg |
迭代获取元组 |
ExecEndAgg |
清理Agg状态节点 |
ExecResScanAgg |
重置Agg状态节点 |
ExecInitAgg函数用于初始化Agg状态节点。主要执行流程如下。
(1) 构建AggState状态节点。
(2) 计算最大分组数(迭代阶段)。
(3) 初始化子计划节点(左子节点)。
(4) 初始化聚合函数。
(5) 初始化罗盘文件。
ExecAgg函数输出聚合元组。从子节点(子计划执行)获取元组,按照指定的属性列聚合,根据不同的聚合调用agg_retrieve或agg_retrieve_direct函数。agg_retrieve函数的执行逻辑是:首先准备数据(从子节点获取数据),然后向哈希表中填充中间计算结果。
6. Unique算子
Unique算子用于对子计划返回的元组去重,对应的代码源文件是“nodeUnique.cpp”。Unique算子的去重逻辑建立在子计划返回的元组已经按照属性排序之上,如果不重复则输出,并放入缓存元组中(用作下一次迭代去重判断),否则继续从子计划中获取元组。
7. hash算子
hash算子用于辅助hash连接算子,对应的代码源文件是“nodeHash.cpp”。hash算子作为辅助算子,仅用来初始化hash状态节点,并提供哈希表创建接口(供hash join算子调用),不迭代输出元组(hash join算子负责输出)。
8. SetOp算子
SetOp算子用于处理Execept与Intersect两种集合操作(INTERSECT、INTERSECT ALL、EXCEPT、EXCECPT ALL),对应的代码源文件是“nodeSetOp.cpp”。Setop算子只有一个左子节点作为输入。SetOp算子在处理集合操作时有2种策略:排序和哈希。哈希模式(SETOP_HASHED)下处理非有序元组集合,而排序模式(SETOP_SORTED)下处理有序元组集合。
9. WindowAgg算子
WindowAgg算子用于处理元组窗口聚合,对应的代码源文件是“nodeWindAgg.cpp”。WindowAgg算子同Agg算子实现的功能类似,实现的模式也类似,主要的差异是窗口聚合处理的元组限定于同一个划分内(窗口),而Agg算子处理的元组是“整个表”(GROUP BY划分)。
10. LockRows算子
LockRows算子提供行级锁,用于SQL语句包含“FOR UPDATE”(排他锁)或“FOR SHARE”(共享锁)时,对元组加锁。对应的源文件是nodeLockRows.cpp。LockRows算子的执行逻辑是从子节点获取元组,然后尝试对元组加锁;如果针对UPDATE操作,需要重新检查子查询(执行EvalPlanQualBegin),并对子查询获得的元组过滤检查,把满足过滤条件的元组返回。
7.3.4 连接算子
连接算子用于处理表关联,openGauss支持12种连接类型(inner join、left join、right join、full join、semi join、anti join等),提供了3种连接算子:hash join、merge join、nested loop join算子;下面分别介绍这3种算子。
1. hash join算子
hash join算子用于hash连接处理,对应的代码源文件是“nodeHashJoin.cpp”。hash连接是做大数据集连接时的常用方式,优化器使用两个表中较小的表(或数据源)利用连接键在内存中建立哈希表,然后扫描较大的表并探测哈希表,找出与哈希表匹配的行。这种方式适用于较小的表完全可以放于内存中的情况,这样总成本就是访问两个表的成本之和。但是在表很大的情况下并不能完全放入内存,执行器会将它分割成若干不同的分区,不能放入内存的部分就把该分区写入磁盘的临时段,此时要有较大的临时段从而尽量提高I/O的性能。算子对应的主要函数如表7-29所示。
主要函数 |
说明 |
ExecInitHashJoin |
初始化hash join状态节点 |
ExecHashJoin |
利用哈希表迭代获取元组 |
ExecEndHashJoin |
清理hash join状态节点 |
ExecResScanHashJoin |
重置hash join状态节点 |
hash join算子对应的状态节点代码如下:
typedef struct HashJoinState {
JoinState js; /* Join节点 */
List* hashclauses; /* hash计算表达式 */
List* hj_OuterHashKeys; /* hash外表键表达式 */
List* hj_InnerHashKeys; /* hash内表键表达式 */
List* hj_HashOperators; /* hash计算运算符 */
HashJoinTable hj_HashTable; /* 哈希表 */
uint32 hj_CurHashValue; /* 当前哈希值 */
int hj_CurBucketNo; /* 当前桶编号 */
int hj_CurSkewBucketNo; /* 倾斜桶编号 */
HashJoinTuple hj_CurTuple; /* 当前处理元组 */
HashJoinTuple hj_PreTuple; /* 前一个处理元组 */
TupleTableSlot* hj_OuterTupleSlot; /* 外元组槽 */
TupleTableSlot* hj_HashTupleSlot; /* 内元组槽 */
TupleTableSlot* hj_NullOuterTupleSlot; /* NULL值外元组槽 */
TupleTableSlot* hj_NullInnerTupleSlot; /* NULL值内元组槽 */
TupleTableSlot* hj_FirstOuterTupleSlot; /* 第一个外元组槽 */
int hj_JoinState; /* 连接状态 */
bool hj_MatchedOuter; /* 匹配外元组 */
bool hj_OuterNotEmpty; /* 外表非空 */
bool hj_streamBothSides; /* 内外表是否都包含stream */
bool hj_rebuildHashtable; /* 重建哈希表标识 */
} HashJoinState;
ExecInitHashJoin函数用于初始化hash join执行节点,把hash join计划节点转换成计划执行节点,整个转换过程采用递归处理的方式。主要执行流程如下。
(1) 构建hash join状态节点(HashJoinState)。
(2) 初始化表达式(目标表达式、join连接表达式、条件过滤表达式等)。
(3) 初始化左右子节点(初始化外表和内表)。
(4) 初始化HashKey及hash函数链表。
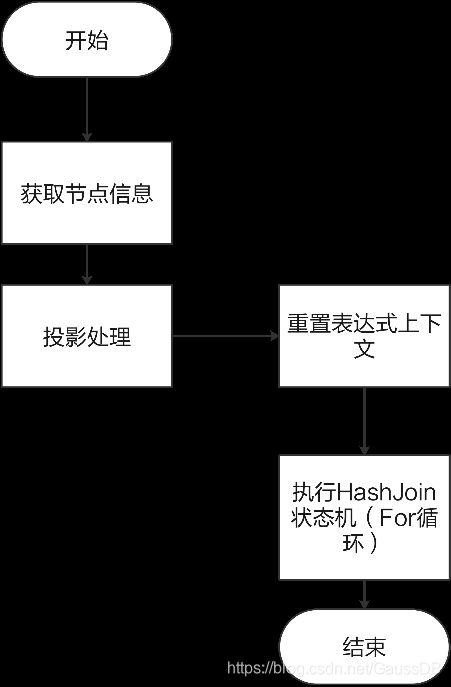
ExecHashJoin函数实现元组迭代输出。主要执行流程是:
(1) 获取节点信息,然后做投影处理,接着重置上下文,最后执行hash join连接状态机(首先对内表做扫描,根据连接键计算哈希值,放入哈希表。
(2) 扫描外表元组,根据连接键计算哈希值,直接查找哈希表进行连接操作,如果匹配成功将结果输出(在内存中匹配),否则做落盘处理。
(3) 对外表和内表落盘的元组做连接。
ExecHashJoin函数操作流程图如图7-10所示。
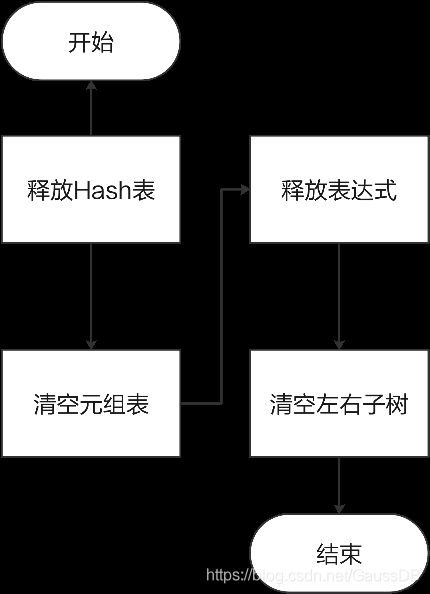
ExecEndHashJoin函数用于资源清理。主要执行流程是:首先释放哈希表,然后清空表达资源,接着释放三个元组表,最后再释放子节点。操作流程如图7-11所示。
ExecReSetHashJoin函数用于重置hash join状态节点。主要执行流程是:首先调用ExecHashTableDestroy释放哈希表,然后调用ExecReSetRecursivePlanTree递归重置左右子树。
ExecReScanHashJoin函数用于重新执行扫描计划。主要执行流程是:首先判断重置状态信息,如果已经递归重置,只需执行重新扫描左右子树计划即可,否则则需要重建哈希表。
2. merge join算子
merge join算子用于支持排序结果集连接,对应的代码源文件是“nodeMergeJoin.cpp”。通常情况下hash连接的效果都比排序合并连接要好,但如果元组已经被排序,在执行排序合并连接时不需要再排序,这时排序合并连接的性能会优于hash连接。merge join算子连接处理的逻辑同经典的归并排序算法相似,需要首先找到匹配位置,然后迭代获取外表与内表匹配位置。
merge join算子相关的核心函数包括:ExecInitMergeJoin、ExecMergeJoin。下面分别介绍这两个主要函数。
ExecInitMergeJoin函数用于初始化merge join状态节点。主要执行流程如下。
(1) 创建merge join状态节点。
(2) 初始化表达式(目标表达式、join连接表达式、条件过滤表达式等)。
(3) 初始化内外节点。
(4) 根据join类型初始化状态节点信息。
ExecMergeJoin函数用于处理归并连接。主要执行流程是:通过2层switch判断当前归并连接的状态(类似与归并排序),计算连接值如发现匹配元组则直接返回,否则继续从外表或内表中获取有序元组,按照连接状态做匹配判断。
3. nested loop join算子
nested loop join算子一般用在连接的表中有索引,并且索引选择性较好的时候,对应的代码源文件是“nodeNestedloop.cpp”。对于被连接的数据子集较小的情况,嵌套循环连接是个较好的选择。Nestedloop算子执行的主要过程是:通过外表(左子节点)驱动内表(内子节点),外表处于外循环,外表返回的每一行都要在内表中检索找到与它匹配的行。因此整个查询返回的结果集不能太大,要把返回子集较小表的作为外表,而且在内表的连接字段上一定要有索引。
感谢大家学习第七章执行器解析中“7.1 执行器整体架构及代码概览”、“7.2 执行流程”及“7.3 执行算子”的精彩内容,下一篇我们开启“7.4 表达式计算”、“7.5 编译执行”及“7.6 向量化引擎”的相关内容的介绍。
敬请期待。