win10+Python3.7.3+OpenCV3.4.1入门学习(十二 图像轮廓)————12.7 利用形状场景算法比较轮廓
Python版本是Python3.7.3,OpenCV版本OpenCV3.4.1,开发环境为PyCharm
文章目录
-
- 12.7 利用形状场景算法比较轮廓
-
- 12.7.1 计算形状场景距离
- 12.7.2 计算Hausdorff距离
12.7 利用形状场景算法比较轮廓
用矩比较形状是一种非常有效的方法,不过现在有了更有效的方法。从OpenCV 3开始,有了专有模块shape,该模块中的形状场景算法能够更高效地比较形状。
12.7.1 计算形状场景距离
OpenCV提供了使用“距离”作为形状比较的度量标准。这是因为形状之间的差异值和距离有相似之处,比如二者都只能是零或者正数,又比如当两个形状一模一样时距离值和差值都等于零。
OpenCV提供了函数cv2.createShapeContextDistanceExtractor(),用于计算形状场景距离。其使用的“形状上下文算法”在计算距离时,在每个点上附加一个“形状上下文”描述符,让每个点都能够捕获剩余点相对于它的分布特征,从而提供全局鉴别特征。
有关该函数的更多理论知识,可以参考学者Belongie等人2002年在IEEE Transactions on Pattern Analysis & Machine Intelligence上发表的论文Shape Matching and Object Recognition Using Shape Contexts
函数cv2.createShapeContextDistanceExtractor()的语法格式为:
retval = cv2.createShapeContextDistanceExtractor(
[, nAngularBins[,
nRadialBins[,
innerRadius[,
outerRadius[,
iterations[,
comparer[,
transformer]]]]]]] )
式中的返回值为retval,返回结果。
该结果可以通过函数cv2.ShapeDistanceExtractor.computeDistance()计算两个不同形状之间的距离。此函数的语法格式为:
retval=cv2.ShapeDistanceExtractor.computeDistance(contour1, contour2)
式中,coutour1和coutour2是不同的轮廓。
函数cv2.createShapeContextDistanceExtractor()的参数都是可选参数:
● nAngularBins:为形状匹配中使用的形状上下文描述符建立的角容器的数量。
● nRadialBins:为形状匹配中使用的形状上下文描述符建立的径向容器的数量。
● innerRadius:形状上下文描述符的内半径。
● outerRadius:形状上下文描述符的外半径。
● iterations:迭代次数。
● comparer:直方图代价提取算子。该函数使用了直方图代价提取仿函数,可以直接采用直方图代价提取仿函数的算子作为参数。
● transformer:形状变换参数。
eg1:使用函数cv2.createShapeContextDistanceExtractor()计算形状场景距离。
代码如下:
import cv2
#-----------原始图像o1边缘--------------------
o1 = cv2.imread('cs.bmp')
cv2.imshow("original1",o1)
gray1 = cv2.cvtColor(o1,cv2.COLOR_BGR2GRAY)
ret, binary1 = cv2.threshold(gray1,127,255,cv2.THRESH_BINARY)
image,contours1, hierarchy = cv2.findContours(binary1,
cv2.RETR_LIST,
cv2.CHAIN_APPROX_SIMPLE)
cnt1 = contours1[0]
#-----------原始图像o2边缘--------------------
o2 = cv2.imread('cs3.bmp')
cv2.imshow("original2",o2)
gray2 = cv2.cvtColor(o2,cv2.COLOR_BGR2GRAY)
ret, binary2 = cv2.threshold(gray2,127,255,cv2.THRESH_BINARY)
image,contours2, hierarchy = cv2.findContours(binary2,
cv2.RETR_LIST,
cv2.CHAIN_APPROX_SIMPLE)
cnt2 = contours2[0]
#-----------原始图像o3边缘--------------------
o3 = cv2.imread('hand.bmp')
cv2.imshow("original3",o3)
gray3 = cv2.cvtColor(o3,cv2.COLOR_BGR2GRAY)
ret, binary3 = cv2.threshold(gray3,127,255,cv2.THRESH_BINARY)
image,contours3, hierarchy = cv2.findContours(binary3,
cv2.RETR_LIST,
cv2.CHAIN_APPROX_SIMPLE)
cnt3 = contours3[0]
#-----------构造距离提取算子--------------------
sd = cv2.createShapeContextDistanceExtractor()
#-----------计算距离--------------------
d1 = sd.computeDistance(cnt1,cnt1)
print("自身距离d1=", d1)
d2 = sd.computeDistance(cnt1,cnt2)
print("旋转缩放后距离d2=", d2)
d3 = sd.computeDistance(cnt1,cnt3)
print("不相似对象距离d3=", d3)
#-----------显示距离--------------------
cv2.waitKey()
cv2.destroyAllWindows()
运行上述程序,会显示如下图所示的图像。其中:
● 左图是图像o1。
● 中间的是图像o2。
● 右图是图像o3。


同时,程序还会显示如下的运行结果:
自身距离d1= 0.0
旋转缩放后距离d2= 0.7913379669189453
不相似对象距离d3= 2.75199031829834
从上述运行结果可以看出;
● 相同图像之间的形状场景距离为零。
● 相似图像之间的形状场景距离较小。
● 不同图像之间的形状场景距离较大。
12.7.2 计算Hausdorff距离
Hausdorff距离的计算方法是:
(1)针对图像A内的每一个点,寻找其距离图像B的最短距离,将这个最短距离作为Hausdorff直接距离D1。
(2)针对图像B内的每一个点,寻找其距离图像A的最短距离,将这个最短距离作为Hausdorff直接距离D2。
(3)将上述D1、D2中的较大者作为Hausdorff距离。
通常情况下,Hausdorff距离H(·)是根据对象A和对象B之间的Hausdorff直接距离h(·)来定义的,用数学公式表式如下:
H(A, B)=max(ℎ(A, B), ℎ(B, A))
其中:
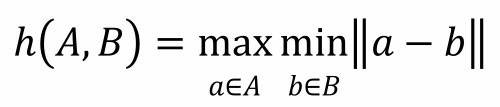
式中,‖·‖表示点a和点b的某种范数,通常是欧氏距离。
OpenCV提供了函数cv2.createHausdorffDistanceExtractor()来计算Hausdorff距离。其语法格式为:
retval = cv2.createHausdorffDistanceExtractor( [, distanceFlag [, rankProp]])
式中的返回值retval为函数返回的结果。
式中的参数如下:
● distanceFlag为距离标记,是可选参数。
● rankProp为一个比例值,范围在0到1之间,也是可选参数。
eg2:使用函数cv2.createHausdorffDistanceExtractor()计算不同图像的Hausdorff距离。
代码如下:
import cv2
#-----------读取原始图像--------------------
o1 = cv2.imread('cs.bmp')
o2 = cv2.imread('cs3.bmp')
o3 = cv2.imread('hand.bmp')
cv2.imshow("original1",o1)
cv2.imshow("original2",o2)
cv2.imshow("original3",o3)
#-----------色彩转换--------------------
gray1 = cv2.cvtColor(o1,cv2.COLOR_BGR2GRAY)
gray2 = cv2.cvtColor(o2,cv2.COLOR_BGR2GRAY)
gray3 = cv2.cvtColor(o3,cv2.COLOR_BGR2GRAY)
#-----------阈值处理--------------------
ret, binary1 = cv2.threshold(gray1,127,255,cv2.THRESH_BINARY)
ret, binary2 = cv2.threshold(gray2,127,255,cv2.THRESH_BINARY)
ret, binary3 = cv2.threshold(gray3,127,255,cv2.THRESH_BINARY)
#-----------提取轮廓--------------------
image,contours1, hierarchy = cv2.findContours(binary1,
cv2.RETR_LIST,
cv2.CHAIN_APPROX_SIMPLE)
image,contours2, hierarchy = cv2.findContours(binary2,
cv2.RETR_LIST,
cv2.CHAIN_APPROX_SIMPLE)
image,contours3, hierarchy = cv2.findContours(binary3,
cv2.RETR_LIST,
cv2.CHAIN_APPROX_SIMPLE)
cnt1 = contours1[0]
cnt2 = contours2[0]
cnt3 = contours3[0]
#-----------构造距离提取算子--------------------
hd = cv2.createHausdorffDistanceExtractor()
#-----------计算距离--------------------
d1 = hd.computeDistance(cnt1,cnt1)
print("自身Hausdorff距离d1=", d1)
d2 = hd.computeDistance(cnt1,cnt2)
print("旋转缩放后Hausdorff距离d2=", d2)
d3 = hd.computeDistance(cnt1,cnt3)
print("不相似对象Hausdorff距离d3=", d3)
#-----------显示距离--------------------
cv2.waitKey()
cv2.destroyAllWindows()
运行上述程序,会显示如图12-32所示的图像。其中:
● 左图是图像o1。
● 中间的是图像o2。
● 右图是图像o3。
同时,程序还会显示如下的运行结果:
自身Hausdorff距离d1= 0.0
旋转缩放后Hausdorff距离d2= 18.357559204101562
不相似对象Hausdorff距离d3= 57.27128601074219
从上述运行结果可以看出:
● 相同图像之间的Hausdorff距离为零。
● 相似图像之间的Hausdorff距离较小。
● 不同图像之间的Hausdorff距离较大。