【多传感器融合理论】01自动驾驶中常用传感器硬件介绍
目录
摄像头介绍
优势:
工作原理:
应用:
性能要求:
优缺点对比分析
摄像头关键参数:
激光雷达介绍:
工作原理:
激光雷达特性:
激光雷达的分类:
应用:
毫米波雷达介绍
概述
工作原理
基本结构
应用
性能参数
惯性传感器
工作原理
IMU特性
影响因素
应用
GNSS与RTK介绍
概述
应用
超声波雷达
概述
工作原理
超声波雷达类型
超声波雷达的优劣势
应用:
摄像头介绍
优势:
可以识别车辆周边的环境信息和纹理信息,能够“看到”目标的类型、信号灯的颜色,类似于人类的眼睛。
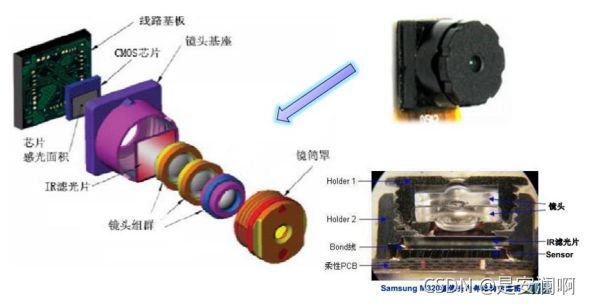
工作原理:
光学组件(光信号)--> 图像传感器(电信号)--> 数字图像信号 --> 信号算法处理。
摄像头获取到数字信号后,通过串行器进行编码,通过LVDS(FPD和GMSL)或其他高效链路,传输到计算平台,解串器进行解码,计算单元进行图像分析。
光学组件:(镜头组件,lens)由镜片、滤光片、保护膜组成。
CMOS图像传感器(感光元件,CIS):是模拟电路和数字电路的集成,是摄像头最基础、最重要的模块,由四部分构成:微透镜,彩色滤光片(CF),光电二极管(PD),光电转换器件,像素设计。
应用:
根据安装位置,分为前视、侧视、后视、内置、环视摄像头。
前视摄像头:障碍物、车道线、路沿线、交通信号灯、交通标识牌、可行使区域;
侧视摄像头: 障碍物、距离等盲区监测(BSD);
后视摄像头:障碍物、距离;
环视摄像头:车位监测,可行使区域监测,低速感知,提供车辆四周360°的画面;
内置摄像头:疲劳,不规范驾驶等危险行为预警;
性能要求:
耐高温:-40~85°,能适应剧烈温度变化;
抗震性;防水性;使用寿命:至少10年;高动态低噪点:高动态性;光线较暗下抑制噪点的产生;
优缺点对比分析
优势:
相比于毫米波雷达:能够对目标类别进行准确识别,对车道线、红绿灯、交通标志准确识别;对横向移动目标有很强的探测能力。
相比于激光雷达:成本低,精准交通标识和信号灯识别;
劣势:
摄像头受天气、光照影响比较大,极端恶劣天气下视觉传感器就会失效;
视觉测距、测速性能远比不上激光雷达和毫米波雷达;
摄像头关键参数:
焦距:指平行光从透镜中心到光聚的焦点的距离,如4mm,6mm,12mm;
有效的探测距离:如近距,中距,远距等对应不同探测距离需求;
视场角:水平视场角(HFOV)和垂直视场角(VFOV);
分辨率大小:200W(1920x1080),500W(2560x2048),800W(3200x2400);
最低照度:CMOS对环境光线的敏感程度;
信噪比:输出的信号电压和噪声电压的比值;
动态范围:正常显示细节的最亮和最暗物体的亮度值所包含的那个区间;
激光雷达介绍:
概述:
激光雷达(Lidar),全称Laser Detecting and Ranging,即激光探测和测距,是一种用于精确获 得三维位置信息的传感器,可以确定目标的位置、 大小、外部轮廓等。与毫米波雷达工作原理相似, 激光雷达通过发射和接收激光束,获取空间的位置 点信息(即点云),并根据这些信息进行三维建模。
除了获取位置信息外,激光信号的反射率还可以区分目标物质的不同材质,激光雷达的线束越多 ,其测量精度越高。由于激光的频率高,波长短, 可以获得极高的角度、距离和速度分辨率,这就意味着可以利用多普勒成像技术,构建出清晰的3D图像。
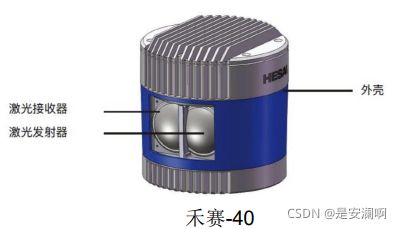
工作原理:
激光雷达一般包括发射系统、接收系统、信息处理三大部分组成,部分激光雷达还包括扫描系统。
发射系统:包括激励源、激光器(也叫激光二极管)、光速 控制器(包括 透镜、反射器件、衍生器件,具体表现为准直 镜、分束器、扩散片)等;
接收系统:包括光电探测器、接收模块(包括透镜、分束器 、窄带滤光片)等硬件;
信息处理:包括放大器、数模转换器以及软件算法等
扫描系统:由电机、扫描镜、MEMS微型谐振镜、相控阵等 组成(Flash中不包含扫描系统);
激光雷达的测距有两种,一种是基于时间的测量方法,也叫飞行时间法(TOF):脉冲法和三角法;另一种是 不基于时间的测距法:相位式测量方法。
激光雷达特性:
视场角:包括水平FOV和垂直FOV;
分辨率:包括水平分辨率和垂直分辨率;
测距范围:最远的探测距离;
刷新频率:激光返回一圈的距离;
扫描频率:1S内进行多少次扫描;
激光波长:常见为905nm和1550nm;
最大辐射功率:判断是否需要添加防护;
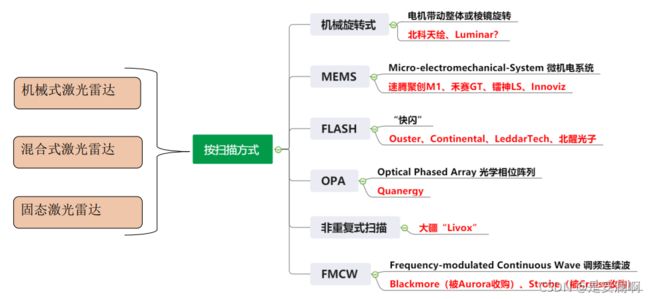
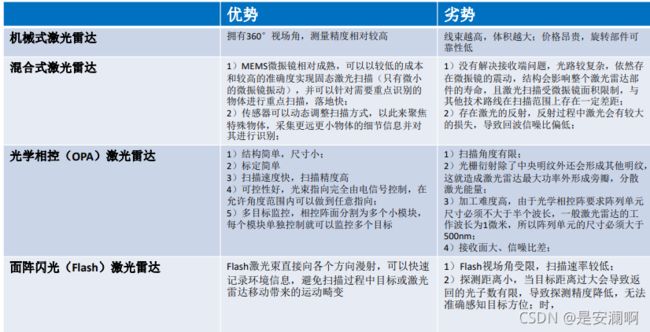
激光雷达的分类:
应用:
环境感知:Lidar通过扫描得到障碍物反射回的点云后采用分类聚类或者深度学习的 方法进行障碍物检测,还有使用Lidar进行车道线检测或者路面探测的。
标定:给出不同的传感器数据集,找出两个数据集的空间变换关系,使得两个数 据集统一到同一坐标系的过程。
里程器与定位:根据标定得到的相对姿态变换关系后,利用传感器数据来估计载体车辆姿 态随时间的变化改变关系。
毫米波雷达介绍
概述
毫米波是一种波长介 于30~300GHz频域(波长 为1~10mm)的电磁波, 其波长短、频段宽,比较 容易实现窄波束,具有 分辨率高,不易受干扰 等特点。毫米波雷达是 采用毫米波对目标进行 探测,获取目标的相对 距离、相对速度、方位 的高精度传感器。
毫米波优点:
- 毫米波导引头具有体积小、质 量轻、空间分辨率高的特点;
- 毫米波导引头穿透雾、烟、灰 尘的能力强,传输距离远,具 有全天候全天时的特点;
- 毫米波性能稳定,不受目标物 体形状、颜色的干扰,能够很 好的弥补如红外、激光、超声 波、摄像头等其他传感器在车 载应用中不具备的使用场景。
工作原理
笼统来讲:车载毫米波 雷达通过发射天线向外发射 毫米波,通过接收天线接收 目标物的反射信号,经后方 信号处理后快速准确地获取 汽车车身周围的物理环境信 息(如汽车与反射物体之间 的相对距离、相对速度、角 度、运动方向等)。
细分来讲:细分来讲,毫米波雷达的工作原理又分为测距原理、测速原理及测角原理。以下主要从这三个方面展开讨论。
基本结构
根据辐射电磁波方式不同,毫米波 雷达主要有脉冲体制以及连续波体制两 种。不管哪种工作方式的毫米波雷达, 其硬件部分大体相同,只有小部分电路 模块、电路参数与信号处理算法有所区 别,主要部分包括MMIC芯片和天线PCB 板。MMIC全称前端单片微波集成电路, 包括多种功能,如低噪声放大器(LNA ),功率放大器、混频器、收发系统等 功能;雷达天线高频PCB板是将高频PCB 板集成在普通的PCB基板上实现天线的 功能,需要在较小的集成空间中保持天 线足够的信号强度。
应用
24GHz毫米波雷达: 24GHz毫米波雷达是指频段在24.0GHz到24.25GHz的雷达。其属于窄带(NB),带宽为250MHz,常用 于工业、科学和医学方面。另外24GHz频带还包括一个带宽为5GHz的超带宽(UWB)。
77GHz毫米波雷达: 77GHz毫米波雷达指的是频段在76-81GHz的车载雷达。其中76-77GHz频段可用于远程车载雷达,这个 频段的频率高,带宽也高,可以达到800MHz。
4D毫米波雷达: 目前的车载毫米波雷达虽然能够很好的探测目标的相对距离,但对目标的高度无法探测。 这是因为目前的车载毫米波雷达只在二维方向上排布,再加上多普勒效应,所以只会输出目 标的二维水平坐标和速度信息,即X,Y, V。也被称为3D雷达。 目前有一些厂商在水平和垂直方向上均布置了天线,能够额外实现对物体高度的探测, 输出量为X,Y,Z坐标和速度矢量。也就是所谓的4D雷达。
24GHz与77GHz毫米波雷达性能对比:
a) 严格意义上讲,24GHz毫米波雷达其波长大于10cm,属于厘米波雷达;
b) 相比于24GHz,77GHz能同时满足高传输功率和宽工作带宽,所以可以用来进行长距离探测和高距 离分辨率;
c) 相比于24GHz,77GHz在物体分辨率、测速、测距精度上具有显著优势;
d) 相比于24GHz,77GHz雷达体积更小,其波长不足24GHz的三分之一,所以收发天线面积大幅减小, 整个雷达尺寸有效下降。
毫米波雷达优劣势:
优点:
- 纵向目标探测距离与速度探测能 力强;
- 可实现远距离感知与探测;
- 对于静态和动态目标均能做出高 精度测量;
- 相比于摄像头和激光雷达,毫米 波雷达穿透能力强,受外界干扰比 较小。
缺点
- 无法成像,无法进行图像颜色的识别;
- 对横向目标敏感度低,如对横穿 车辆检测效果不佳;
- 行人反射波较弱,对行人分辨率 不高,探测距离近;
- 对高处物体以及小物体检测效果 不佳等
性能参数
距离:最大探测距离,距 离分辨率,距离精度;
速度:最大探测速度,速 度分辨率,测速精度;
角度:探测视角范围FOV ,角度分辨率(一般指水 平分辨率),测角精度;
雨雾尘天气对LiDAR和Radar的影响
雾气的粒子直径为1~100μm 微米,集中于10~15μm; 灰尘的颗粒直径小于500μm,PM10小于10μm,PM2.5小于2.5μm; 雨滴的直径0.5~5mm 毫米;
波长比雨雾的粒子直径足够大时,就能够穿透雨雾而不会发生能量衰减,一般 30mm以上的微波就可以做到;
毫米波(24Ghz、77GHz)对应波长为12.5mm、3.9mm,能够穿透雾气、灰尘,但不能穿过较大雨滴(大雨);
激光雷达的波长集中于0.85~1.55μm之间,雾气、灰尘、雨滴都有影响,雾气和灰 尘的粒子更多,影响更大;
惯性传感器
惯性测量单元(Inertial Measurement Unit,IMU)俗称惯性传感器,主要用来检测 和测量加速度与旋转运动的传感器。主要是采用惯性定律实现的。
车载惯性传感器(Micro-Electro-Mechanical-System,即MEMS)是汽车传感器 的主要部分,其主要由3个轴加速计和3个角速度计(陀螺仪)组成,加速度计检测物体在 载体坐标系独立三轴的加速度信号,陀螺仪检测载体相对导航系统坐标系的角速度信号。加 速度计和陀螺仪安装在相互垂直的测量轴上,通过算法对信号进行处理后,便可计算出物体 的姿态。
IMU提供的是一个相对的定位信息,其作用是测量相对于起点物体所运动的路线,所以 IMU不能提供所在的具体位置信息,所以经常和GPS一起使用,当在某些GPS信号微弱时 ,IMU就可以帮助汽车获得绝对位置的信息.
工作原理
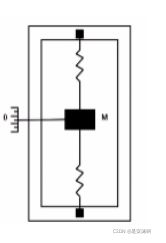
加速度计
IMU中的加速度计主要是靠MEMS中可移动部分的惯 性。如下图: IMU中间有块质量很大的电容板,它是一种悬臂构 造,当速度变化或者加速度达到足够大时,其所受到 的惯性力超过固定或者支撑它的力时,就会移动,与 上下电容板之间的距离就会变化,上下电容也因此变 化。电容的变化跟加速度成正比,根据不同的测量范 围,中间电容板悬臂构造的强度或弹性系数可以设计 的不同。另外如果要测量不同方向的加速度,这个 MEMS的结构也会有很大不同。
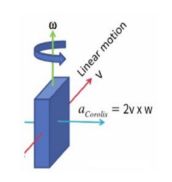
角速度计
IMU的角速度计其主要原理是利用角动量守恒原 理以及Corolis force(科里奥效应)测量运动物体 的角速率。与加速度计的工作原理相似,角速度计上层活动金属与下层金属形成电容,当角速度计转 动时,它与下面电容板之间的距离会发生变化,上 下电容也会因此改变。即角速度计的转轴指向不随 其支架的旋转而变化。电容的变化与角速度成正比 ,由此测量得到当前的角速度。 如左图来描述角速度计的数学模型。
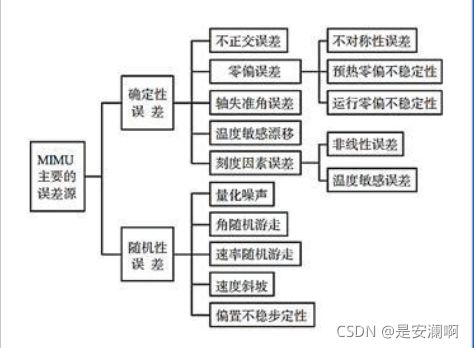
IMU特性
IMU测量的数 据通常会有一定的误差。其误差可以分为:
影响因素
加速度计影响因素 :角速度计的精确性可以直接影响姿态解算 的优劣程度,即IMU能否正确感知到物体 的姿态就是依靠角速度计的精确性。
角速度计影响因素 角速度计的精确性可以直接影响姿态解算 的优劣程度,即IMU能否正确感知到物体 的姿态就是依靠角速度计的精确性。
温度影响因素 IMU在温度发生变化时,其精度会产生较 大的差异,所以一般需要在恒温台中进行 时间,记录不同温度下的数据。
产品化影响因素 产品化后,也会有一些因素影响其性能。 如:噪声、偏移等因素
除了精度外,IMU还有两个比较关键的特性,第一是更 新频率高,工作频率可以达到100Hz以上,第二是短时间内 的推算精度高,不会有太大的误差。
应用
高 精度定位有两层含义:
1)自车与周围环境之间的 相位位置,即相对定位;
2)自车的精确经纬度, 即绝对定位。
GPS可以为车辆提供精度为米级的绝对定位, 差分GPS或者RTK GPS可以为车辆提供厘米级的绝 对定位,但并非所有路段所有时间都能够得到良 好的GPS信号。所以一般需要RTK GPS的输出与IMU 、车身传感器(轮速计、方向盘转角传感器等) 进行融合。
作用:
1)IMU可以验证RTK GPS结果的自洽性,并对无法自洽的绝对定位数据进行滤波和修正;
2)IMU可以在RTK GPS信号消失之后,仍然提供持续 若干秒的亚米级定位精度,为自动驾驶汽车争取宝贵的异常处理的时间。
GNSS与RTK介绍
概述
GNSS全称Global Navigation Satellite System, 是利用一组卫星的伪距、星历、卫星发射时间等 观测量,同时还必须知道用户钟差。全球导航卫 星系统是能在地球表面或近地空间的任何地点为 用户提供全天候的3维坐标和速度以及时间信息 的空基无线电导航定位系统。只需4颗卫星,就 能获得目标经纬度和高度。
GPS全称Global Positioning System,是一种以人造地球卫星 为基础的高精度无线电导航的定 位系统,它在全球任何地方以及 近地空间都能够提供准确的地理 位置、车行速度及精确的时间信 息。
GNSS它是泛指所有的卫星导航系统,包括全球的、区域的和增强的, 如美国的GPS、俄罗斯的Glonass、欧洲的Galileo、中国的北斗卫星导航系 统,以及相关的增强系统,如美国的WAAS(广域增强系统)、欧洲的EGNOS (欧洲静地导航重叠系统)和日本的MSAS(多功能运输卫星增强系统)等 ,还涵盖在建和以后要建设的其他卫星导航系统。国际GNSS系统是个多系 统、多层面、多模式的复杂组合系统。
RTK(Real - time kinematic,实时动态)载波相位差分技术,是实时处理两个测量站载波相位观测量 的差分方法,将基准站采集的载波相位发给用户接收机,进行求差解算坐标。厘米级定位精度,是GPS应用的 重大里程碑。其原理是将位于基准站上的GPS接收机观测的卫星数据,通过数据通信链(无线电台)实时发送 出去,而位于附近的移动站GPS接收机在对卫星观测的同时,也接收来自基准站的电台信号,通过对所收到的 信号进行实时处理,给出移动站的三维坐标,并估计其精度。利用RTK测量时,至少配备两台GPS接收机。
应用
GNSS:国内用的多的是GPS+北斗+GLONASS三套卫星导航系统;
◆ 在自动驾驶领域,GNSS高精度定位涉及到五个必要的时空因素:GNSS卫星、高精度地图、全疆域通讯网络覆盖、GNSS基站、移动端GNSS接收机;
◆ GNSS与其他传感器的结合 :在自动驾驶领域,多传感器共同工作的环境,也使该领域对GNSS设备的精确 性、抗干扰性提出了更高的要求。未来,每辆自动驾驶汽车都将配备有多种传感器,包括激光雷达、毫 米波雷达、摄像头、惯性测量单元和GNSS系统;
◆ GNSS定位可以为自动驾驶提供全局定位信息的来源。GNSS是通过使用三角定位法,通过3颗以上的卫星, 可以准确地定位地球表面的任一位置。但由于GPS是有很大的误差,通过使用RTK技术,GNSS可以提供精 确到厘米级别的定位精度;
◆ GNSS+IMU方案是一种最常用的组合惯导系统的方案
超声波雷达
概述
超声波雷达是一款极为常见的传感器, 在汽车驻车或者倒车时,经常会听到嘀嘀嘀 的声音,这些声音就是根据超声波雷达对周 围障碍物的探测距离的反馈信息,以声音的 形式传递给司机,所以超声波雷达也叫倒车 雷达。 车载超声波雷达一般安装在汽车保险杠上 方,隐藏在保险杆的某个位置。

工作原理
超声波雷达的工作原理是通过超声波发射装 置向外某一个方向发射出超声波信号,在发射超 声波时刻的同时开始计时,超声波通过空气进行 传播,途中遇到障碍物就会立即反射传播回来, 超声波接收器在收到反射波的时刻立即停止计时 。在空气中,超声波的传播速度为340m/s,计时 器通过记录时间t,就可以测算出从发射点到障 碍物之间的距离长度(s),即s=340*t / 2。 目前,超声波雷达探头的工作频率有40kHz ,48kHz和58kHz三种。一般来说,频率越高, 灵敏度越高,但水平和垂直方向的探测角度就越 小,所以一般采用40kHz的探头。
超声波雷达类型
常见的超声波雷达有两种:
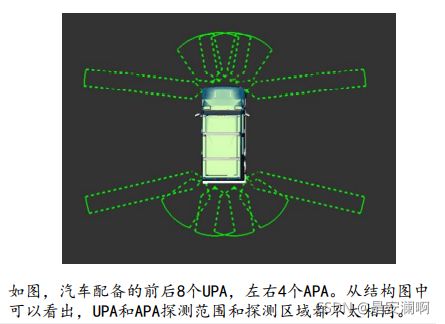
◆ 一种是安装在汽车前后保险杠上的,用于测量汽车前后障碍物的倒车雷达,即所谓的UPA,探测 距离一般在15~250cm;
◆ 一种是安装在汽车侧面的,用于测量侧方障碍物 距离的超声波雷达,即所谓APA,探测距离一般 在30~500cm,相比于UPA,APA的探测范围更远, 但成本更高,功率更大。

超声波雷达的优劣势
优点:
- 因其固有的特性,在传播过程中,能量消耗比较慢;
- 在介质中传播的距离比较远,穿透性强,即使在雨雾 灰尘或者少量泥沙遮挡的条件下,都能够有很好的测 距性能;
- 且测距方法简单,成本较低;
缺点:
- 超声波雷达探测的距离与其传播速度、传播时间相关 (距离=速度*时间/2);
- 在车辆高速运行的状态下,其测量距离也有一定的局限性
- 超声波雷达散射角较大,方向性差,无法精准的描述 障碍物的位置
应用:
超声波雷达在智能驾驶领域除了障碍物探测外,还有其他的功能,如泊车库位检测,高速横向辅助。
点个赞吧!
The end!