十五.激光和惯导LIO-SLAM框架学习之惯导与雷达外参标定(1)
即确认惯导与雷达的旋转变换矩阵
平移向量影响不是很大,直接从结构图纸中得到即可,即是惯导原点到雷达原点的向量。旋转矩阵对建图影响比较大,首先我们得确认理论的旋转矩阵,然后再进行标定。
确认理论的旋转矩阵的方法:
将imageProjection.cpp里这个回调函数中的注释打开。
void imuHandler(const sensor_msgs::Imu::ConstPtr& imuMsg)
{
sensor_msgs::Imu thisImu = imuConverter(*imuMsg); // 对imu做一个坐标转换
// 加一个线程锁,把imu数据保存进队列
std::lock_guard lock1(imuLock);
imuQueue.push_back(thisImu);
// debug IMU data
// cout << std::setprecision(6);
// cout << "IMU acc: " << endl;
// cout << "x: " << thisImu.linear_acceleration.x <<
// ", y: " << thisImu.linear_acceleration.y <<
// ", z: " << thisImu.linear_acceleration.z << endl;
// cout << "IMU gyro: " << endl;
// cout << "x: " << thisImu.angular_velocity.x <<
// ", y: " << thisImu.angular_velocity.y <<
// ", z: " << thisImu.angular_velocity.z << endl;
// double imuRoll, imuPitch, imuYaw;
// tf::Quaternion orientation;
// tf::quaternionMsgToTF(thisImu.orientation, orientation);
// tf::Matrix3x3(orientation).getRPY(imuRoll, imuPitch, imuYaw);
// cout << "IMU roll pitch yaw: " << endl;
// cout << "roll: " << imuRoll << ", pitch: " << imuPitch << ", yaw: " << imuYaw << endl << endl;
}
参考这个视频https://youtu.be/BOUK8LYQhHs
确认惯导的输出是否正常,如果Z轴的加速度是负数,则Z轴反过来了,查看
LIO-SAM中config文件夹中的配置yaml文件:
这两个矩阵需要做调整,根据与视频的现象进行的对比,这里发现单位阵是可以达到Z轴加速度是正数9.8的(重力加速度)。
这里就已经确定了Z轴,我们暂时无法确定X轴和Y轴的朝向,可以参考后面标定出来的旋转矩阵。
其中extrinsicRot表示imu->lidar的坐标变换, 用于旋转imu坐标系下的加速度和角速度到lidar坐标系下, extrinsicRPY则用于旋转imu坐标系下的欧拉角到lidar坐标下, 由于lio-sam作者使用的imu的欧拉角旋转方向与lidar坐标系不一致(即是按照什么旋转顺序旋转), 因此使用了两个旋转不同, 但是大部分的设备两个旋转应该是设置为相同的,我们这里也是设置为相同即可。
下面进行标定:
第一种标定软件(不可行):
下载标定工具
mkdir -p catkin_ws/src
cd catkin_ws/src
git clone https://github.com/chennuo0125-HIT/lidar_imu_calib.git
cd ..
catkin_make -DCATKIN_WHITELIST_PACKAGES="ndt_omp;lidar_imu_calib"第二种标定软件(目前可行):
https://github.com/stevengj/nlopt.git
github下载nlopt 并cmake编译
https://github.com/ethz-asl/lidar_align.git
github下载源码进行ROS编译
编译时出现Could not find NLOPTConfig.cmake
解决办法:找到这个文件并将其放入到工程目录下,并在CMakeLists.txt里加上这样一句话:
list(APPEND CMAKE_FIND_ROOT_PATH ${PROJECT_SOURCE_DIR})
由于这个标定软件没有IMU的数据接口,所以改写http://loader.cc
改写如下:
#include
#include
#include
#include
#include "lidar_align/loader.h"
#include "lidar_align/transform.h"
namespace lidar_align {
Loader::Loader(const Config& config) : config_(config) {}
Loader::Config Loader::getConfig(ros::NodeHandle* nh) {
Loader::Config config;
nh->param("use_n_scans", config.use_n_scans, config.use_n_scans);
return config;
}
void Loader::parsePointcloudMsg(const sensor_msgs::PointCloud2 msg,
LoaderPointcloud* pointcloud) {
bool has_timing = false;
bool has_intensity = false;
for (const sensor_msgs::PointField& field : msg.fields) {
if (field.name == "time_offset_us") {
has_timing = true;
} else if (field.name == "intensity") {
has_intensity = true;
}
}
if (has_timing) {
pcl::fromROSMsg(msg, *pointcloud);
return;
} else if (has_intensity) {
Pointcloud raw_pointcloud;
pcl::fromROSMsg(msg, raw_pointcloud);
for (const Point& raw_point : raw_pointcloud) {
PointAllFields point;
point.x = raw_point.x;
point.y = raw_point.y;
point.z = raw_point.z;
point.intensity = raw_point.intensity;
if (!std::isfinite(point.x) || !std::isfinite(point.y) ||
!std::isfinite(point.z) || !std::isfinite(point.intensity)) {
continue;
}
pointcloud->push_back(point);
}
pointcloud->header = raw_pointcloud.header;
} else {
pcl::PointCloud raw_pointcloud;
pcl::fromROSMsg(msg, raw_pointcloud);
for (const pcl::PointXYZ& raw_point : raw_pointcloud) {
PointAllFields point;
point.x = raw_point.x;
point.y = raw_point.y;
point.z = raw_point.z;
if (!std::isfinite(point.x) || !std::isfinite(point.y) ||
!std::isfinite(point.z)) {
continue;
}
pointcloud->push_back(point);
}
pointcloud->header = raw_pointcloud.header;
}
}
bool Loader::loadPointcloudFromROSBag(const std::string& bag_path,
const Scan::Config& scan_config,
Lidar* lidar) {
rosbag::Bag bag;
try {
bag.open(bag_path, rosbag::bagmode::Read);
} catch (rosbag::BagException e) {
ROS_ERROR_STREAM("LOADING BAG FAILED: " << e.what());
return false;
}
std::vector types;
types.push_back(std::string("sensor_msgs/PointCloud2"));
rosbag::View view(bag, rosbag::TypeQuery(types));
size_t scan_num = 0;
for (const rosbag::MessageInstance& m : view) {
std::cout << " Loading scan: \e[1m" << scan_num++ << "\e[0m from ros bag"
<< '\r' << std::flush;
LoaderPointcloud pointcloud;
parsePointcloudMsg(*(m.instantiate()),
&pointcloud);
lidar->addPointcloud(pointcloud, scan_config);
if (lidar->getNumberOfScans() >= config_.use_n_scans) {
break;
}
}
if (lidar->getTotalPoints() == 0) {
ROS_ERROR_STREAM(
"No points were loaded, verify that the bag contains populated "
"messages of type sensor_msgs/PointCloud2");
return false;
}
return true;
}
bool Loader::loadTformFromROSBag(const std::string& bag_path, Odom* odom) {
rosbag::Bag bag;
try {
bag.open(bag_path, rosbag::bagmode::Read);
} catch (rosbag::BagException e) {
ROS_ERROR_STREAM("LOADING BAG FAILED: " << e.what());
return false;
}
std::vector types;
types.push_back(std::string("sensor_msgs/Imu"));
rosbag::View view(bag, rosbag::TypeQuery(types));
size_t imu_num = 0;
double shiftX=0,shiftY=0,shiftZ=0,velX=0,velY=0,velZ=0;
ros::Time time;
double timeDiff,lastShiftX,lastShiftY,lastShiftZ;
for (const rosbag::MessageInstance& m : view){
std::cout <<"Loading imu: \e[1m"<< imu_num++<<"\e[0m from ros bag"<<'\r'<< std::flush;
sensor_msgs::Imu imu=*(m.instantiate());
Timestamp stamp = imu.header.stamp.sec * 1000000ll +imu.header.stamp.nsec / 1000ll;
if(imu_num==1){
time=imu.header.stamp;
Transform T(Transform::Translation(0,0,0),Transform::Rotation(1,0,0,0));
odom->addTransformData(stamp, T);
}
else{
timeDiff=(imu.header.stamp-time).toSec();
time=imu.header.stamp;
velX=velX+imu.linear_acceleration.x*timeDiff;
velY=velX+imu.linear_acceleration.y*timeDiff;
velZ=velZ+(imu.linear_acceleration.z-9.801)*timeDiff;
lastShiftX=shiftX;
lastShiftY=shiftY;
lastShiftZ=shiftZ;
shiftX=lastShiftX+velX*timeDiff+imu.linear_acceleration.x*timeDiff*timeDiff/2;
shiftY=lastShiftY+velY*timeDiff+imu.linear_acceleration.y*timeDiff*timeDiff/2;
shiftZ=lastShiftZ+velZ*timeDiff+(imu.linear_acceleration.z-9.801)*timeDiff*timeDiff/2;
Transform T(Transform::Translation(shiftX,shiftY,shiftZ),
Transform::Rotation(imu.orientation.w,
imu.orientation.x,
imu.orientation.y,
imu.orientation.z));
odom->addTransformData(stamp, T);
}
}
/*
types.push_back(std::string("geometry_msgs/TransformStamped"));
rosbag::View view(bag, rosbag::TypeQuery(types));
size_t tform_num = 0;
for (const rosbag::MessageInstance& m : view) {
std::cout << " Loading transform: \e[1m" << tform_num++
<< "\e[0m from ros bag" << '\r' << std::flush;
geometry_msgs::TransformStamped transform_msg =
*(m.instantiate());
Timestamp stamp = transform_msg.header.stamp.sec * 1000000ll +
transform_msg.header.stamp.nsec / 1000ll;
Transform T(Transform::Translation(transform_msg.transform.translation.x,
transform_msg.transform.translation.y,
transform_msg.transform.translation.z),
Transform::Rotation(transform_msg.transform.rotation.w,
transform_msg.transform.rotation.x,
transform_msg.transform.rotation.y,
transform_msg.transform.rotation.z));
odom->addTransformData(stamp, T);
}
*/
if (odom->empty()) {
ROS_ERROR_STREAM("No odom messages found!");
return false;
}
return true;
}
bool Loader::loadTformFromMaplabCSV(const std::string& csv_path, Odom* odom) {
std::ifstream file(csv_path, std::ifstream::in);
size_t tform_num = 0;
while (file.peek() != EOF) {
std::cout << " Loading transform: \e[1m" << tform_num++
<< "\e[0m from csv file" << '\r' << std::flush;
Timestamp stamp;
Transform T;
if (getNextCSVTransform(file, &stamp, &T)) {
odom->addTransformData(stamp, T);
}
}
return true;
}
// lots of potential failure cases not checked
bool Loader::getNextCSVTransform(std::istream& str, Timestamp* stamp,
Transform* T) {
std::string line;
std::getline(str, line);
// ignore comment lines
if (line[0] == '#') {
return false;
}
std::stringstream line_stream(line);
std::string cell;
std::vector data;
while (std::getline(line_stream, cell, ',')) {
data.push_back(cell);
}
if (data.size() < 9) {
return false;
}
constexpr size_t TIME = 0;
constexpr size_t X = 2;
constexpr size_t Y = 3;
constexpr size_t Z = 4;
constexpr size_t RW = 5;
constexpr size_t RX = 6;
constexpr size_t RY = 7;
constexpr size_t RZ = 8;
*stamp = std::stoll(data[TIME]) / 1000ll;
*T = Transform(Transform::Translation(std::stod(data[X]), std::stod(data[Y]),
std::stod(data[Z])),
Transform::Rotation(std::stod(data[RW]), std::stod(data[RX]),
std::stod(data[RY]), std::stod(data[RZ])));
return true;
}
} // namespace lidar_align
录制话题数据,旋转三个轴,XY轴不要大幅度旋转
rosbag record -o 20211117.bag out /velodyne_points /imu_raw
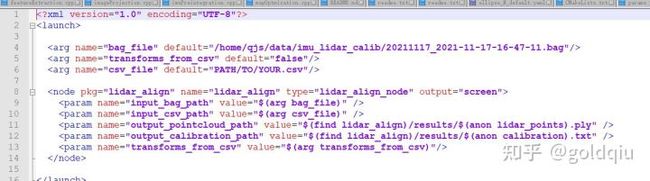
修改标定软件包launch文件中的数据包路径,然后运行launch文件,等待漫长迭代优化时间。
最后输出数据:

这里发现标定矩阵类似于单位阵,说明单位阵是理论外参,而标定后的矩阵是考虑了小角度误差后的外参。
把旋转矩阵复制到LIO-SAM中config文件夹中的配置yaml文件中,更改这两个矩阵。
最后室外测试效果:
