【ROS学习5(Topic)】话题消息(message)的自定义与使用
目录
-
-
- 话题消息的自定义与使用:
-
- 如何定义话题消息:
-
- ➢定义msg文件:(Person.msg)
- ➢ 在package.xml中添加功能包依赖:
- ➢在CMakeLists.txt添加编译选项:
- 回到工作空间根目录,catkin_make编译:
- 创建发布者:
- 创建一个订阅者:
- 编译运行:
-
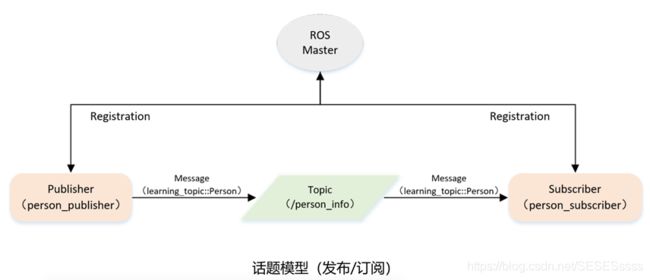
话题消息的自定义与使用:
在上几次的学习当中,无论是给小海龟发送速度指令的Twist消息,还是去订阅小海龟的位姿Pose消息,都是ROS里默认定义的,假如这些消息仍无法满足我们的需求,我们就需要自定义一个消息类型。
我们以创建一个个人信息的消息类型为例:
如何定义话题消息:
➢定义msg文件:(Person.msg)
cd learning_topic
mkdir msg
#用touch命令创建一个空文件
touch Person.msg
#放置在该文件夹下
包含以下内容:
string name
uint8 sex
uint8 age#类似于宏定义
uint8 unknown = 0
uint8 male = 1
uint8 female = 2
#msg文件里的语法不属于任何一种语言,在编译时会根据不同的语言需求自动扩展成该语言下的表示语法。
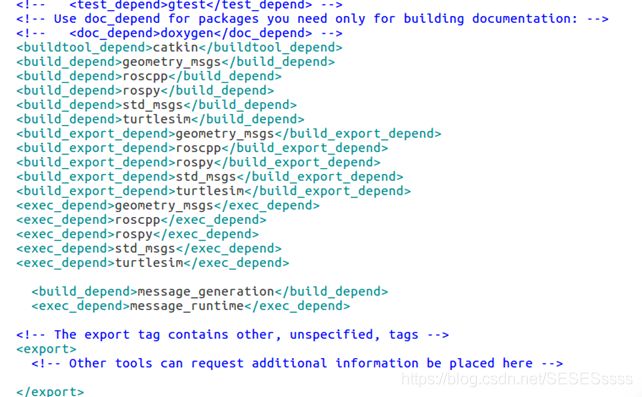
➢ 在package.xml中添加功能包依赖:
<build_depend>message_generation</build_depend>
#执行依赖
<exec_depend>message_runtime</exec_depend>
#运行依赖(动态依赖)
➢在CMakeLists.txt添加编译选项:
#添加依赖包
find_package( ...... message_generation)
#将Person.msg定义为消息接口
add_message_files(FILES Person.msg)
#编译消息接口依赖包
generate_messages(DEPENDENCIES std_msgs)
#创建运行依赖
•catkin_package(...... message_runtime)
在CMakeLists里根据注释找到对应的位置并添加即可。
注意,Ubuntu16.04的catkin_depends应删去catkin_package,否则会报错

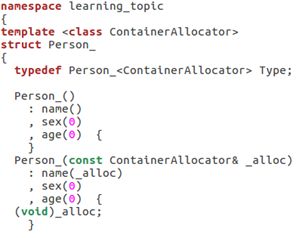
回到工作空间根目录,catkin_make编译:
编译完成后会在devel里生成Person.h头文件
其中learning_topic类:
创建发布者:
/**
* 该例程将发布/person_info话题,自定义消息类型learning_topic::Person
*/
#include 创建一个订阅者:
/**
* 该例程将订阅/person_info话题,自定义消息类型learning_topic::Person
*/
#include learning_topic配置CMakelists:
• 设置需要编译的代码和生成的可执行文件;
• 设置链接库;
• 添加依赖项
add_executable(person_publishersrc/person_publisher.cpp)
target_link_libraries(person_publisher${catkin_LIBRARIES})
add_dependencies(person_publisher${PROJECT_NAME_generate_messages_cpp)
add_executable(person_subscribersrc/person_subscriber.cpp)
target_link_libraries(person_subscriber${catkin_LIBRARIES})
add_dependencies(person_subscriber${PROJECT_NAME_generate_messages_cpp)
#其中add_dependencies使可执行程序和动态生成的程序产生依赖。
编译运行:
roscore
rosrun learning_topic person_subscriber
rosrun learning_topic person_publisher
![]()
![]()
这时候如果关闭ros_master并不会影响话题的发布和接收,
这是由于ros_master只作为最初节点之间建立连接的一个媒介,
而如果要新加入一个节点,ros_master就必须存在。
查看计算图:
