L1正则化、L2正则化的多角度分析和概率角度的解释
L1正则化、L2正则化的公式如下
min w L 1 ( w ) = min w f ( w ) + λ n ∑ i = 1 n ∣ w i ∣ min w L 2 ( w ) = min w f ( w ) + λ 2 n ∑ i = 1 n w i 2 \min_wL_1(w)=\min_w f(w)+\frac{\lambda}{n}\sum_{i=1}^n|w_i|\\ \min_wL_2(w)=\min_wf(w)+\frac{\lambda}{2n}\sum_{i=1}^nw_i^2 wminL1(w)=wminf(w)+nλi=1∑n∣wi∣wminL2(w)=wminf(w)+2nλi=1∑nwi2
从优化问题的视角来看
min x L ( w ) < = > min w f ( w ) s . t . ∑ i = 1 n ∣ w i ∣ < C \min_xL(w)<=> \min_w f(w)\\ s.t. \sum_{i=1}^n|w_i|
L1正则的限制条件,在坐标轴上显示则是一个正方形,与坐标轴的交点分别是(0,C),(C,0),(0,-C),(-C,0)
L2正则的限制条件,在坐标轴上显示则是一个圆,与坐标轴的交点分别是(0,C),(C,0),(0,-C),(-C,0)
从梯度视角来看
∂ L 1 ( w ) ∂ w i = ∂ f ( w ) ∂ w i + λ n s i g n ( w i ) w i ′ = w i − η ∂ L 1 ( w ) ∂ w i w i ′ = w i − η ∂ f ( w ) ∂ w i − η λ n s i g n ( w i ) \frac{\partial L_1(w)}{\partial w_i}=\frac{\partial f(w)}{\partial w_i}+\frac{\lambda}{n}sign(w_i)\\ w_i^{'}=w_i - \eta \frac{\partial L_1(w)}{\partial w_i}\\ w_i^{'}=w_i - \eta \frac{\partial f(w)}{\partial w_i} - \eta \frac{\lambda}{n}sign(w_i) ∂wi∂L1(w)=∂wi∂f(w)+nλsign(wi)wi′=wi−η∂wi∂L1(w)wi′=wi−η∂wi∂f(w)−ηnλsign(wi)
∂ L 2 ( w ) ∂ w i = ∂ f ( w ) ∂ w i + λ n w i w i ′ = w i − η ∂ L 2 ( w ) ∂ w i w i ′ = w i − η ∂ f ( w ) ∂ w i − η λ n w i \frac{\partial L_2(w)}{\partial w_i}=\frac{\partial f(w)}{\partial w_i}+\frac{\lambda}{n}w_i\\ w_i^{'}=w_i - \eta \frac{\partial L_2(w)}{\partial w_i}\\ w_i^{'}=w_i - \eta \frac{\partial f(w)}{\partial w_i} - \eta \frac{\lambda}{n}w_i ∂wi∂L2(w)=∂wi∂f(w)+nλwiwi′=wi−η∂wi∂L2(w)wi′=wi−η∂wi∂f(w)−ηnλwi
从L1 η λ n s i g n ( w i ) \eta \frac{\lambda}{n}sign(w_i) ηnλsign(wi)和L2 η λ n w i \eta \frac{\lambda}{n}w_i ηnλwi来看,L1与L2不一样的地方在于L1会减 s i g n ( w i ) sign(w_i) sign(wi)倍的 η λ n \eta \frac{\lambda}{n} ηnλ.而L2会减 w i w_i wi倍的 η λ n \eta\frac{\lambda}{n} ηnλ。当w_i在 [ 1 , + ∞ ) [1,+\infty) [1,+∞)时,L2获得比L1更快的减小速率。当 w i w_i wi在(0,1)时,L1比L2获得更快的减小速率。并且当 w i w_i wi越小时,L1更容易减小接近于0.而L2更不容易变化,因此L1会获得更多的接近于0的w。即L1比L2更容易获得sparse的w。
从概率的视角来看
为f(w)加入正则化,相当于为f(w)的参数w加先验,那要求w满足某一分布。
L1正则化相当于为w加入Laplace分布的先验,L2正则化相当于为w加入Gaussian分布的先验
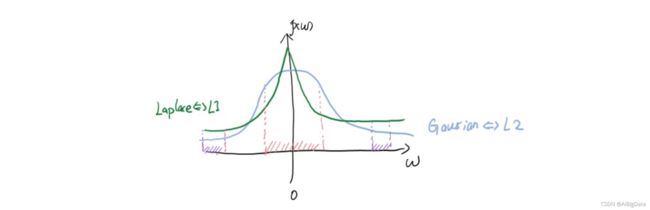
很明显可以观察出,在两边紫色部分, P G ( w ) < P L ( w ) P_G(w)
在中间红色线条区域 P L ( w ) < P G ( w ) P_L(w)
问题,为什么L1正则先验分布时Laplace分布,L2正则先验分布时Gaussian分布。接下来从最大后验概率的角度进行推导和分析。在机器学习建模中,我们知道了x和y以后,需要对参数w进行建模。那么后验概率表达式如下:
M A P = l o g p ( y ∣ X ) = l o g P ( y ∣ X , w ) P ( w ) = l o g P ( y ∣ X , w ) + l o g P ( w ) MAP=log^{p(y|X)}=log^{P(y|X,w)P(w)}=log^{P(y|X,w)}+log^{P(w)} MAP=logp(y∣X)=logP(y∣X,w)P(w)=logP(y∣X,w)+logP(w)
可以看出后验概率函数为在似然函数的基础上增加了 l o g P ( w ) log^{P(w)} logP(w),P(w)的意义是对权重系数w的概率分布的先验假设,在收集到训练样本X,y后,则可根据w在X,y下的后验概率对w进行修正,从而做出对w的更好地估计。若假设w的先验概率分布为0均值的高斯分布,即 w ∼ N ( 0 , δ 2 ) w\sim N(0,\delta^2) w∼N(0,δ2)
则有
l o g P ( w ) = l o g ∏ j P ( w j ) = l o g ∏ j [ 1 2 π δ e − w j 2 2 δ 2 ] = ∑ j ( l o g [ 1 2 π δ e − w j 2 2 δ 2 ] ) = ∑ j ( l o g [ e − w j 2 2 δ 2 ] ) + j l o g 1 2 π δ 后 部 分 对 于 w 相 当 于 一 个 常 数 = ∑ j ( − w j 2 2 δ 2 ) + C = − 1 2 δ 2 ∑ j w j 2 + C log^{P(w)}=log^{\prod _j P(w_j)}=\\ log^{\prod_j[\frac{1}{\sqrt{2\pi}\delta}e^{-\frac{w_j^2}{2\delta^2}}]}\\ =\sum_j(log^{[\frac{1}{\sqrt{2\pi}\delta}e^{-\frac{w_j^2}{2\delta^2}}]})\\ =\sum_j(log^{[e^{-\frac{w_j^2}{2\delta^2}}]}) + j log^{\frac{1}{\sqrt{2\pi}\delta}} 后部分对于w相当于一个常数\\ =\sum_j(-\frac{w_j^2}{2\delta^2})+C\\ =-\frac{1}{2\delta^2}\sum_jw_j^2+C logP(w)=log∏jP(wj)=log∏j[2πδ1e−2δ2wj2]=j∑(log[2πδ1e−2δ2wj2])=j∑(log[e−2δ2wj2])+jlog2πδ1后部分对于w相当于一个常数=j∑(−2δ2wj2)+C=−2δ21j∑wj2+C
可以看出,在高斯分布下 l o g P ( w ) log^{P(w)} logP(w)的效果等价于在代价函数中增加L2正则项。
若假设w服从均值为0,参数为a的拉普拉斯分布,即
P ( w j ) = 1 2 a e − ∣ w j ∣ a P(w_j)=\frac{1}{2a}e^{-\frac{|w_j|}{a}} P(wj)=2a1e−a∣wj∣
则有
l o g P ( w ) = l o g ∏ j P ( w J ) = l o g ∏ j 1 2 a e − ∣ w j ∣ a = ∑ j ( l o g 1 2 a e − ∣ w j ∣ a ) = ∑ j ( l o g e − ∣ w j ∣ a ) + j l o g 1 2 a 后 者 对 于 w 相 当 于 常 数 = − 1 a ∑ j ∣ w j ∣ + C log^{P(w)}=\\ log^{\prod _j P(w_J)}=\\ log^{\prod _j \frac{1}{2a}e^{-\frac{\left| w_j \right|}{a}}}=\\ \sum_j(log^{\frac{1}{2a}e^{-\frac{\left| w_j \right|}{a}}})=\\ \sum_j(log^{e^{-\frac{\left| w_j \right|}{a}}}) + jlog^{\frac{1}{2a}} 后者对于w相当于常数=\\ -\frac{1}{a}\sum_j|w_j| + C logP(w)=log∏jP(wJ)=log∏j2a1e−a∣wj∣=j∑(log2a1e−a∣wj∣)=j∑(loge−a∣wj∣)+jlog2a1后者对于w相当于常数=−a1j∑∣wj∣+C
可以看到,在拉普拉斯分布下 l o g P ( w ) log^{P(w)} logP(w)的效果等价在代价函数中增加L1正则。
L1正则化可通过假设权重w的先验分布为拉普拉斯分布,由最大后验概率估计导出。
L2正则化可通过假设权重w的先验分布为高斯分布,由最大后验概率估计导出。
参考1
参考2