尝尝MicroPython控制单片机
1. 摘要
本文档主要介绍,在python环境下,如何开发嵌入式应用程序,以STM32H43板卡为例介绍. 从系统环境搭建,到编译,到用python实现硬件控制。可作为入门教程。
2. 准备工作
2.1 开发环境搭建
2.1.1 Win10自带linux系统
开发环境可以自己使用虚拟机然后安装ubuntu系统,而Win10系统自带有linux系统,只需要使能就可以使用,比较方便,所以我们以win10自带的linux子系统为例。
在控制面板中启用linux子系统,点击启用或关闭Windows功能。

如下图勾选适用于linux的windows子系统,然后重启电脑


点击立即重新启动
重启后进入windows 10 应用商店,搜索Ubuntu,可以选择18.04或者20.02进行安装

下载安装完毕,点击启动

设置用户名和密码,

安装的默认路径是
C:Usershpp19AppDataLocalPackagesCanonicalGroupLimited.Ubuntu18.04onWindows_79rhkp1fndgscLocalState ootfshome
路径不能修改,至此linux环境就好了,可以输入一些常用命令看看,如ls,cp, rm等命令。
Win10地下安装的linux子系统只支持命令行, 没有自己用虚拟机安装的功能全面,但是对于开发micropython 足够。
2.1.2 虚拟机安装
如果不想用windows10 安装的,想自己搭建也是可以,需要安装虚拟机和下载ubunut的iso镜像文件,进行安装,这种安装网上很多,我们就不详细列出了,推荐第一种安装。
![]()
2.1.3 依赖软件安装
Git安装,git用来获取软件包

使用克隆micropython的软件包,也可以去官网自己下载,拷贝到linux环境的home目录下。
使用git 克隆软件包
如果网络不好,要等一段时间,比较慢。也可以自己到官网下载,我已经下好,大家可以找我索取当前最新板micropython-1.13
http://www.micropython.org/download/

2.1.4 Micropython 目录结构
目录结构比较重要,只有清除目录结构了,你才能移植到不同的板卡。
详细的目录结构介绍可以参考README.md

主要关注下目前micropython支持的ST开发板,和我们关系比较大的是H7系列,可以看到目前支持很多的ST芯片。

3. 交叉编译工具链
在终端输入sudo apt install gcc make 命令安装 gcc, make
安装完后可以查看下版本


输入 sudo apt-get install gcc-arm-none-eabi 安装针对ARM的编译器
如果你的交叉工具链安装下载比较慢的话,请按以下步骤修改,因为linux自带的软件源地址都是国外的,国内更新下载安装的话会比较慢,需要将列表更新为国内

将打开的文件内容全部删除掉,替换为以下镜像源
deb http://mirrors.aliyun.com/ubuntu/ focal main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ focal-security main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ focal-updates main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ focal-proposed main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ focal-backports main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ focal main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ focal-security main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ focal-updates main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ focal-proposed main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ focal-backports main restricted universe multiverse
修改完软件源后,更新软件列表和软件:
sudo apt update
sudo apt upgrade
如果对vim编辑器命令不熟悉,可以自己百度,或者直接在以下目录
C:Usershpp19AppDataLocalPackagesCanonicalGroupLimited.Ubuntu20.04onWindows_79rhkp1fndgscLocalState ootfsetcapt 下将sources.list文件替换为以下阿里云镜像源,这样速度会很快。
编译mpy-cross, mpy-cross是一个micropython的辅助工具,在编译过程中会用到,在micropython的源码根目录中输入命令make -C mpy-cross

至此交叉编译工具链就安装完毕,可以编译STM32的程序了。
4. 编译程序
在源码根目录下输入命令make -C ports/stm32 如果不指定BOARD,则默认编译的是ports/stm32下的PYBV10板子,而我们需要的是能在H743上跑,所以需要裁剪移植一个对H743的板子,查看下可以看到micropython目前支持的STM32板卡有F091, F401,F429,F446,F746,H743等,
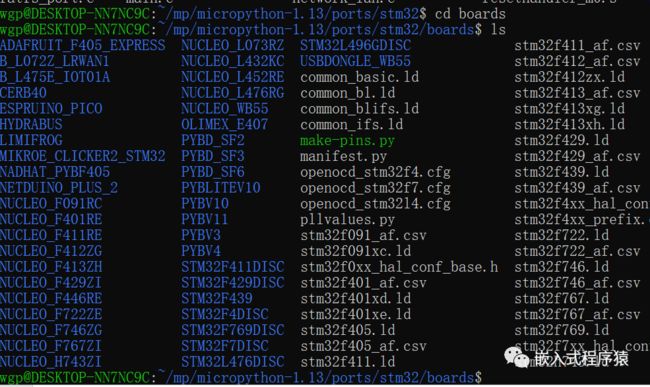
复制NUCLEO_H743ZI命名为BODEBOARD

输入命令ls查看下已经有BODEBOARD文件夹和文件,进入查看下

主要有5个文件,而我们就需要修改这里面的文件
首先修改时钟为25000000,主要是修改stm32h7xx_hal_conf.h文件

修改mpconfigboard.h
将时钟修改为如下配置,可以复制我们之前IAR工程下的时钟配置。

修改其他管脚,这一节我们只以修改三个LED和UART1等管脚为例,在文档的下一个版本更新中,会更新所有用到的硬件管脚,还是在这个文件中继续修改对应的硬件管脚


保存退出
修改pins.csv文件
添加LED和UART1的管脚



保存退出。
因为我们是参照的NUCLEO_H743ZI,所以mpconfigboard.mk文件不用修改。至此修改完毕,可以编译,在micropython根目录下输入命令 make -C ports/stm32 BOARD=BODEBOARD

等待编译完成。

可以看到生成了.hex和.dfu固件,任选一种下载入H743板子,这样板卡里就有了python解析器,可以识别python语言

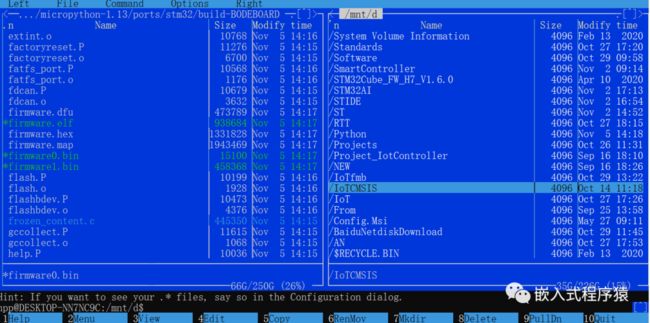
编译好的固件怎么样复制到windows主机呢,当然你可以直接去生成的目录底下拷贝,在win10 的linux子系统中默认已经将windows分区挂载好了,我们可以在/mnt目录下看到

这样我们就可以直接使用命令cp拷贝到windows了,当然如果你不习惯命令行操作,可以安装midinight commander 软件,可以方便的管理文件,输入命令sudo apt install mc 进行安装,安装完后,输入mc可以直接打开软件。
不管用那种方法,将Hex文件下载到硬件板卡,下载完毕后,给板子重新上电,可以看到出现一个PYBFLASH类似U盘的盘符,打开里面有boot.py
main.py 等四个文件,我们最后的应用程序直接写在main.py就可以运行了。

5. 测试
我们先来演示使用putty来控制板子上的LED灯,打开putty,配置波特率和串口号,

导入LED库,就可以控制LED了
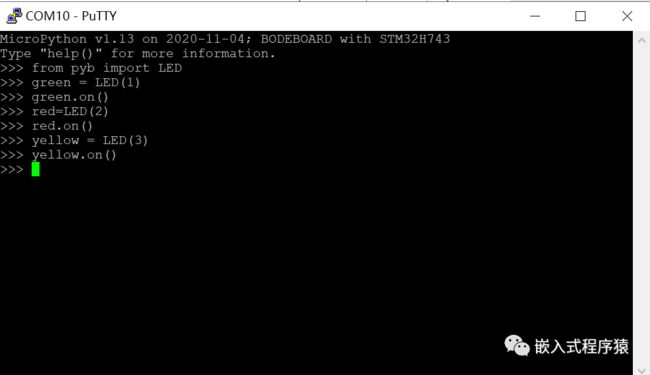
可以观察H743的板子三个LED灯依次点亮,通过Putty可以控制硬件就完成了,那么如何让板子上电就三个LED灯点亮,而不需要通过Putty控制呢。?
这就要编辑我们前面提到的main.py文件,使用任何文本编辑器打开,写入python代码,保存退出,就可以运行了。

通过以上代码就实现了LED的点亮控制,实现用python控制单片机。至此就可以用python编写很多好玩的东西在单片机上跑了。
6. 参考文档
序号 |
文献 |
1 |
www.micropython.org |