2021/11/22串行口的相关问题
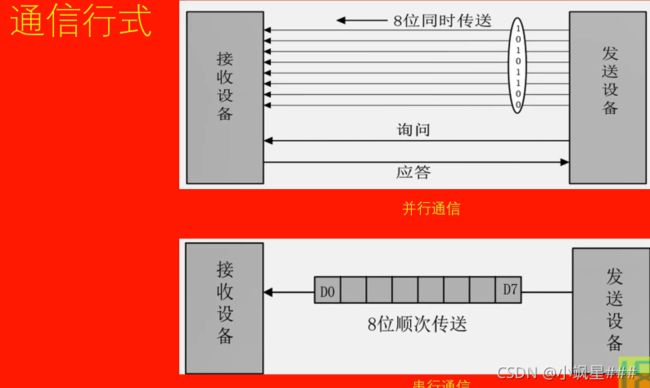
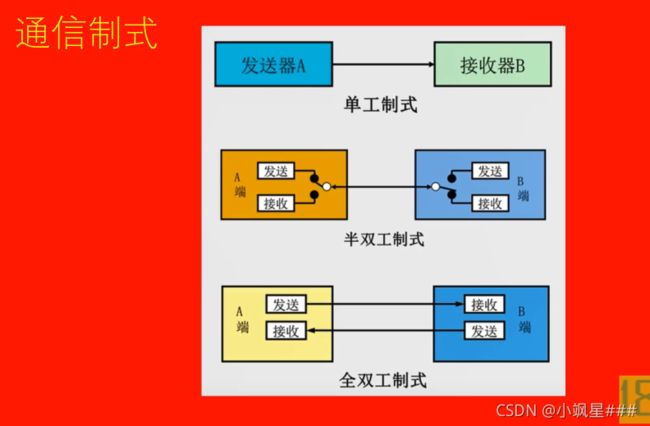
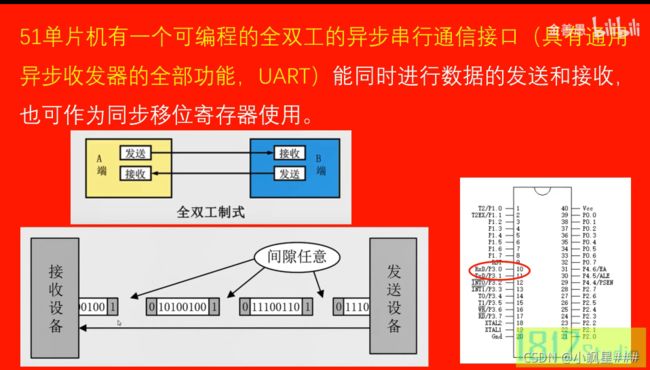
1.预备知识
原理




PART1:
1.简单查询方式实现一帧数据的传送
#include稍微改进一下:封装为传递函数sendBytes()
#include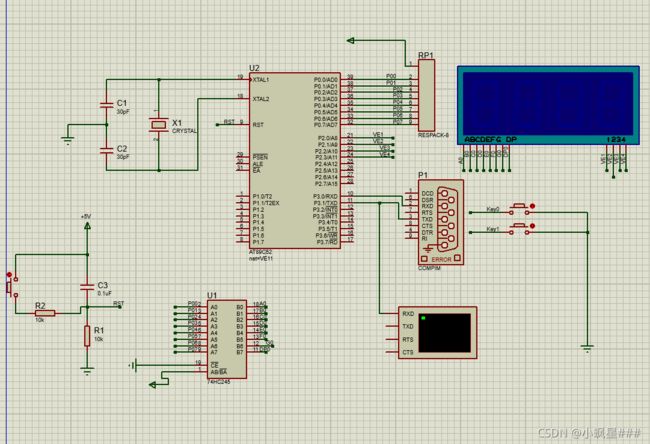
2.中断方式实现一帧数据的发送
#include
3.简单查询实现一串数据传输
#include
4.重定向printf
首先了解C语言51单片机里面的printf不同数据类型输出格式
#include 正式开始
#include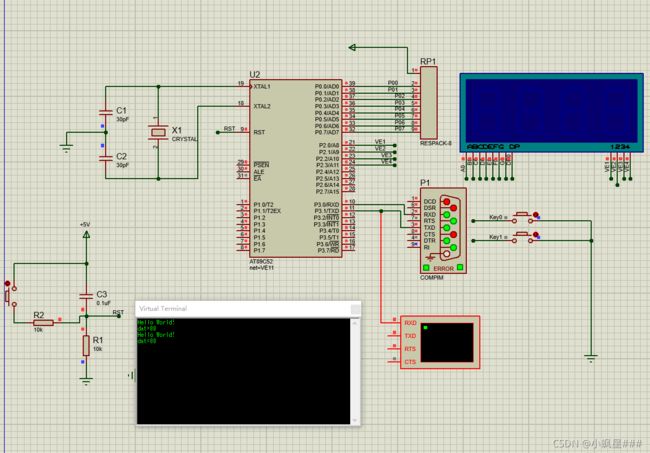
PART 2:
1. 单片机串行口从上位机接受数据帧
#include
传送一帧数据改进(拓展一下):
#include
简单实现串行口输入控制LED点亮
#include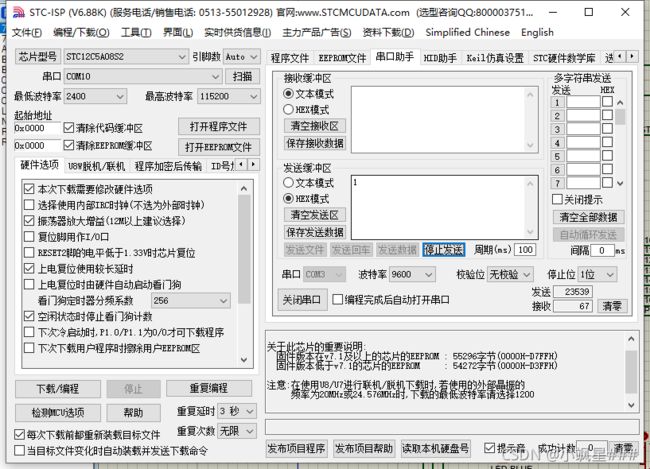

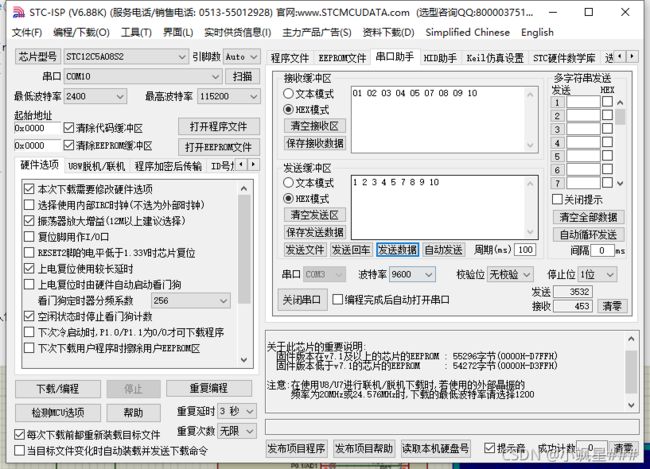
简单实现串口数据从上位机接受一串固定长度数据(长度已知)
#include
简单实现串口数据从上位机接受一串不固定长度数据(长度不固定)(缺点:当0D 作为数据是传不过去的,因为会被认为是结束符号,可以选一个不常用的符号,另外包括结束符在内的数据长度需要<=缓冲区长度)
#include
Part3:串口+定时器超时检测实现接收一串数据
#include在这里插入代码片

判读数据帧头来接收一串数据的串口通信程序编写
#include
串口中断中即时解析数据帧头的通信程序(<帧头>AA 55 +01或02+两位数据+0D<帧尾>)
#include

Part 3:串口中断即时解析用户自定义通讯协议(接收数据字节固定)的编程实现(固定长度)
点击这里可以进行校验的计算
#include
串口中断即时解析用户自定义通讯协议(协议内带字节长度及接收应答处理)的编程实现
#include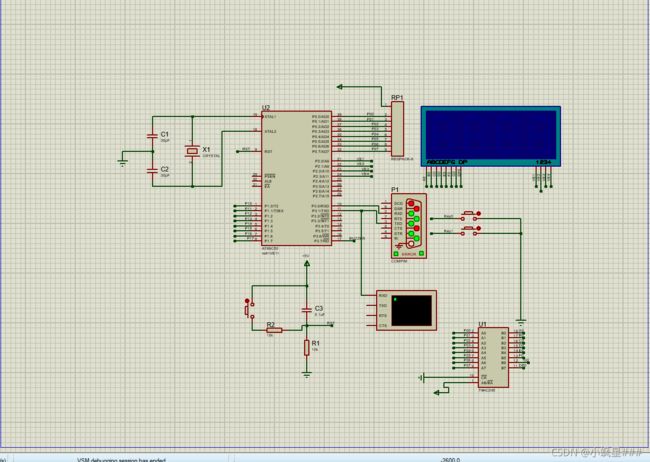

#include