FAPI专题-5:5G nFAPI接口 - 中文规范-4-VNF与PHY之间的时隙定时管理
作者主页(文火冰糖的硅基工坊):文火冰糖(王文兵)的博客_文火冰糖的硅基工坊_CSDN博客
本文网址:https://blog.csdn.net/HiWangWenBing/article/details/120624278
目录
第1章 VNF与PHY之间的时隙定时管理概述
1.1 概述
1.2 PHY Synchronization
1.3 Slot时隙信号
1.4 SFN的对齐与同步
第2章 VNF与PHY的时隙延时与对齐
2.1 VNF与PHY定时窗口管理
2.2 Delay management procedure链路延时管理过程
2.3 延时和offset演算过程如下
2.4 时隙定时修正的基本原理
2.5 时隙定时的修正方法
2.6 修正后的效果
第1章 VNF与PHY之间的时隙定时管理概述
1.1 概述
nFAPI的P7接口消息流程是由Slot时隙驱动的,每个消息的处理是基于时隙的。
因此PHY物理层与MAC层的Slot时隙对齐与同步就非常重要。
本章节重点阐述nFAPI与FAPI在时隙同步上的差别。
1.2 PHY Synchronization
PHY同步过程涉及到不同的PHY实例之间的天线传输时间的对齐或校准。
PHY同步通常是指在PHY实例与VNF之间实现公共的定时基准。
对于干扰管理和其他无线PHY干扰协调技术,PHY实例可以优选对齐它们的时基(定时基准)。
PHY的同步分为4个层次:
- 物理层PHY时钟同步:时钟同步确保物理层芯片的采样时钟、产生时隙Slot的时钟频率是精准的,如20M的采用率32.76M时钟,必须是精确的。(不同小区的切换)
- 物理层PHY Slot时隙同步:在物理层时钟同步的基础之上,需要确保125us、250个μs、 500 μs或1ms时隙的周期/频率和时隙的相位都是对齐的。(不同小区的切换)
- 物理层PHY10ms帧的SFN系统帧号的对齐(不同小区的切换)
- VNF与PHY的时隙对齐(调度)
与谁对齐呢?当然是与全网的参考时钟,如GPS或1588 Grand master对齐。
关于1-3层次时钟源的选择与时钟同步,已经超出本章的范围,请参考基站的定时与同步相关的 。本文重点放在VFN与PHY时间的同步问题, 这是nFAPI要解决的问题。
VNF与PHY之间是UDP数据传输,nFAPI延迟管理确保P7(U面)时隙过程及时发生;
具体地说,PHY实例期望来自VNF的基于P7时隙的消息在接收时间窗口时间间隔内到达PHY实例,PHY维持该接收时间窗口间隔,并缓冲和处理对时间敏感的P7消息(如DL_TTI.request、UL_TTI.request、UL_DCI.request、Tx_Data.request), 然后把这些消息应用于它们的目标时隙。也就是说,VNF需要提前n个时隙发送空口消息,PHY暂时缓存和处理这些消息,等到这些消息的实际时隙到达时,再发送到空口。
1.3 Slot时隙信号
在FAPI中,MAC层与PHY在同一个物理实体中,通过本地高速总线相连,PHY实例使用SLOT.indication消息周期性地向MAC层指示slot的开始,slot的周期取决与子载波的间隔,slot的周期可以是125us、250个μs、 500 μs或1ms。
在nFAPI中,VNF和PNF之间可以通过以太网fronthaul相连,以太网数据帧传输时间存在预期的抖动,使得原先通过SLOT.indication消息通知Slot间隔的机制不太适合于nFAPI。
nFAPI是通过PHY的sync过程(2.1.3.3)和API消息的定时过程(2.1.3.6)的组合,来确保MAC层与PHY层的时隙对齐。
在nFAPI中,VNF与PHY在不同的物理实体上,再加上网络的延时,独立于PHY的VNF TTI定时器是不可缺少的。
1.4 SFN的对齐与同步
FAPI的SFN/SL同步机制不适用于nFAPI,nFAPI定义了新的SFN/SL同步机制.
如下描述的PHY同步机制和延迟管理机制:
- 确保不同的PHY实例之间的同步
- 确保VNF和PHY实例之间及时的消息传递
SFN的对齐与同步,本质上是10m帧同步。
第2章 VNF与PHY的时隙延时与对齐
2.1 VNF与PHY定时窗口管理
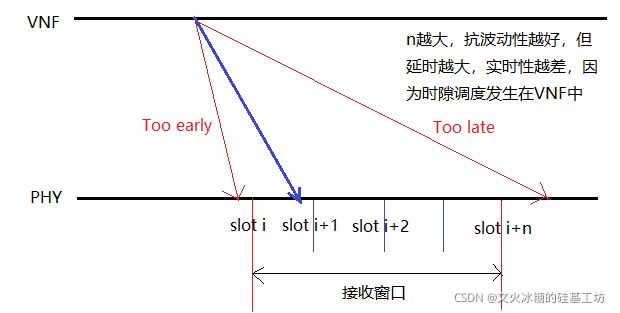
每个PHY都维持一个接收定时窗口,该定时窗口的特性包括:
- 窗口的时间长度,通过为时隙Slot的长度:125us、250个μs、 500 μs或1ms,取决于子载波的宽度。
- 目标时隙之前的偏移量offset,通常情况需要提前2-3个时隙。
PHY对接收到的P7消息,处理机制如下:
- 落在时间窗口内的消息:得到有效的处理。
- 落在时间窗口外的消息:会比标志位“too early” 或“too late”,然后通过“Timing Info”的方式报告给VNF.
决定VNF与PHY定时的因素有三:
(1)链路传输的延时Delay
(2)各自TTI定时器的偏移offset
(3)窗口的大小
本文重点关注(2)和(3)
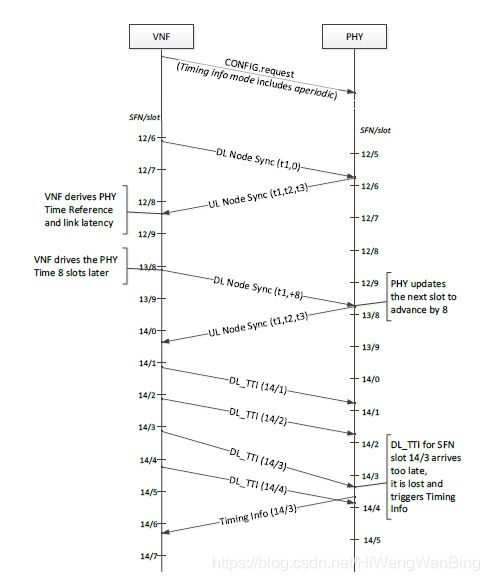
2.2 Delay management procedure链路延时管理过程
链路延时管理过程用于实时地测量VNF与PHY之间的UDP传输延时。
VNF和PHY实例之间的nFAPI延迟管理机制,可用于实时地测量VNF与PHY之间的UDP传输延时,建立它们之间的定时基准差。同时,还允许VNF指示PHY实例,基于VNF定义的offset偏移来更新其时隙号。
P7过程内部的时隙定时的需求是通过PNF PARAM流程来进行的。
2.3 延时和offset演算过程如下
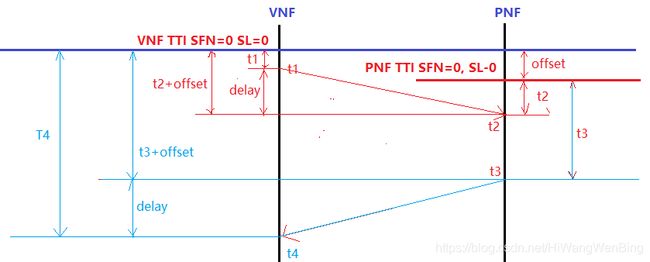
前提:
- 假设VNF 10ms帧起始TTI的时间为0, (SFN=0, SL=0)
- 假设PNF 10ms帧起始TTI相对于VNF 10ms帧的TTI的偏移为offset.
- 假设网络的传输延时为delay,且上下行延时相同。
- t1,t4的时间不是绝对时间,而是相对于VNF 10ms帧起始TTI的偏移。
- t2,t3的时间不是绝对时间,而是相对于PNF 10ms帧起始TTI的偏移。
计算过程:
t2 + offset = t1 + delay =>delay – offset = t2 – t1
t4 = t3 _+ offset + delay => delay + offset = t4 – t3
delay = [ (t4-t3) + (t2-t1)]/2
offset = [ (t4-t3) - (t2-t1)]/2
通过公式,VNF很容易计算出VNF与PNF之间的传输延时delay以及PNF的10ms帧的起始TTI相对于VNF的10ms帧的起始TTI时间的偏移offset。
2.4 时隙定时修正的基本原理
然后,VNF就可以通过CONFIG.request对PHY的TTI进行修正。
或者,VNF修正自己的TTI, 确保VNF和PNF之间的TTI是对齐的(包含网络传输延时)。
修改的原理如下:

- 收到TTI修正的请求,设定标志位
在通过delay测量后,无论是在VNF上修正TTI,还是在PHY上修正,TTI, 收到TTI修正的请求,其实都不一定在TTI的开始时间点,也就是说,收到TTI修正请求的时间点,其实是不确定的。
为了使得修正更加的准确、无误,此时不应该立即修正TTI, 而是设定一个TTI的标志位和修正偏移。
- 开始修正
每个TTI中断发生后,首先检查是否需要修正TTI, 如果需要,则启动修正。
启动修正的方法是:在下次发生中断的绝对计数或时间上,叠加(增加或减少)一个offset。
- 修正生效
等待下次中断的发生,即TTI修正后,第一次生效的时间。
- 修正后TTI周期保持不变
修正后,TTI定时器的周期恢复到原先的周期.
2.5 时隙定时的修正方法
至于VNF或PHY如何修正时隙偏移,并不在nFAPI的规范中。
在实际实现中,虽然VNF和PHYT的修改方法不同。
- VNF:通常采用Linux OS的定时器,因此修正时隙定时的方法是重启软件定时器或修改定时器的起始时间点。
- PHY:通常采用的是硬件中断,因此修正时隙定时的方法是修正硬件定时的延时。
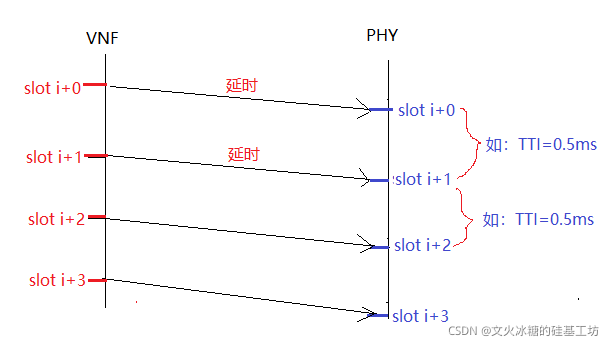
2.6 修正后的效果
同步之后,VNF的TTI起始边沿实际上是提前于PHY的TTI起始边沿的, 如下图所示:
作者主页(文火冰糖的硅基工坊):文火冰糖(王文兵)的博客_文火冰糖的硅基工坊_CSDN博客
本文网址:https://blog.csdn.net/HiWangWenBing/article/details/120624278