STM32的RS485通信
1.简介
与CAN类似,RS-485是一种工业控制环境中常用的通讯块议,它具有抗干扰能力强、传输距离远的特点。RS-485通讯协议由RS-232协议改进而来,协议层不变,只是改进了物理层,因而保留了串口通讯协议应用简单的特点。
 用的是SP3485芯片:
用的是SP3485芯片:
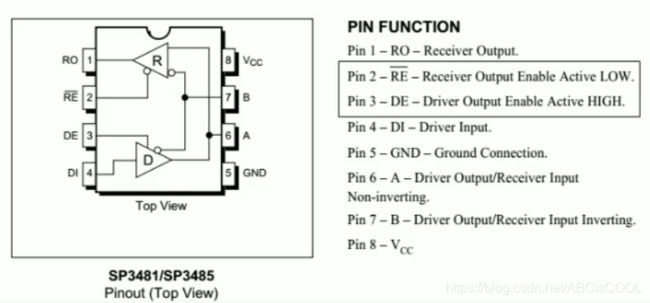
通信的时候,A端口连接另一个设备的A端口,B端口连接B端口,不是交叉相连。
最多能够连接128个设备,所以在某种情况下可以取代网络,RE引脚用来控制通讯数据的方向,要么进行接收,要么进行发送。
本质还是串口通信
RS485_RE为高电平的时候,DE为高电平有效,允许发送数据
RS485_RE为低电平的时候,RE为低电平有效,允许接收数据
所以当你要发送数据的时候 ,需要将与RE连接的引脚置为高电平、
2.编码
所以我们大致可以得到一个程序模板:
发送数据函数
void rs485_send(uint8_t *pbuf,uint32_t len)
{
//设置RS458为发送模式,将所连引脚设置高电平输出
PGout(2)=1;
//调用串口2的库函数发送数据
...
//延时100us
delay_us(100);
//设置RS485为接收模式
PGout(2)=0;
}
接收函数,使用中断接收
void USART2_IRQHandler(void)
{
uint8_t data=0;
if(USART2_GetITStatus(USART2,USART_IT_RXNE)!=RESET)
data = USART2_ReceiveData(USART2);
}
下面是演示代码,供参考
#include "stm32f4xx.h"
#include "stm32f4xx_gpio.h"
#include "stm32f4xx_rcc.h"
#include "stm32f4xx_usart.h"
//模式控制
#define RS485_TX_EN PGout(8) //485模式控制.0,接收;1,发送.
static GPIO_InitTypeDef GPIO_InitStructure;
static USART_InitTypeDef USART_InitStructure;
static NVIC_InitTypeDef NVIC_InitStructure;
void USART1_Init(uint32_t baud)
{
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); //使能GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE); //使能USART1时钟
//串口1对应引脚复用映射
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1); //GPIOA9复用为USART1
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1); //GPIOA10复用为USART1
//USART1端口配置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //GPIOA9与GPIOA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA9,PA10
//USART1 初始化设置
USART_InitStructure.USART_BaudRate = baud; //波特率设置
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1; //一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No; //无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_Cmd(USART1, ENABLE); //使能串口1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //开启相关中断
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; //串口1中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3; //抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority =3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
}
void USART1_WriteBytes(uint8_t *pbuf,uint32_t len)
{
uint32_t i =0;
for(i=0; i<len; i++)
{
//发送数据
USART_SendData(USART1,*pbuf++);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);
}
}
//初始化IO 串口2
//baud:波特率
void RS485_Init(uint32_t baud)
{
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); //使能GPIOA时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE); //使能USART2时钟
//串口2引脚复用映射
GPIO_PinAFConfig(GPIOA,GPIO_PinSource2,GPIO_AF_USART2); //GPIOA2复用为USART2
GPIO_PinAFConfig(GPIOA,GPIO_PinSource3,GPIO_AF_USART2); //GPIOA3复用为USART2
//USART2
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2 | GPIO_Pin_3; //GPIOA2与GPIOA3
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA2,PA3
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOG,ENABLE); //使能GPIOA时钟
//PG8推挽输出,485模式控制
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //GPIOG8
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOG,&GPIO_InitStructure); //初始化PG8
//USART2 初始化设置
USART_InitStructure.USART_BaudRate = baud; //波特率设置
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1; //一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No; //无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART2, &USART_InitStructure); //初始化串口2
USART_Cmd(USART2, ENABLE); //使能串口 2
USART_ClearFlag(USART2, USART_FLAG_TC);
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE); //开启接收中断
//Usart2 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3; //抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority =3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化NVIC寄存器
RS485_TX_EN=0; //默认为接收模式
}
//RS485发送len个字节.
//pbuf:发送区首地址
//len:发送的字节数
void RS485_Send_Data(uint8_t *pbuf,uint32_t len)
{
uint32_t i;
RS485_TX_EN=1; //设置为发送模式
for(i=0; i<len; i++) //循环发送数据
{
USART_SendData(USART2,pbuf[i]); //发送数据
while(USART_GetFlagStatus(USART2,USART_FLAG_TXE)==RESET);
}
delay_us(100);
RS485_TX_EN=0; //设置为接收模式
}
int main(void)
{
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8);
//设置中断优先级分组2
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
//串口1,波特率115200bps,开启接收中断
USART1_Init(115200);
//RS485初始化,115200bps
RS485_Init(115200);
while(1)
{
}
}
void USART1_IRQHandler(void) //串口1中断服务程序
{
uint8_t d;
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断
{
//接收数据
d = USART_ReceiveData(USART1);
RS485_Send_Data(&d,1);
}
}
void USART2_IRQHandler(void)
{
uint8_t d;
if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET)//接收到数据
{
d =USART_ReceiveData(USART2); //读取接收到的数据USART2->DR
USART1_WriteBytes(&d,1);
}
}