在iOS-底层原理7:isa与类关联的原理和iOS-底层原理8:类 & 类结构分析中,分析了objc_class中isa和bits,这篇文章主要是分析objc_calss中的cache属性
1、源码初探
step1: 打开objc4源码, 搜索objc_class
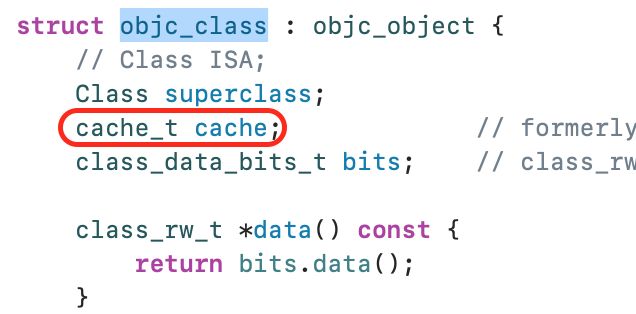
step2: 点击进入cache_t
2.1: 暂时剔除const、void、static和函数
struct cache_t {
#if CACHE_MASK_STORAGE == CACHE_MASK_STORAGE_OUTLINED//macOS、模拟器 -- 主要是架构区分
// explicit_atomic 显示原子性,目的是为了能够 保证 增删改查时 线程的安全性
//等价于 struct bucket_t * _buckets;
//_buckets 中放的是 sel imp
//_buckets的读取 有提供相应名称的方法 buckets()
explicit_atomic _buckets;
explicit_atomic _mask;
#elif CACHE_MASK_STORAGE == CACHE_MASK_STORAGE_HIGH_16 //64位真机
explicit_atomic _maskAndBuckets;//写在一起的目的是为了优化
mask_t _mask_unused;
//以下都是掩码,即面具 -- 类似于isa的掩码,即位域
// 掩码省略....
#elif CACHE_MASK_STORAGE == CACHE_MASK_STORAGE_LOW_4 //非64位 真机
explicit_atomic _maskAndBuckets;
mask_t _mask_unused;
//以下都是掩码,即面具 -- 类似于isa的掩码,即位域
// 掩码省略....
#else
#error Unknown cache mask storage type.
#endif
#if __LP64__
uint16_t _flags;
#endif
uint16_t _occupied;
//方法省略.....
}
查看其中的宏定义
// 是真机且是64位系统
#if defined(__arm64__) && __LP64__
#define CACHE_MASK_STORAGE CACHE_MASK_STORAGE_HIGH_16
// 是真机但不是64位系统
#elif defined(__arm64__) && !__LP64__
#define CACHE_MASK_STORAGE CACHE_MASK_STORAGE_LOW_4
// 其他
#else
#define CACHE_MASK_STORAGE CACHE_MASK_STORAGE_OUTLINED
#endif
2.2:现在我以macos为平台来进行探究。简化cache_t代码:
struct cache_t {
explicit_atomic _buckets;
explicit_atomic _mask;
uint16_t _flags;
uint16_t _occupied;
};
但如果是真机呢
struct cache_t {
explicit_atomic _maskAndBuckets;
mask_t _mask_unused; // 猜测是系统暂时没用到的参数。 占坑
// mask掩码移动位数
static constexpr uintptr_t maskShift = 48;
// 掩码清零4位
static constexpr uintptr_t maskZeroBits = 4;
// 可以存储的最大mask掩码值(2^16 - 1)
static constexpr uintptr_t maxMask = ((uintptr_t)1 << (64 - maskShift)) - 1;
// 用于从`_maskAndBuckets`中找回`buckets`的指针位置
// (1 << (48 - 4)) - 1 buckets最大位数只有43位
static constexpr uintptr_t bucketsMask = ((uintptr_t)1 << (maskShift - maskZeroBits)) - 1;
// 没有足够的空间来存放buckets了
static_assert(bucketsMask >= MACH_VM_MAX_ADDRESS, "Bucket field doesn't have enough bits for arbitrary pointers.");
uint16_t _flags;
uint16_t _occupied;
}
可以看到在真机的架构中,mask和bucket是写在一起,目的是为了优化,可以通过各自的掩码来获取相应的数据
step3: 进入bucket_t源码
struct bucket_t {
private:
#if __arm64__ //真机
//explicit_atomic 是加了原子性的保护
explicit_atomic _imp;
explicit_atomic _sel;
#else //非真机
explicit_atomic _sel;
explicit_atomic _imp;
#endif
//方法等其他部分省略
}
分为两个版本,真机 和 非真机,不同的区别在于sel 和 imp的顺序不一致
通过上面两个结构体源码可知,cache中缓存的是sel-imp
cache_t缓存机制
初步了解了cache_t的内部结构,现在我们来探索cache_t的缓存机制
step1: 新建一个LBHPerson类,定义如下的属性、方法及其实现
//.h
@interface LBHPerson : NSObject
@property (nonatomic, copy) NSString *name;
@property (nonatomic, copy) NSString *nickName;
- (void)instanceMethod1;
- (void)instanceMethod2;
- (void)instanceMethod3;
- (void)instanceMethod4;
- (void)instanceMethod5;
+ (void)classMethod;
@end
//.m
@implementation LBHPerson
- (void)instanceMethod1
{
NSLog(@"%s",__func__);
}
- (void)instanceMethod2
{
NSLog(@"%s",__func__);
}
- (void)instanceMethod3
{
NSLog(@"%s",__func__);
}
- (void)instanceMethod4
{
NSLog(@"%s",__func__);
}
- (void)instanceMethod5
{
NSLog(@"%s",__func__);
}
+ (void)classMethod
{
NSLog(@"%s",__func__);
}
@end
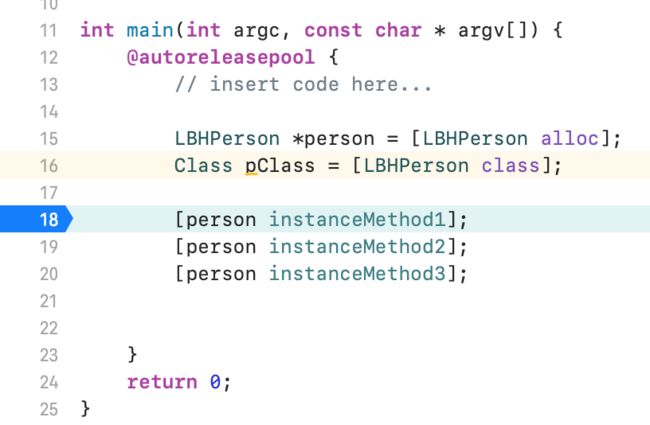
step2: 在main函数中实例化LBHPerson类,并调用其中的3个实例方法,在person调用第一个方法处加一个断点,如图:
step3: lldb调试--在没有执行任何方法
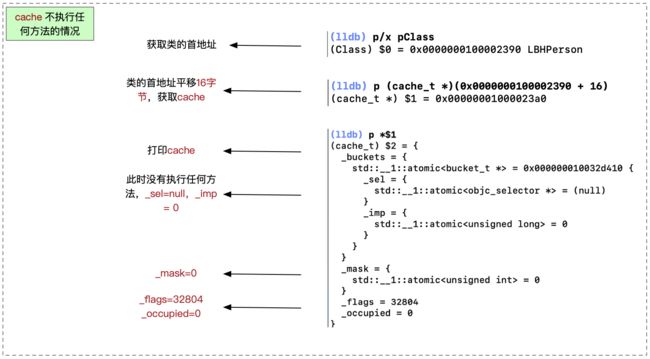
* cache属性的获取,需要通过pclass的首地址平移16字节
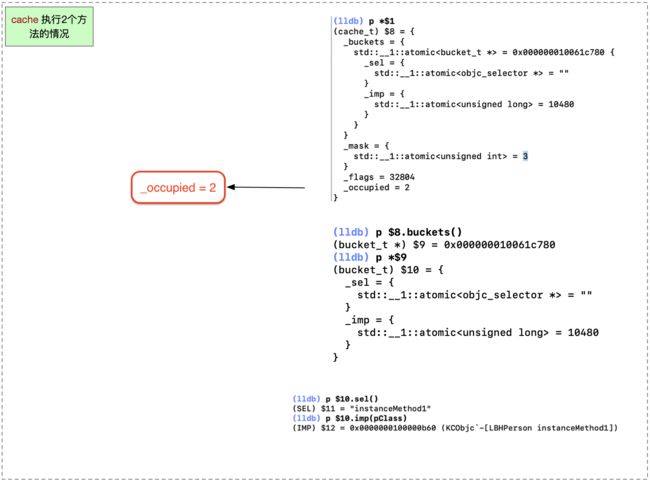
step4: 点击step over,程序执行一步,此时-[LBHPerson instanceMethod1]已经执行,我们再看下此时cache的情况
* 从源码的分析中,我们知道sel-imp是在cache_t的_buckets属性(目前处于macOS环境),而在cache_t结构体中提供了获取_buckets属性的方法buckets()
* bucket_t结构体提供了获取sel属性的方法sel()和获取imp属性的方法imp(cls)
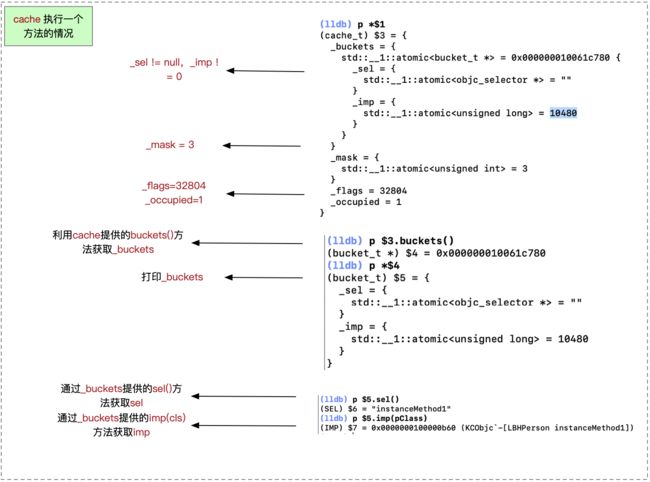
从lldb打印结果来看,sel、imp、mask、occupied等值出现了变化,由上图可知,在没有执行方法调用时,此时的cache是没有缓存的,执行了一次方法调用,cache中就有了一个缓存,即调用一次方法就会缓存一次方法。
我们现在了解了如何获取cache中sel-imp,如何验证打印的sel和imp就是我们调用的呢?
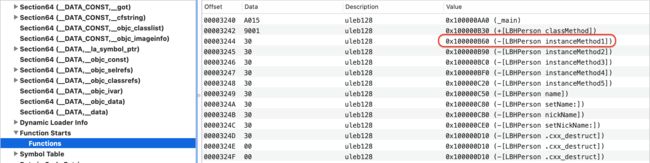
在machoView工具打开target的可执行文件,在方法列表中查看其imp的值是否是一致的,如果一致,说明打印的这个sel-imp就是LBHPerson的实例方法
step5: 点击step over,程序再执行一步,此时-[LBHPerson instanceMethod2]已经执行,我们再看下此时cache的情况
获取到的
buckets同step4中是同一个,如何获取对应的sel和imp?
指针偏移
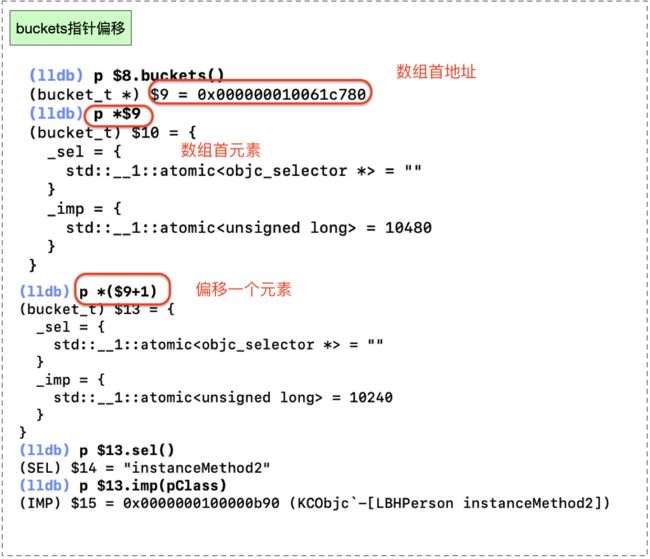
同样通过数组下标也是可以的。
为了更好的研究,我们脱离源码环境在项目中探索
脱离源码
typedef uint32_t mask_t; // x86_64 & arm64 asm are less efficient with 16-bits
struct lg_bucket_t {
SEL _sel;
IMP _imp;
};
struct lg_cache_t {
struct lg_bucket_t * _buckets;
mask_t _mask;
uint16_t _flags;
uint16_t _occupied;
};
struct lg_class_data_bits_t {
uintptr_t bits;
};
struct lg_objc_class {
Class ISA;
Class superclass;
struct lg_cache_t cache; // formerly cache pointer and vtable
struct lg_class_data_bits_t bits; // class_rw_t * plus custom rr/alloc flags
};
int main(int argc, const char * argv[]) {
@autoreleasepool {
// insert code here...
LBHPerson *person = [LBHPerson alloc];
Class pClass = [LBHPerson class];
[person instanceMethod1];
[person instanceMethod2];
[person instanceMethod3];
[person instanceMethod4];
[person instanceMethod5];
struct lg_objc_class *lg_pClass = (__bridge struct lg_objc_class *)(pClass);
NSLog(@"%hu - %u",lg_pClass->cache._occupied,lg_pClass->cache._mask);
for (mask_t i = 0; icache._mask; i++) {
// 打印获取的 bucket
struct lg_bucket_t bucket = lg_pClass->cache._buckets[i];
NSLog(@"%@ - %p",NSStringFromSelector(bucket._sel),bucket._imp);
}
}
return 0;
}
看下输出结果:
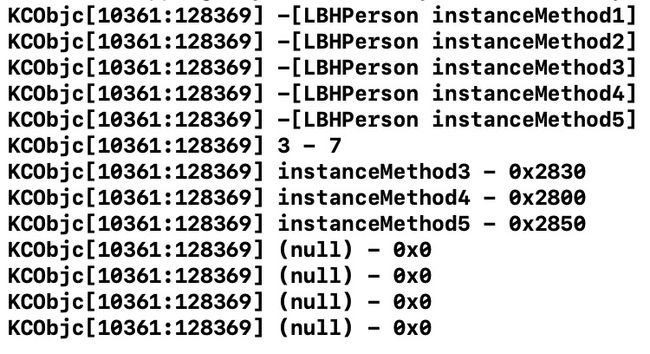
针对上面的打印结果,有以下几点疑问:
1、
_mask是什么?
2、_occupied是什么?
3、occupied和mask随什么变化?
4、bucket数据为什么会有丢失的情况?
5、方法打印顺序不是调用顺序?
带着这些疑问我们对cache_t底层进行进一步的探索
cache_t底层深入探索
step1: 进入cache_t结构体,从cache_t的_occupied属性开始分析
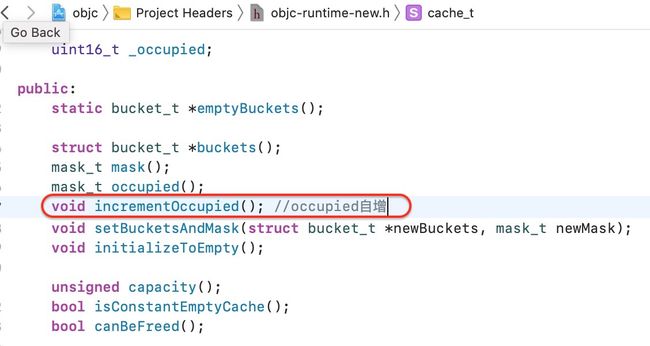
2.1: 看一下incrementOccupied()的实现
void cache_t::incrementOccupied()
{
_occupied++;
}
step2: 在源码中全局搜索incrementOccupied()函数,发现只在cache_t的insert方法有调用
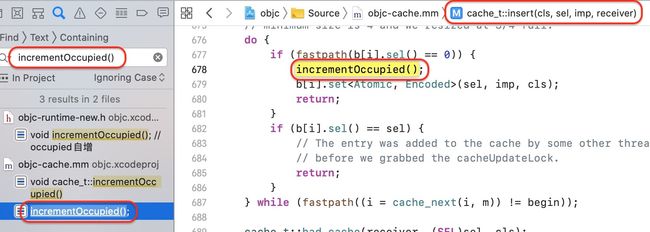
-
insert方法,理解为cache_t的插入,而cache中存储的就是sel-imp,所以cache的原理从insert方法开始分析,以下是cache原理分析的流程图:
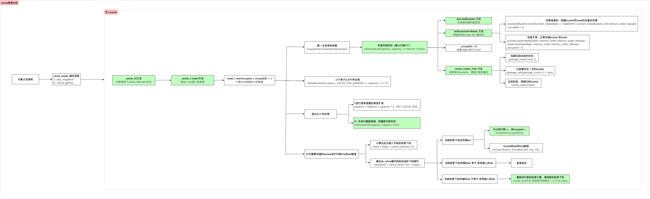
step3: 全局搜索insert(方法,发现只有cache_fill方法中的调用符合

step4: 全局搜索cache_fill,发现在写入之前,还有一步操作,即cache读取,即查找sel-imp,如下所示
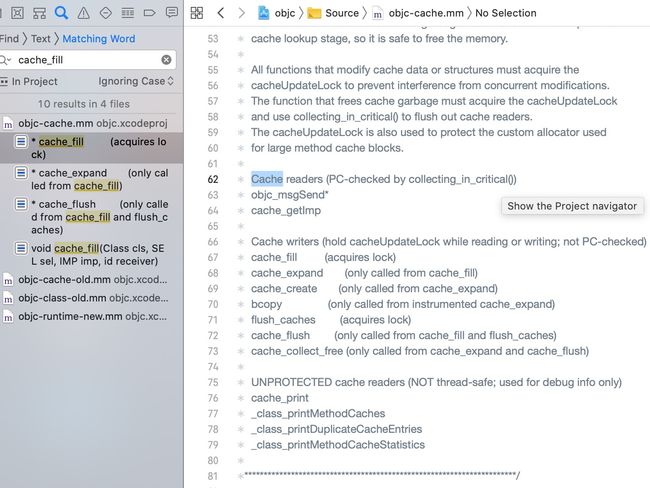
可以看到在cache写入流程前有一个读取流程,我们在下一篇文章讲解读取流程,本文还是回到insert写入上
查看insert源码
void cache_t::insert(Class cls, SEL sel, IMP imp, id receiver)
{
#if CONFIG_USE_CACHE_LOCK
cacheUpdateLock.assertLocked();
#else
runtimeLock.assertLocked();
#endif
ASSERT(sel != 0 && cls->isInitialized());
// 原occupied计数+1
mask_t newOccupied = occupied() + 1;
// 进入查看: return mask() ? mask()+1 : 0;
// 就是当前mask有值就+1,否则设置初始值0
unsigned oldCapacity = capacity(), capacity = oldCapacity;
// 当前缓存是否为空
if (slowpath(isConstantEmptyCache())) {
// Cache is read-only. Replace it.
// 如果为空,就给空间设置初始值4
// (进入INIT_CACHE_SIZE查看,可以发现就是1<<2,就是二进制100,十进制为4)
if (!capacity) capacity = INIT_CACHE_SIZE;
// 创建新空间(第三个入参为false,表示不需要释放旧空间)
reallocate(oldCapacity, capacity, /* freeOld */false);
}
// CACHE_END_MARKER 就是 1
// 如果当前计数+1 < 空间的 3/4。 就不用处理
// 表示空间够用。 不需要空间扩容
else if (fastpath(newOccupied + CACHE_END_MARKER <= capacity / 4 * 3)) {
// Cache is less than 3/4 full. Use it as-is.
}
// 如果计数大于3/4, 就需要进行扩容操作
else {
// 如果空间存在,就2倍扩容。 如果不存在,就设为初始值4
capacity = capacity ? capacity * 2 : INIT_CACHE_SIZE;
// 防止超出最大空间值(2^16 - 1)
if (capacity > MAX_CACHE_SIZE) {
capacity = MAX_CACHE_SIZE;
}
// 创建新空间(第三个入参为true,表示需要释放旧空间)
reallocate(oldCapacity, capacity, true);
}
// 读取现在的buckets数组
bucket_t *b = buckets();
// 新的mask值(当前空间最大存储大小)
mask_t m = capacity - 1;
// 使用hash计算当前函数的位置(内部就是sel & m, 就是取余操作,保障begin值在m当前可用空间内)
mask_t begin = cache_hash(sel, m);
mask_t i = begin;
do {
// 如果当前位置为空(空间位置没被占用)
if (fastpath(b[i].sel() == 0)) {
// Occupied计数+1
incrementOccupied();
// 将sle和imp与cls关联起来并写入内存中
b[i].set(sel, imp, cls);
return;
}
// 如果当前位置有值(位置被占用)
if (b[i].sel() == sel) {
// The entry was added to the cache by some other thread
// before we grabbed the cacheUpdateLock.
// 直接返回
return;
}
// 如果位置有值,再次使用哈希算法找下一个空位置去写入
// 需要注意的是,cache_next内部有分支:
// 如果是arm64真机环境: 从最大空间位置开始,依次-1往回找空位
// 如果是arm旧版真机、x86_64电脑、i386模拟器: 从当前位置开始,依次+1往后找空位。不能超过最大空间。
// 因为当前空间是没超出mask最大空间的,所以一定有空位置可以放置的。
} while (fastpath((i = cache_next(i, m)) != begin));
// 各种错误处理
cache_t::bad_cache(receiver, (SEL)sel, cls);
}
重点分析
这个函数主要分为三部分
* 【第一步】计算出当前的缓存占用量
* 【第二步】根据缓存占用量判断执行的操作
* 【第三步】针对需要存储的bucket进行内部imp和sel赋值
【第一步】根据occupied的值计算出当前的缓存占用量,当属性未赋值及无方法调用时,此时的occupied()为0,而newOccupied为1,如下所示
mask_t newOccupied = occupied() + 1;
//occupied()
mask_t cache_t::occupied()
{
return _occupied;
}
关于缓存占用量的计算,有以下几点说明:
- 当对象已经通过
alloc方法创建,再调用init方法,occupied会+1- 当有
属性赋值时,会隐式调用set方法,occupied也会增加,即有几个属性赋值,occupied就会在原有的基础上加几个- 当有
方法调用时,occupied也会增加,即有几次调用,occupied就会在原有的基础上加几个
capacity()方法
//当前mask有值就+1,否则设置初始值0
unsigned cache_t::capacity()
{
return mask() ? mask()+1 : 0;
}
【第二步】根据缓存占用量判断执行的操作
* 【if】如果是第一次创建,则默认开辟4个
if (slowpath(isConstantEmptyCache())) { //小概率发生的 即当 occupied() = 0时,即创建缓存,创建属于小概率事件
// Cache is read-only. Replace it.
if (!capacity) capacity = INIT_CACHE_SIZE; //初始化时,capacity = 4(1<<2 -- 100)
reallocate(oldCapacity, capacity, /* freeOld */false); //开辟空间
//到目前为止,if的流程的操作都是初始化创建
}
* 【else if】 如果缓存占用量<=3/4,则不作任何处理
// CACHE_END_MARKER 就是 1
// 如果当前计数+1 <= 空间的 3/4。 就不用处理
// 表示空间够用。 不需要空间扩容
else if (fastpath(newOccupied + CACHE_END_MARKER <= capacity / 4 * 3)) {
// Cache is less than 3/4 full. Use it as-is.
}
* 【else】 如果缓存占用量>3/4,则需要进行两倍扩容以及重新开辟空间
else {//如果超出了3/4,则需要扩容(两倍扩容)
//扩容算法: 有cap时,扩容两倍,没有cap就初始化为4
capacity = capacity ? capacity * 2 : INIT_CACHE_SIZE; // 扩容两倍 2*4 = 8
if (capacity > MAX_CACHE_SIZE) {
capacity = MAX_CACHE_SIZE;
}
// 走到这里表示 曾经有,但是已经满了,需要重新梳理
reallocate(oldCapacity, capacity, true);
// 内存 扩容完毕
}
reallocate方法:开辟空间
该方法,在第一次创建以及两倍扩容时,都会使用,其源码实现如图所示
void cache_t::reallocate(mask_t oldCapacity, mask_t newCapacity, bool freeOld)
{
// 读取旧buckets数组
bucket_t *oldBuckets = buckets();
// 创建新空间大小的buckets数组
bucket_t *newBuckets = allocateBuckets(newCapacity);
// Cache's old contents are not propagated.
// This is thought to save cache memory at the cost of extra cache fills.
// fixme re-measure this
// 新空间必须大于0
ASSERT(newCapacity > 0);
// 新空间-1 转为mask_t类型,再与新空间-1 进行判断
ASSERT((uintptr_t)(mask_t)(newCapacity-1) == newCapacity-1);
// 设置新的bucktes数组和mask
// 【重点】我们发现mask就是newCapacity - 1, 表示当前最大可存储空间
setBucketsAndMask(newBuckets, newCapacity - 1);
// 释放旧内存空间
if (freeOld) {
cache_collect_free(oldBuckets, oldCapacity);
}
}
-
reallocate---->allocateBuckets方法:向系统申请开辟内存,即开辟bucket,此时的bucket只是一个临时变量
bucket_t *allocateBuckets(mask_t newCapacity)
{
// 创建1个bucket
bucket_t *newBuckets = (bucket_t *)
calloc(cache_t::bytesForCapacity(newCapacity), 1);
// 将创建的bucket放到当前空间的最尾部,标记数组的结束
bucket_t *end = cache_t::endMarker(newBuckets, newCapacity);
#if __arm__
// End marker's sel is 1 and imp points BEFORE the first bucket.
// This saves an instruction in objc_msgSend.
end->set((SEL)(uintptr_t)1, (IMP)(newBuckets - 1), nil);
#else
// 将结束标记为sel为1,imp为这个buckets
end->set((SEL)(uintptr_t)1, (IMP)newBuckets, nil);
#endif
// 只是打印记录
if (PrintCaches) recordNewCache(newCapacity);
// 返回这个bucket
return newBuckets;
}
-
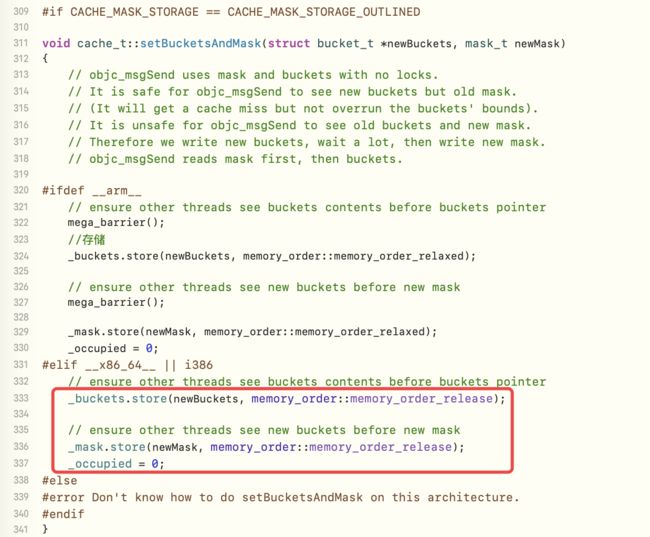
reallocate---->setBucketsAndMask方法:将临时的bucket存入缓存中,此时的存储分为两种情况:-
如果是
真机,根据bucket和mask的位置存储,并将occupied占用设置为0
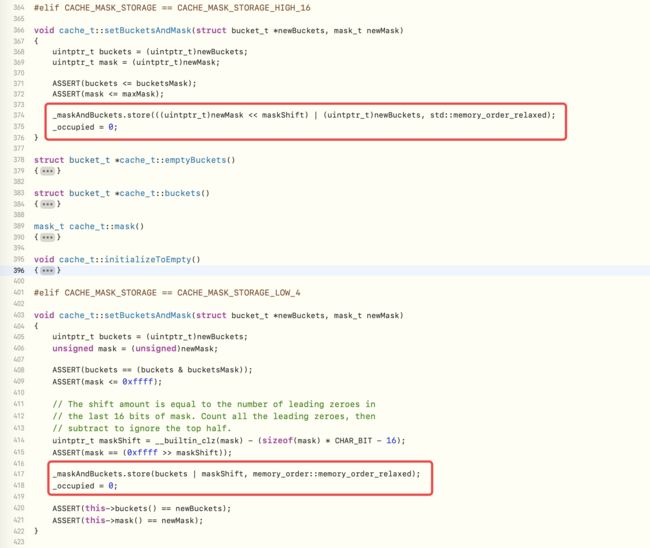
如果
不是真机,正常存储bucket和mask,并将occupied占用设置为0
-
reallocate---->cache_collect_free方法:如果有旧的buckets,需要清理之前的缓存,即调用cache_collect_free方法,源码如下
static void cache_collect_free(bucket_t *data, mask_t capacity)
{
#if CONFIG_USE_CACHE_LOCK
cacheUpdateLock.assertLocked();
#else
runtimeLock.assertLocked();
#endif
if (PrintCaches) recordDeadCache(capacity);
// 垃圾房: 开辟空间 (如果首次,就开辟初始空间,如果不是,就空间*2进行拓展)
_garbage_make_room ();
// 将当前扩容后的capacity加入垃圾房的尺寸中,便于后续释放。
garbage_byte_size += cache_t::bytesForCapacity(capacity);
// 将当前新数据data存放到 garbage_count 后面 这样可以释放前面的,而保留后面的新值
garbage_refs[garbage_count++] = data;
// 不记录之前的缓存 = 【清空之前的缓存】。
cache_collect(false);
}
该方法的实现主要有以下几步:
-
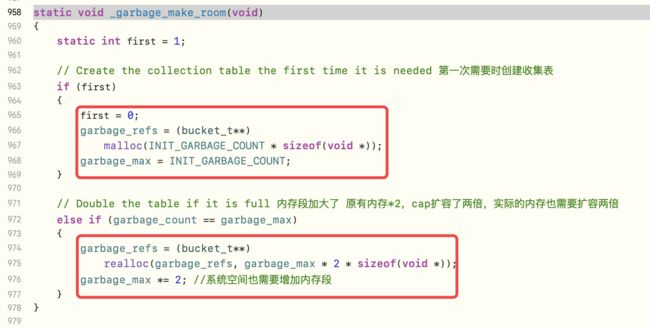
_garbage_make_room方法:创建垃圾回收空间
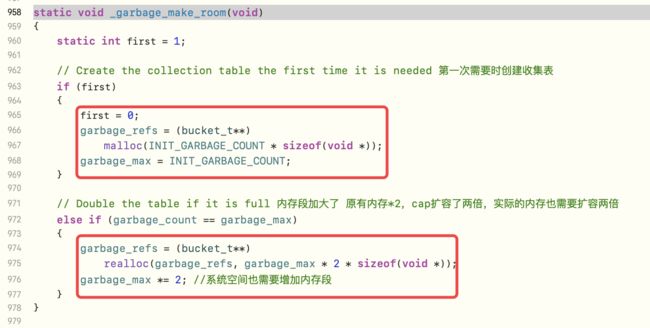
如果是第一次,需要分配回收空间,如果不是第一次,则将内存段加大,即原有内存*2
【第三步】针对需要存储的bucket进行内部imp和sel赋值
这部分主要是根据cache_hash方法,即哈希算法 ,计算sel-imp存储的哈希下标,分为以下三种情况:
1、如果哈希下标的位置未存储sel,即该下标位置获取sel等于0,此时将sel-imp存储进去,并将occupied占用大小加1
2、如果当前哈希下标的位置存储的sel 等于 即将插入的sel,则直接返回
3、如果当前哈希下标的位置存储的sel 不等于 即将插入的sel,则重新经过cache_next方法 即哈希冲突算法,重新进行哈希计算,得到新的下标,再去对比进行存储
其中涉及的两种哈希算法,其源码如下:
-
cache_hash:哈希算法
static inline mask_t cache_hash(SEL sel, mask_t mask)
{
return (mask_t)(uintptr_t)sel & mask; // 通过sel & mask(mask = cap -1)
}
-
cache_next:哈希冲突算法
#if __arm__ || __x86_64__ || __i386__
// objc_msgSend has few registers available.
// Cache scan increments and wraps at special end-marking bucket.
#define CACHE_END_MARKER 1
static inline mask_t cache_next(mask_t i, mask_t mask) {
return (i+1) & mask; //(将当前的哈希下标 +1) & mask,重新进行哈希计算,得到一个新的下标
}
#elif __arm64__
// objc_msgSend has lots of registers available.
// Cache scan decrements. No end marker needed.
#define CACHE_END_MARKER 0
static inline mask_t cache_next(mask_t i, mask_t mask) {
return i ? i-1 : mask; //如果i是空,则为mask,mask = cap -1,如果不为空,则 i-1,向前插入sel-imp
}
疑问解答
1、
_mask是什么?
_mask是指掩码数据,用于在哈希算法或者哈希冲突算法中计算哈希下标,其中mask 等于capacity - 1。
2、
_occupied是什么?
_occupied表示哈希表中 sel-imp 的占用大小 (即可以理解为分配的内存中已经存储了sel-imp的的个数),
3、
occupied和mask随什么变化?
因为在cache初始化时,分配的空间是4个,随着方法调用的增多,当存储的sel-imp个数,即newOccupied + CACHE_END_MARKER(等于1)的和 超过 总容量的3/4,例如有4个时,当occupied等于2时,就需要对cache的内存进行两倍扩容。
4、bucket数据为什么会有丢失的情况?
原因是在扩容时,是将原有的内存全部清除了,再重新申请了内存导致的
5、方法打印顺序不是调用顺序?
因为sel-imp的存储是通过哈希算法计算下标的,其计算的下标有可能已经存储了sel,所以又需要通过哈希冲突算法重新计算哈希下标,所以导致下标是随机的,并不是固定的。