STM32CubeMX学习笔记(33)——FreeRTOS实时操作系统使用(软件定时器)
一、FreeRTOS简介
FreeRTOS 是一个可裁剪、可剥夺型的多任务内核,而且没有任务数限制。FreeRTOS 提供了实时操作系统所需的所有功能,包括资源管理、同步、任务通信等。
FreeRTOS 是用 C 和汇编来写的,其中绝大部分都是用 C 语言编写的,只有极少数的与处理器密切相关的部分代码才是用汇编写的,FreeRTOS 结构简洁,可读性很强!最主要的是非常适合初次接触嵌入式实时操作系统学生、嵌入式系统开发人员和爱好者学习。
最新版本 V9.0.0(2016年),尽管现在 FreeRTOS 的版本已经更新到 V10.4.1 了,但是我们还是选择 V9.0.0,因为内核很稳定,并且网上资料很多,因为 V10.0.0 版本之后是亚马逊收购了FreeRTOS之后才出来的版本,主要添加了一些云端组件,一般采用 V9.0.0 版本足以。
- FreeRTOS官网:http://www.freertos.org/
- 代码托管网站:https://sourceforge.net/projects/freertos/files/FreeRTOS/
二、新建工程
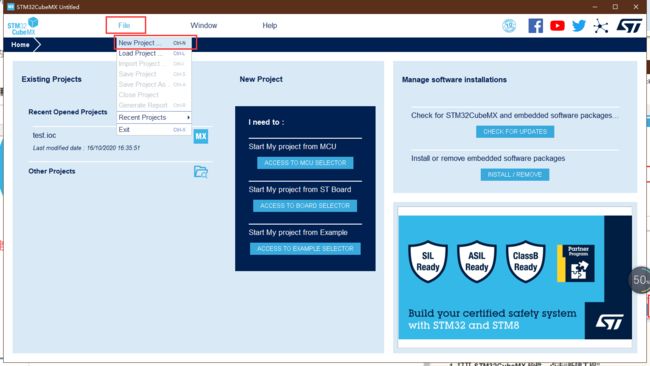
1. 打开 STM32CubeMX 软件,点击“新建工程”
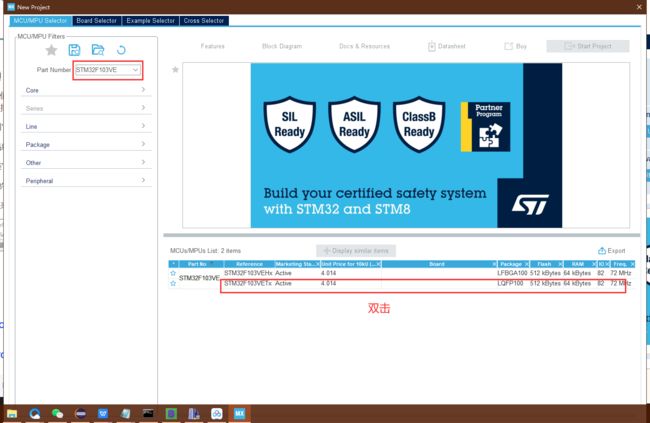
2. 选择 MCU 和封装
3. 配置时钟
RCC 设置,选择 HSE(外部高速时钟) 为 Crystal/Ceramic Resonator(晶振/陶瓷谐振器)

选择 Clock Configuration,配置系统时钟 SYSCLK 为 72MHz
修改 HCLK 的值为 72 后,输入回车,软件会自动修改所有配置

4. 配置调试模式
非常重要的一步,否则会造成第一次烧录程序后续无法识别调试器
SYS 设置,选择 Debug 为 Serial Wire

三、SYS Timebase Source
在 System Core 中选择 SYS ,对 Timebase Source 进行设置,选择 TIM1 作为HAL库的时基(除了 SysTick 外都可以)。

在基于STM32 HAL的项目中,一般需要维护的 “时基” 主要有2个:
- HAL的时基,SYS Timebase Source
- OS的时基(仅在使用OS的情况下才考虑)
而这些 “时基” 该去如何维护,主要分为两种情况考虑:
-
裸机运行:
可以通过SysTick(滴答定时器)或 (TIMx)定时器 的方式来维护SYS Timebase Source,也就是HAL库中的uwTick,这是HAL库中维护的一个全局变量。在裸机运行的情况下,我们一般选择默认的SysTick(滴答定时器) 方式即可,也就是直接放在SysTick_Handler()中断服务函数中来维护。 -
带OS运行:
前面提到的SYS Timebase Source是STM32的HAL库中的新增部分,主要用于实现HAL_Delay()以及作为各种 timeout 的时钟基准。在使用了OS(操作系统)之后,OS的运行也需要一个时钟基准(简称“时基”),来对任务和时间等进行管理。而OS的这个 时基 一般也都是通过
SysTick(滴答定时器) 来维护的,这时就需要考虑 “HAL的时基” 和 “OS的时基” 是否要共用SysTick(滴答定时器) 了。如果共用SysTick,当我们在CubeMX中选择启用FreeRTOS之后,在生成代码时,CubeMX一定会报如下提示:
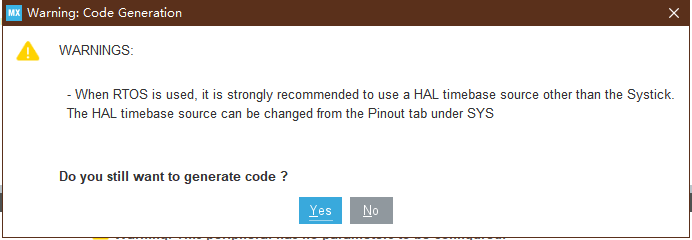
强烈建议用户在使用FreeRTOS的时候,不要使用
SysTick(滴答定时器)作为 “HAL的时基”,因为FreeRTOS要用,最好是要换一个!!!如果共用,潜在一定风险。
四、FreeRTOS
4.1 参数配置
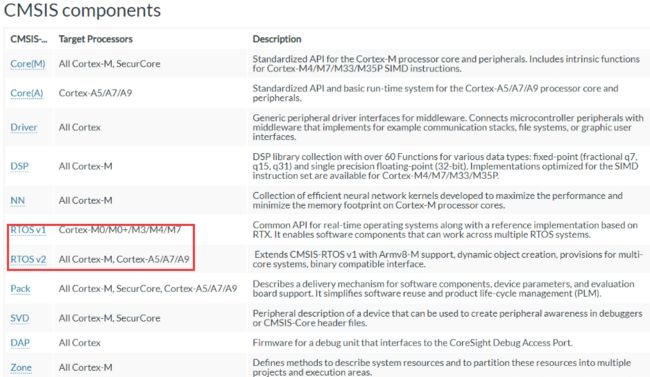
在 Middleware 中选择 FREERTOS 设置,并选择 CMSIS_V1 接口版本
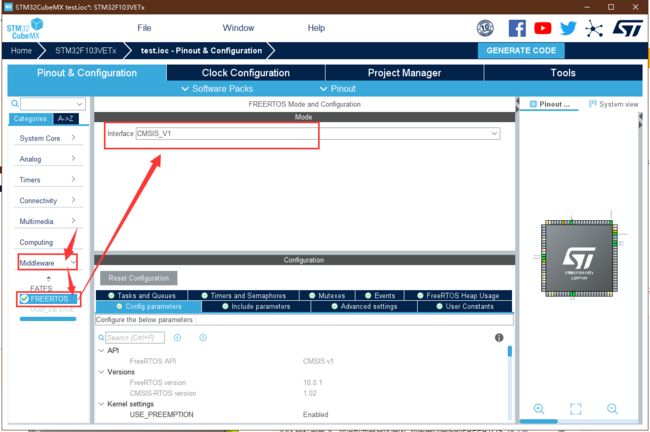
CMSIS是一种接口标准,目的是屏蔽软硬件差异以提高软件的兼容性。RTOS v1使得软件能够在不同的实时操作系统下运行(屏蔽不同RTOS提供的API的差别),而RTOS v2则是拓展了RTOS v1,兼容更多的CPU架构和实时操作系统。因此我们在使用时可以根据实际情况选择,如果学习过程中使用STM32F1、F4等单片机时没必要选择RTOS v2,更高的兼容性背后时更加冗余的代码,理解起来比较困难。
在 Config parameters 进行具体参数配置。
Kernel settings:
- USE_PREEMPTION:
Enabled:RTOS使用抢占式调度器;Disabled:RTOS使用协作式调度器(时间片)。 - TICK_RATE_HZ: 值设置为
1000,即周期就是1ms。RTOS系统节拍中断的频率,单位为HZ。 - MAX_PRIORITIES: 可使用的最大优先级数量。设置好以后任务就可以使用从0到(MAX_PRIORITIES - 1)的优先级,其中0位最低优先级,(MAX_PRIORITIES - 1)为最高优先级。
- MINIMAL_STACK_SIZE: 设置空闲任务的最小任务堆栈大小,以字为单位,而不是字节。如该值设置为
128Words,那么真正的堆栈大小就是 128*4 = 512 Byte。 - MAX_TASK_NAME_LEN: 设置任务名最大长度。
- IDLE_SHOULD_YIELD:
Enabled空闲任务放弃CPU使用权给其他同优先级的用户任务。 - USE_MUTEXES: 为1时使用互斥信号量,相关的API函数会被编译。
- USE_RECURSIVE_MUTEXES: 为1时使用递归互斥信号量,相关的API函数会被编译。
- USE_COUNTING_SEMAPHORES: 为1时启用计数型信号量, 相关的API函数会被编译。
- QUEUE_REGISTRY_SIZE: 设置可以注册的队列和信号量的最大数量,在使用内核调试器查看信号量和队列的时候需要设置此宏,而且要先将消息队列和信号量进行注册,只有注册了的队列和信号量才会在内核调试器中看到,如果不使用内核调试器的话次宏设置为0即可。
- USE_APPLICATION_TASK_TAG: 为1时可以使用vTaskSetApplicationTaskTag函数。
- ENABLE_BACKWARD_COMPATIBILITY: 为1时可以使V8.0.0之前的FreeRTOS用户代码直接升级到V8.0.0之后,而不需要做任何修改。
- USE_PORT_OPTIMISED_TASK_SELECTION: FreeRTOS有两种方法来选择下一个要运行的任务,一个是通用的方法,另外一个是特殊的方法,也就是硬件方法,使用MCU自带的硬件指令来实现。STM32有计算前导零指令吗,所以这里强制置1。
- USE_TICKLESS_IDLE: 置1:使能低功耗tickless模式;置0:保持系统节拍(tick)中断一直运行。假设开启低功耗的话可能会导致下载出现问题,因为程序在睡眠中,可用ISP下载办法解决。
- USE_TASK_NOTIFICATIONS: 为1时使用任务通知功能,相关的API函数会被编译。开启了此功能,每个任务会多消耗8个字节。
- RECORD_STACK_HIGH_ADDRESS: 为1时栈开始地址会被保存到每个任务的TCB中(假如栈是向下生长的)。
Memory management settings:
- Memory Allocation:
Dynamic/Static支持动态/静态内存申请 - TOTAL_HEAP_SIZE: 设置堆大小,如果使用了动态内存管理,FreeRTOS在创建 task, queue, mutex, software timer or semaphore的时候就会使用heap_x.c(x为1~5)中的内存申请函数来申请内存。这些内存就是从堆ucHeap[configTOTAL_HEAP_SIZE]中申请的。
- Memory Management scheme: 内存管理策略
heap_4。
Hook function related definitions:
- USE_IDLE_HOOK: 置1:使用空闲钩子(Idle Hook类似于回调函数);置0:忽略空闲钩子。
- USE_TICK_HOOK: 置1:使用时间片钩子(Tick Hook);置0:忽略时间片钩子。
- USE_MALLOC_FAILED_HOOK: 使用内存申请失败钩子函数。
- CHECK_FOR_STACK_OVERFLOW: 大于0时启用堆栈溢出检测功能,如果使用此功能用户必须提供一个栈溢出钩子函数,如果使用的话此值可以为1或者2,因为有两种栈溢出检测方法。
Run time and task stats gathering related definitions:
- GENERATE_RUN_TIME_STATS: 启用运行时间统计功能。
- USE_TRACE_FACILITY: 启用可视化跟踪调试。
- USE_STATS_FORMATTING_FUNCTIONS: 与宏configUSE_TRACE_FACILITY同时为1时会编译下面3个函数prvWriteNameToBuffer()、vTaskList()、vTaskGetRunTimeStats()。
Co-routine related definitions:
- USE_CO_ROUTINES: 启用协程。
- MAX_CO_ROUTINE_PRIORITIES: 协程的有效优先级数目。
Software timer definitions:
- USE_TIMERS: 启用软件定时器。
Interrupt nesting behaviour configuration:
- LIBRARY_LOWEST_INTERRUPT_PRIORITY: 中断最低优先级。
- LIBRARY_LOWEST_INTERRUPT_PRIORITY: 系统可管理的最高中断优先级。
4.2 创建软件定时器Timer
要想使用软件定时器必须在 Config parameters 中把 USE_TIMERS 选择 Enabled 来使能。

在 Timers and Semaphores 进行配置。
我们创建两个定时器,一个周期定时器,一个单次定时器。


- Timer Name: 定时器名称
- Callback: 回调函数名称
- Type: 定时器类型,
osTimerPeriodic周期定时器,osTimerOnce单次定时器 - Code Generation Option: 代码生成选项
- Parameter: 回调函数形参,不用的时候配置为0或NULL即可
- Allocation: 分配方式:
Dynamic动态内存创建 - Conrol Block Name: 控制块名称
五、UART串口打印
查看 STM32CubeMX学习笔记(6)——USART串口使用
六、生成代码
输入项目名和项目路径
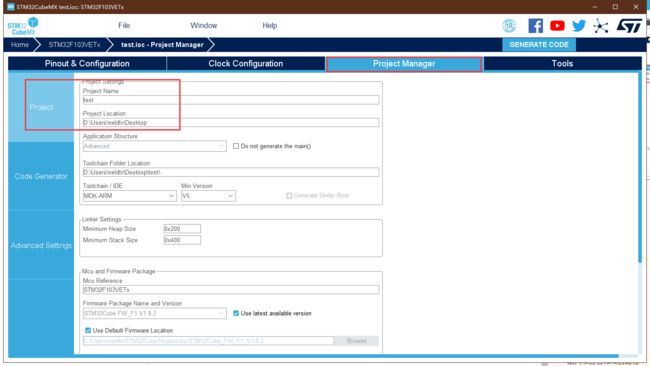
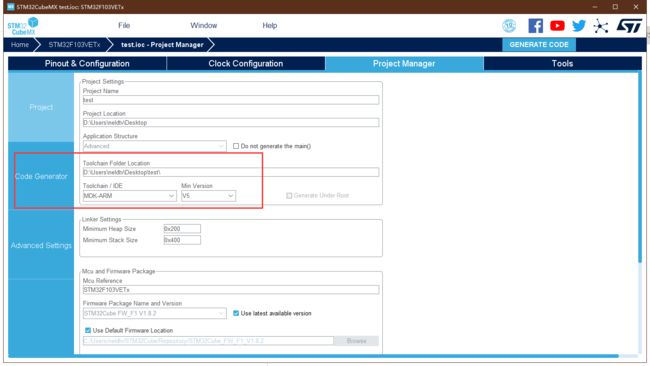
选择应用的 IDE 开发环境 MDK-ARM V5
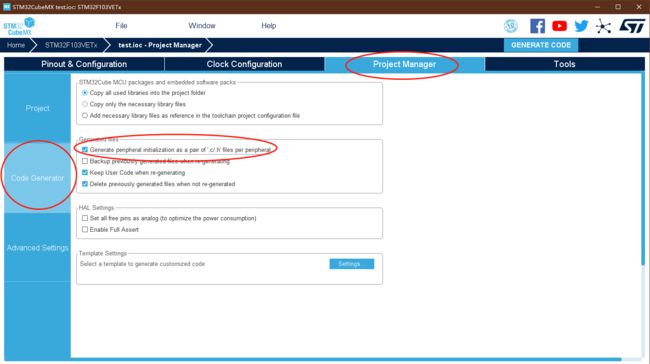
每个外设生成独立的 ’.c/.h’ 文件
不勾:所有初始化代码都生成在 main.c
勾选:初始化代码生成在对应的外设文件。 如 GPIO 初始化代码生成在 gpio.c 中。
点击 GENERATE CODE 生成代码

七、软件定时器
7.1 基本概念
软件定时器在被创建之后,当经过设定的时钟计数值后会触发用户定义的回调函数。 定时精度与系统时钟的周期有关。一般系统利用 SysTick 作为软件定时器的基础时钟,软件定时器的回调函数类似硬件的中断服务函数,所以,回调函数也要快进快出,而且回调函数中不能有任何阻塞任务运行的情况(软件定时器回调函数的上下文环境是任务),比如 vTaskDelay() 以及其它能阻塞任务运行的函数,两次触发回调函数的时间间隔 xTimerPeriodInTicks 叫定时器的定时周期。
FreeRTOS 提供的软件定时器支持单次模式和周期模式,单次模式和周期模式的定时时间到之后都会调用软件定时器的回调函数,用户可以在回调函数中加入要执行的工程代码。
- 单次模式:当用户创建了定时器并启动了定时器后,定时时间到了,只执行一次回调函数之后就将该定时器删除,不再重新执行。
- 周期模式:这个定时器会按照设置的定时时间循环执行回调函数,直到用户将定时器删除。

FreeRTOS 通过一个 prvTimerTask 任务(也叫守护任务 Daemon)管理软定时器,它是在启动调度器时自动创建的,为了满足用户定时需求。prvTimerTask 任务会在其执行期间检查用户启动的时间周期溢出的定时器,并调用其回调函数。只有设置FreeRTOSConfig.h中的宏定义configUSE_TIMERS设置为 1 ,将相关代码编译进来,才能正常使用软件定时器相关功能。
7.2 时间精度
在操作系统中,通常软件定时器以系统节拍周期为计时单位。系统节拍是系统的心跳节拍,表示系统时钟的频率,就类似人的心跳,1s 能跳动多少下,系统节拍配置为 configTICK_RATE_HZ,该宏在 FreeRTOSConfig.h 中有定义,默认是 1000。那么系统的时钟节拍周期就为 1ms(1s 跳动 1000 下,每一下就为 1ms)。软件定时器的所定时数值必须是这个节拍周期的整数倍,例如节拍周期是 10ms,那么上层软件定时器定时数值只能是10ms,20ms,100ms 等,而不能取值为 15ms。由于节拍定义了系统中定时器能够分辨的精确度,系统可以根据实际系统 CPU 的处理能力和实时性需求设置合适的数值,系统节拍周期的值越小,精度越高,但是系统开销也将越大,因为这代表在 1 秒中系统进入时钟中断的次数也就越多。
7.3 注意要点
- 软件定时器的回调函数中应快进快出,绝对不允许使用任何可能引软件定时器起任务挂起或者阻塞的 API 接口,在回调函数中也绝对不允许出现死循环。
- 软件定时器使用了系统的一个队列和一个任务资源,软件定时器任务的优先级默
认为configTIMER_TASK_PRIORITY,为了更好响应,该优先级应设置为所有任务中最高的优先级。 - 创建单次软件定时器,该定时器超时执行完回调函数后,系统会自动删除该软件定时器,并回收资源。
- 定时器任务的堆栈大小默认为
configTIMER_TASK_STACK_DEPTH个字节。
八、相关API说明
8.1 osTimerCreate
创建一个软件定时器,并返回一个定时器ID。
| 函数 | osTimerId osTimerCreate (const osTimerDef_t *timer_def, os_timer_type type, void *argument) |
|---|---|
| 参数 | timer_def: 引用由osTimerDef定义的定时器 type: 设置为 osTimerPeriodic,那么软件定时器的工作模式就是周期模式, 一直会以用户指定的 xTimerPeriod 周期去执行回调函数。如果设置为 osTimerOnce,那么软件定时器就在用户指定的 xTimerPeriod 周期下运行一次后就进入休眠态 argument: 回调函数传入形参 |
| 返回值 | 成功返回定时器ID,失败返回0 |
8.2 osTimerStart
启动软件定时器。该函数可以在中断中使用。
| 函数 | osStatus osTimerStart (osTimerId timer_id, uint32_t millisec) |
|---|---|
| 参数 | timer_id: 定时器ID millisec: 用户指定的超时时间,单位为系统节拍周期(即 tick),如果在 FreeRTOS 调度器开启之前调用 osTimerStart(),该形参将不起作用 |
| 返回值 | 错误码 |
8.3 osTimerStop
停止一个软件定时器,让其进入休眠态。该函数可以在中断中使用。
| 函数 | osStatus osTimerStop (osTimerId timer_id) |
|---|---|
| 参数 | timer_id: 定时器ID |
| 返回值 | 错误码 |
8.4 osTimerDelete
用于删除一个已经被创建成功的软件定时器,删除之后就无法使用该定时器,并且定时器相应的资源也会被系统回收释放。
| 函数 | osStatus osTimerDelete (osTimerId timer_id) |
|---|---|
| 参数 | timer_id: 定时器ID |
| 返回值 | 错误码 |
九、示例
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "cmsis_os.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include 查看打印:

十、工程代码
链接:https://pan.baidu.com/s/1n9Qn1atCu_HCaWInX6b0GA 提取码:1kar
十一、注意事项
用户代码要加在 USER CODE BEGIN N 和 USER CODE END N 之间,否则下次使用 STM32CubeMX 重新生成代码后,会被删除。

• 由 Leung 写于 2022 年 1 月 4 日
• 参考:STM32CubeMX FreeRTOS软件定时器实验
STM32CubeIDE(十一):FreeRTOS选项中Disable、CMSIS_V1和CMSIS_V2的区别
HAL库中的 SYS Timebase Source 和 SysTick_Handler()