pytorch实现 | Deformable Convolutional Networks | CVPR | 2017
文章转载自微信公众号:【机器学习炼丹术】,请支持原创。
这一篇文章,来讲解一下可变卷积的代码实现逻辑和可视化效果。全部基于python,没有C++。大部分代码来自:https://github.com/oeway/pytorch-deform-conv 但是我研究了挺久的,发现这个人的代码中存在一些问题,导致可变卷积并没有实现。之所以发现这个问题是在我可视化可变卷积的检测点的时候,发现一些端倪,然后经过修改之后,可以正常可视化,并且精度有所提升。
1 代码逻辑
# 为了可视化
class ConvOffset2D(nn.Conv2d):
"""ConvOffset2D
Convolutional layer responsible for learning the 2D offsets and output the
deformed feature map using bilinear interpolation
Note that this layer does not perform convolution on the deformed feature
map. See get_deform_cnn in cnn.py for usage
"""
def __init__(self, filters, init_normal_stddev=0.01, **kwargs):
"""Init
Parameters
----------
filters : int
Number of channel of the input feature map
init_normal_stddev : float
Normal kernel initialization
**kwargs:
Pass to superclass. See Con2d layer in pytorch
"""
self.filters = filters
self._grid_param = None
super(ConvOffset2D, self).__init__(self.filters, self.filters*2, 3, padding=1, bias=False, **kwargs)
self.weight.data.copy_(self._init_weights(self.weight, init_normal_stddev))
def forward(self, x):
"""Return the deformed featured map"""
x_shape = x.size()
offsets_ = super(ConvOffset2D, self).forward(x)
# offsets: (b*c, h, w, 2)
# 这个self._to_bc_h_w_2就是我修改的代码
offsets = self._to_bc_h_w_2(offsets_, x_shape)
# x: (b*c, h, w)
x = self._to_bc_h_w(x, x_shape)
# X_offset: (b*c, h, w)
x_offset = th_batch_map_offsets(x, offsets, grid=self._get_grid(self,x))
# x_offset: (b, h, w, c)
x_offset = self._to_b_c_h_w(x_offset, x_shape)
return x_offset,offsets_
假设我们现在要对5通道的28x28的特征图进行可变卷积的offset的计算。
-
offsets_ = super(ConvOffset2D, self).forward(x)
现在offsets_是一个10通道的28x28的特征图。 -
offsets = self._to_bc_h_w_2(offsets_, x_shape)
调用这个函数特征图从(b,2c, h, w)变成(bxc, h, w, 2)的结构 -
x = self._to_bc_h_w(x, x_shape)
改变原来特征图的结构,变成(bxc,h,w) -
x_offset = th_batch_map_offsets(x, offsets, grid=self._get_grid(self,x))
这个相当于把之前的偏移offsets施加到了特征图x上 -
x_offset = self._to_b_c_h_w(x_offset, x_shape)
把施加偏移之后的特征图恢复成(b,c,h,w)的结构
可以看到,关键就是如何把offset施加到x上这个步骤。
def th_batch_map_offsets(input, offsets, grid=None, order=1):
"""Batch map offsets into input
Parameters
---------
input : torch.Tensor. shape = (b, s, s)
offsets: torch.Tensor. shape = (b, s, s, 2)
Returns
-------
torch.Tensor. shape = (b, s, s)
"""
batch_size = input.size(0)
input_height = input.size(1)
input_width = input.size(2)
offsets = offsets.view(batch_size, -1, 2)
if grid is None:
grid = th_generate_grid(batch_size, input_height, input_width, offsets.data.type(), offsets.data.is_cuda)
coords = offsets + grid
mapped_vals = th_batch_map_coordinates(input, coords)
return mapped_vals
-
offsets = offsets.view(batch_size, -1, 2)
offsets之前被改造成了(bxc,h,w,2)的样子,现在再改成(b,cxhxw,2)的样子 -
coords = offsets + grid
这个感觉是offsets+grid,grid类似于像素的xy轴,offsets是一个相对偏移,这样offset+grid就变成了偏移之后的绝对坐标,可以直接从特征图中定位到对应的元素。因为像素值的xy轴肯定为整数,因为这个偏移是小数,所以在特征图中定位到一个小数坐标的元素是通过双线性差值的方法获取到这个不存在位置的像素值的。 -
mapped_vals = th_batch_map_coordinates(input, coords)
这部分的内容是把offset施加到原特征图中
差不多逻辑就是这么个逻辑
2 结果展示
先看使用了不使用可变卷积的结果:

这种MNIST数字识别任务已经是幼儿园级别的了,所以成功率基本是非常高的:
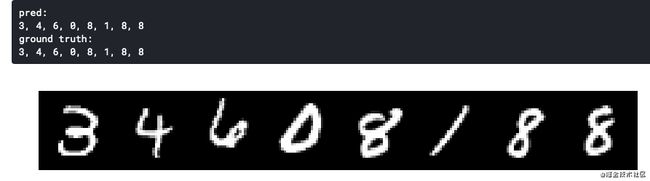
在看使用了可变卷积的结果:

可以发现,最终的loss下降其实并比不过不用可变卷积的效果,至于原因我也不确定,也许是任务太简单了?我想到一点,也许是可变卷积的目的是对目标的纹理等更敏感,对于MNIST的分类问题反而起不到效果。
最后我也搞出来这样的一张图,我在费尽千辛万苦之后,终于实现的可变卷积的可视化效果:
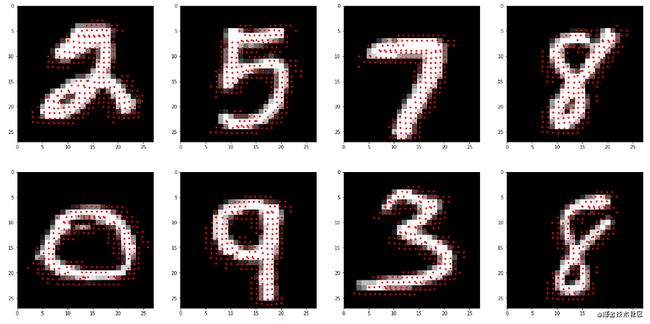
可以看到,可变卷积对于数字部分的反应大一些,检测点在数字部分会有更大的偏移。不过可变卷积在我测试的过程中,这个偏移的大小不确定,这一次训练模型可能偏移很大,下一次训练可能偏移很小,似乎增加了网络训练的难度。大概就这么多把。(也不确定是不是自己代码的问题了。。)
3 完整代码
class ConvOffset2D(nn.Conv2d):
"""ConvOffset2D
Convolutional layer responsible for learning the 2D offsets and output the
deformed feature map using bilinear interpolation
Note that this layer does not perform convolution on the deformed feature
map. See get_deform_cnn in cnn.py for usage
"""
def __init__(self, filters, init_normal_stddev=0.01, **kwargs):
"""Init
Parameters
----------
filters : int
Number of channel of the input feature map
init_normal_stddev : float
Normal kernel initialization
**kwargs:
Pass to superclass. See Con2d layer in pytorch
"""
self.filters = filters
self._grid_param = None
super(ConvOffset2D, self).__init__(self.filters, self.filters*2, 3, padding=1, bias=False, **kwargs)
self.weight.data.copy_(self._init_weights(self.weight, init_normal_stddev))
def forward(self, x):
"""Return the deformed featured map"""
x_shape = x.size()
offsets = super(ConvOffset2D, self).forward(x)
# offsets: (b*c, h, w, 2)
offsets = self._to_bc_h_w_2(offsets, x_shape)
# x: (b*c, h, w)
x = self._to_bc_h_w(x, x_shape)
# X_offset: (b*c, h, w)
x_offset = th_batch_map_offsets(x, offsets, grid=self._get_grid(self,x))
# x_offset: (b, h, w, c)
x_offset = self._to_b_c_h_w(x_offset, x_shape)
return x_offset
@staticmethod
def _get_grid(self, x):
batch_size, input_height, input_width = x.size(0), x.size(1), x.size(2)
dtype, cuda = x.data.type(), x.data.is_cuda
if self._grid_param == (batch_size, input_height, input_width, dtype, cuda):
return self._grid
self._grid_param = (batch_size, input_height, input_width, dtype, cuda)
self._grid = th_generate_grid(batch_size, input_height, input_width, dtype, cuda)
return self._grid
@staticmethod
def _init_weights(weights, std):
fan_out = weights.size(0)
fan_in = weights.size(1) * weights.size(2) * weights.size(3)
w = np.random.normal(0.0, std, (fan_out, fan_in))
return torch.from_numpy(w.reshape(weights.size()))
@staticmethod
def _to_bc_h_w_2(x, x_shape):
"""(b, 2c, h, w) -> (b*c, h, w, 2)"""
x = x.contiguous().view(-1, int(x_shape[2]), int(x_shape[3]), 2)
return x
@staticmethod
def _to_bc_h_w(x, x_shape):
"""(b, c, h, w) -> (b*c, h, w)"""
x = x.contiguous().view(-1, int(x_shape[2]), int(x_shape[3]))
return x
@staticmethod
def _to_b_c_h_w(x, x_shape):
"""(b*c, h, w) -> (b, c, h, w)"""
x = x.contiguous().view(-1, int(x_shape[1]), int(x_shape[2]), int(x_shape[3]))
return x
def th_generate_grid(batch_size, input_height, input_width, dtype, cuda):
grid = np.meshgrid(
range(input_height), range(input_width), indexing='ij'
)
grid = np.stack(grid, axis=-1)
grid = grid.reshape(-1, 2)
grid = np_repeat_2d(grid, batch_size)
grid = torch.from_numpy(grid).type(dtype)
if cuda:
grid = grid.cuda()
return Variable(grid, requires_grad=False)
def th_batch_map_offsets(input, offsets, grid=None, order=1):
"""Batch map offsets into input
Parameters
---------
input : torch.Tensor. shape = (b, s, s)
offsets: torch.Tensor. shape = (b, s, s, 2)
Returns
-------
torch.Tensor. shape = (b, s, s)
"""
batch_size = input.size(0)
input_height = input.size(1)
input_width = input.size(2)
offsets = offsets.view(batch_size, -1, 2)
if grid is None:
grid = th_generate_grid(batch_size, input_height, input_width, offsets.data.type(), offsets.data.is_cuda)
coords = offsets + grid
mapped_vals = th_batch_map_coordinates(input, coords)
return mapped_vals
def np_repeat_2d(a, repeats):
"""Tensorflow version of np.repeat for 2D"""
assert len(a.shape) == 2
a = np.expand_dims(a, 0)
a = np.tile(a, [repeats, 1, 1])
return a
def th_batch_map_coordinates(input, coords, order=1):
"""Batch version of th_map_coordinates
Only supports 2D feature maps
Parameters
----------
input : tf.Tensor. shape = (b, s, s)
coords : tf.Tensor. shape = (b, n_points, 2)
Returns
-------
tf.Tensor. shape = (b, s, s)
"""
batch_size = input.size(0)
input_height = input.size(1)
input_width = input.size(2)
n_coords = coords.size(1)
# coords = torch.clamp(coords, 0, input_size - 1)
coords = torch.cat((torch.clamp(coords.narrow(2, 0, 1), 0, input_height - 1), torch.clamp(coords.narrow(2, 1, 1), 0, input_width - 1)), 2)
assert (coords.size(1) == n_coords)
coords_lt = coords.floor().long()
coords_rb = coords.ceil().long()
coords_lb = torch.stack([coords_lt[..., 0], coords_rb[..., 1]], 2)
coords_rt = torch.stack([coords_rb[..., 0], coords_lt[..., 1]], 2)
idx = th_repeat(torch.arange(0, batch_size), n_coords).long()
idx = Variable(idx, requires_grad=False)
if input.is_cuda:
idx = idx.cuda()
def _get_vals_by_coords(input, coords):
indices = torch.stack([
idx, th_flatten(coords[..., 0]), th_flatten(coords[..., 1])
], 1)
inds = indices[:, 0]*input.size(1)*input.size(2)+ indices[:, 1]*input.size(2) + indices[:, 2]
vals = th_flatten(input).index_select(0, inds)
vals = vals.view(batch_size, n_coords)
return vals
vals_lt = _get_vals_by_coords(input, coords_lt.detach())
vals_rb = _get_vals_by_coords(input, coords_rb.detach())
vals_lb = _get_vals_by_coords(input, coords_lb.detach())
vals_rt = _get_vals_by_coords(input, coords_rt.detach())
coords_offset_lt = coords - coords_lt.type(coords.data.type())
vals_t = coords_offset_lt[..., 0]*(vals_rt - vals_lt) + vals_lt
vals_b = coords_offset_lt[..., 0]*(vals_rb - vals_lb) + vals_lb
mapped_vals = coords_offset_lt[..., 1]* (vals_b - vals_t) + vals_t
return mapped_vals
def th_repeat(a, repeats, axis=0):
"""Torch version of np.repeat for 1D"""
assert len(a.size()) == 1
return th_flatten(torch.transpose(a.repeat(repeats, 1), 0, 1))
def th_flatten(a):
"""Flatten tensor"""
return a.contiguous().view(a.nelement())