docker入门(八):docker镜像加载原理
文章目录
-
- 1、镜像是什么
- 2、Docker镜像获取的方式
- 3、Docker镜像加载原理
-
- (1)UnionFS(联合文件系统)
- (2)Docker镜像加载原理
- 4. 镜像分层理解
-
- (1)docker分层的镜像
- (2) 加深理解
1、镜像是什么
镜像是一种轻量级、可执行的独立软件包,用来打包软件运行环境和基于运行环境开发的软件,它包含运行某个软件所需的所有内容,包括代码、运行时环境、库、环境变量和配置文件。
即:所有的应用,直接打包成Docker镜像,就可以直接跑起来!
2、Docker镜像获取的方式
从仓库中拉取镜像(docker pull)。
从本地文件中载入镜像(docker load)。
由容器生成新的镜像(docker commit)。
自己构建新的镜像(docker build)。
3、Docker镜像加载原理
(1)UnionFS(联合文件系统)
- Union文件系统(UnionFS)是一种分层、轻量级并且高性能的文件系统,它支持对文件系统的修改作为一次提交,来一层层的叠加。
- 同时可以将不同目录,挂载到同一个虚拟文件系统下(unite several directories into a single virtual filesystem)。
- Union文件系统是Docker镜像的基础。
- 镜像可以通过分层来进行继承,基于基础镜像(没有父镜像概念),可以制作各种具体的应用镜像。
总结:一次同时加载多个文件系统,但从外面看起来,只能看到一个文件系统,联合加载会把各层文件系统叠加起来,这样最终的文件系统会包含所有底层的文件和目录。
我们下载镜像的时候,看到的一层层就是这个,如下:
[root@192 /]# docker pull redis
Using default tag: latest
latest: Pulling from library/redis
a076a628af6f: Already exists # 本地种已存在基础镜像
f40dd07fe7be: Pull complete # 一层一层下载
ce21c8a3dbee: Pull complete # 一层一层叠加
ee99c35818f8: Pull complete
56b9a72e68ff: Pull complete
3f703e7f380f: Pull complete
Digest: sha256:0f97c1c9daf5b69b93390ccbe8d3e2971617ec4801fd0882c72bf7cad3a13494
Status: Downloaded newer image for redis:latest
docker.io/library/redis:latest
(2)Docker镜像加载原理
Docker的镜像实际上由一层一层的文件系统组成,这种层级的文件系统UnionFS(联合文件系统)。
分为两个部分:
-
bootfs(boot file system):主要包含bootloader和kernel(Linux内核),bootloader主要是引导加载kernel,Linux刚启动时会加载bootfs文件系统,而在Docker镜像的最底层也是bootfs这一层,这与我们典型的Linux/Unix系统是一样的,包含boot加载器和内核。当boot加载完成之后,整个内核就都在内存中了,此时内存的使用权已由bootfs转交给内核,此时系统也会卸载bootfs。
即:系统启动时需要的引导加载,这个过程会需要一定时间。就是黑屏到开机之间的这么一个过程。电脑、虚拟机、Docker容器启动都需要的过程。在说回镜像,所以这一部分,无论是什么镜像都是公用的。
-
rootfs(root file system):rootfs在bootfs之上。包含的就是典型Linux系统中的/dev,/proc,/bin,/etc等标准目录和文件。rootfs就是各种不同的操作系统发行版,比如Ubuntu,Centos等等。
即:镜像启动之后的一个小的底层系统,这就是我们之前所说的,容器就是一个小的虚拟机环境,比如Ubuntu,Centos等,这个小的虚拟机环境就相当于rootfs。

平时我们安装进虚拟机的CentOS系统都是好几个G,为什么Docker这里才200M?
[root@192 /]# docker images
REPOSITORY TAG IMAGE ID CREATED SIZE
centos latest 300e315adb2f 3 months ago 209MB
对于一个精简的OS系统,rootfs可以很小,只需要包含最基本的命令、工具和程序库就可以了,因为底层直接用Host(宿主机)的kernel(也就是宿主机或者服务器的boosfs+内核),自己只需要提供rootfs就可以了。
由此可见对于不同的linux发行版,bootfs基本是一致的,rootfs会有差别,因此不同的发行版可以公用bootfs部分。
这就是我们之前说:虚拟机的启动是分钟级的,容器的启动是秒级的
4. 镜像分层理解
(1)docker分层的镜像

多个镜像都是从相同的base镜像构建的,宿主机只需要在磁盘上保留一份Base镜像,同时内存中也只需要加载一份Base镜像,就可以应用在所有的容器服务之中了。而且镜像的每一层都可以被共享
使用 docker image inspect可以查看镜像元数据
[root@192 /]# docker image inspect redis:latest
[
{
"Id": "sha256:621ceef7494adfcbe0e523593639f6625795cc0dc91a750629367a8c7b3ccebb",
"RepoTags": [
"redis:latest"
],
... # 省略
... # 省略
"RootFS": {
"Type": "layers",
"Layers": [
"sha256:cb42413394c4059335228c137fe884ff3ab8946a014014309676c25e3ac86864",
"sha256:8e14cb7841faede6e42ab797f915c329c22f3b39026f8338c4c75de26e5d4e82",
"sha256:1450b8f0019c829e638ab5c1f3c2674d117517669e41dd2d0409a668e0807e96",
"sha256:f927192cc30cb53065dc266f78ff12dc06651d6eb84088e82be2d98ac47d42a0",
"sha256:a24a292d018421783c491bc72f6601908cb844b17427bac92f0a22f5fd809665",
"sha256:3480f9cdd491225670e9899786128ffe47054b0a5d54c48f6b10623d2f340632"
]
},
... # 省略
}
]
(2) 加深理解
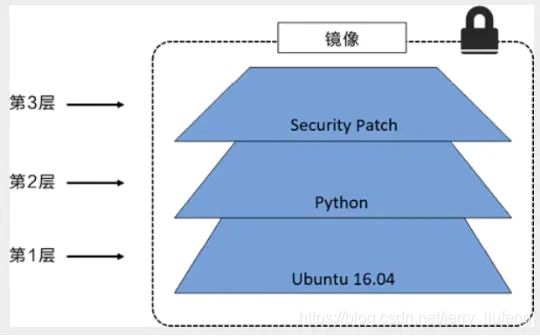
所有的Docker镜像都起始于一个基础镜像层,当进行修改或增加新的内容时,就会在当前镜像层之上,创建新的镜像层。
举一个简单的例子,假如基于Ubuntu Linux 16.04创建一个新的镜像,这就是新镜像的第一层;如果在该镜像中添加Python包,就会在基础镜像层之上创建第二个镜像层;如果继续添加一个安全补丁,就会创建第三个镜像层。
该镜像当前已经包含3个镜像层,如下图所示(这只是一个用于演示的很简单的例子)。
在添加额外的镜像层的同时,镜像始终保持是当前所有镜像的组合,理解这一点非常重要。下图中举了一个简单的例子,每个镜像层包含3个文件,而整体的镜像包含了来自两个镜像层的6个文件。
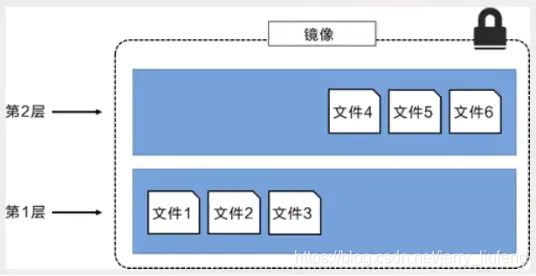
上图中的鏡像层跟之前图中的略有区别,主要目的是便于展示文件。
下图中展示了一个稍微复杂的三层镜像,在外部看来整个镜像只有6个文件,这是因为最上层中的文件7是文件5的一个更新版本。

这种情况下,上层镜像层中的文件覆盖了底层镜像层中的文件。这样就使得文件的更新版本作为一个新镜像层添加到镜像当中。
Docker通过存储引擎(新版本采用快照机制)的方式来实现镜像层堆栈,并保证多镜像层对外展示为统一的文件系统。
如上边的三层镜像,Docker最终会把所有镜像层堆叠并合并,对外提供统一的视图,如下图

参考:
[1] 【现学现忘Docker基础】— 18.Docker镜像的加载原理