yolov5-realsense深度信息目标检测(构建自己的数据集模型)
yolov5-realsense深度信息目标检测(构建自己的数据集模型)
训练准备:
1.安装运行yolov5代码
略
2.制作训练数据集
目标训练数据集,应大于50张图片以上
(1)使用OpenCV拍摄640X480(32倍数)(相机尺寸)的图片并保存
import cv2
cap=cv2.VideoCapture(0)
width = 640 #定义摄像头获取图像宽度
height = 480 #定义摄像头获取图像长度
cap.set(cv2.CAP_PROP_FRAME_WIDTH, width) #设置宽度
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, height) #设置长度
i=0
while(1):
ret ,frame = cap.read()
k=cv2.waitKey(1)
if k==27:
break
elif k==ord('s'):
cv2.imwrite('/home/user/cxking/project/yolo/yolov5训练数据及/img/'+str(i)+'.jpg',frame)
i+=1
cv2.imshow("capture", frame)
cap.release()
cv2.destroyAllWindows()
选取等宽高图片:
square (w==h)
如 输入为 [b, c, 640, 640], 可以使用mosic数据增强方式增强图像
rect(scale):
如 输入为 [b, c, 640, 512], 其中512为短边放缩以后的尺寸(补充到32的倍数)
但是不支持mosic数据增强方式
32倍数:
yolov5s第一层结构FOCUS切片操作最后使用了32个卷积核的卷积操作
数据集展示:
(2)安装图片标注工具LabelImg
# https://github.com/tzutalin/labelImg
pip3 install labelImg
labelImg
labelImg [IMAGE_PATH] [PRE-DEFINED CLASS FILE]
操作快捷键:
Ctrl + u 加载目录中的所有图像,鼠标点击Open dir同功能
Ctrl + r 更改默认注释目标目录(xml文件保存的地址)
Ctrl + s 保存
Ctrl + d 复制当前标签和矩形框
space 将当前图像标记为已验证
w 创建一个矩形框
d 下一张图片
a 上一张图片
del 删除选定的矩形框
Ctrl++ 放大
Ctrl-- 缩小
↑→↓← 键盘箭头移动选定的矩形框
标注操作:
生成图片 xlm 文件:

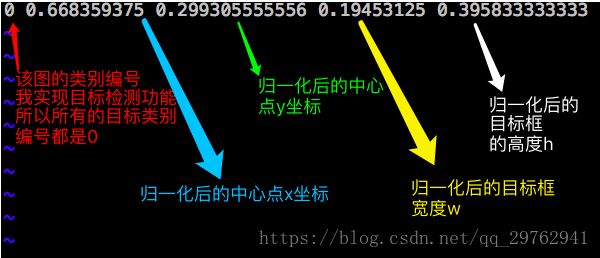
标签解析:
<annotation> ##Annotations:里面存放的是每张图片打完标签所对应的XML文件
<folder>all_imagesfolder>
<filename>0.jpgfilename> ##图片名
<path>/home/user/cxking/project/yolo/yolov5/mytrain/all_images/0.jpgpath>
<source>
<database>Unknowndatabase>
source>
<size> ##图片尺寸
<width>640width>
<height>480height>
<depth>3depth> #RGB3色
size>
<segmented>0segmented>
<object> ##图片标注目标
<name>insulatorname> #标注目标类别
<pose>Unspecifiedpose> #物体的姿态
<truncated>0truncated> #物体是否被部分遮挡(>15%)
<difficult>0difficult> #是否为难以辨识的物体,主要指要结体背景才能判断出类别的物体。虽有标注, # 但一般忽略这类物体
<bndbox> ##标注的bbox左上角和右下角坐标
<xmin>229xmin>
<ymin>212ymin>
<xmax>341xmax>
<ymax>366ymax>
bndbox>
object>
<object>
<name>wirename> #第二个标注类别名
<pose>Unspecifiedpose>
<truncated>1truncated> ##被遮挡超过15%
<difficult>0difficult>
<bndbox>
<xmin>1xmin>
<ymin>204ymin>
<xmax>563xmax>
<ymax>302ymax>
bndbox>
object>
<object>
<name>binding wirename> #第三个标记类别
<pose>Unspecifiedpose>
<truncated>0truncated>
<difficult>0difficult>
<bndbox>
<xmin>202xmin>
<ymin>201ymin>
<xmax>341xmax>
<ymax>248ymax>
bndbox>
object>
annotation>
注意:若存在同类别多个标注,则每个类别的独立标注都会有一个
(3)生成训练数据集
- 构建训练集文件结构:
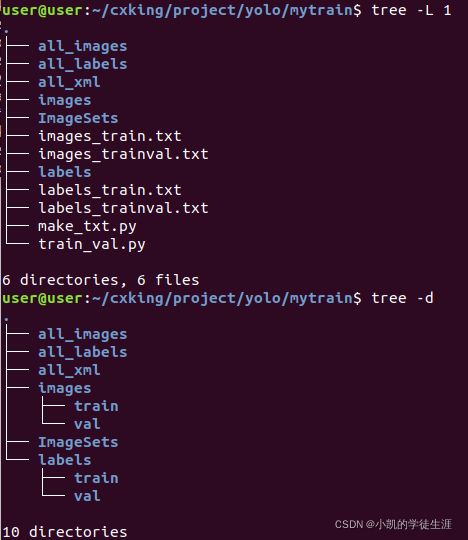
其中:
mytrain
├── all_images:存放所有图片;
├── all_xml:放置生成的所有与训练图片对应的xml文件;
├── all_labels:由文件train_val.py生成,将all_xml中xml文件转为txt文件存于all_labels文件夹中,并生成训练需要的架构;
├── make_txt.py:用来划分数据集,生成四个只包含图片名称的txt文件;
└── train_val.py:该文件一方面将all_xml中xml文件转为txt文件存于all_labels文件夹中,另一方面生成训练所需数据存放架构;
-
设定数据集中训练和测试比例并进行划分:(make_txt.py)
import os #路径处理包 import random #随机数包 trainval_percent = 0.1 #所有数据中测试用数据比例10% train_percent = 0.9 #训练数据比例90% #├── train 占90% #└── trainval 占10% # ├── test 占90%*10% # └── val 占10%*10% xmlfilepath = 'all_images' #图片所在路径 txtsavepath = 'ImageSets' #生成txt文件路径 total_xml = os.listdir(xmlfilepath) num = len(total_xml) #所有图片数 list = range(num) #计算各类数据实际量 tv = int(num * trainval_percent) tr = int(tv * train_percent) #随机生成固定个数序列 trainval = random.sample(list, tv) #从所有list中返回tv个数量的项目 train = random.sample(trainval, tr) if not os.path.exists('ImageSets/'): os.makedirs('ImageSets/') ftrainval = open('ImageSets/trainval.txt', 'w') ftest = open('ImageSets/test.txt', 'w') ftrain = open('ImageSets/train.txt', 'w') fval = open('ImageSets/val.txt', 'w') for i in list: name = total_xml[i][:-4] + '\n' if i in trainval: ftrainval.write(name) if i in train: ftest.write(name) else: fval.write(name) else: ftrain.write(name) ftrainval.close() ftrain.close() fval.close() ftest.close()
-
生成模型需要的数据集存放架构:(train_val.py)
该文件一方面将all_xml中xml文件转为txt文件存于all_labels文件夹中,另一方面生成训练所需数据存放架构
import xml.etree.ElementTree as ET #Python标准库中处理xml的API import pickle # 可以将对象以文件的形式存放在磁盘上。 import os # 路径处理包 import shutil # python高级文件操作模块(例如复制文件内容,创建文件的新副本并进行归档) from os import listdir, getcwd from os.path import join sets = ['train', 'trainval'] #数据集名称 classes = ['binding wire','wire','insulator'] #类别名称 # xyxy -> xywh######################## # 返回值为ROI中心点相对于图片大小的比例坐标,和ROI的w、h相对于图片大小的比例 # box里保存的是ROI感兴趣区域的坐标(xyxy) def convert(size, box): dw = 1. / size[0] #浮点数除法则执行精确除法 dh = 1. / size[1] x = (box[0] + box[1]) / 2.0 y = (box[2] + box[3]) / 2.0 w = box[1] - box[0] h = box[3] - box[2] x = x * dw w = w * dw y = y * dh h = h * dh return (x, y, w, h) # 对于单个xml的处理 def convert_annotation(image_id): in_file = open('all_xml/%s.xml' % (image_id)) out_file = open('all_labels/%s.txt' % (image_id), 'w') tree = ET.parse(in_file) root = tree.getroot() size = root.find('size') w = int(size.find('width').text) h = int(size.find('height').text) for obj in root.iter('object'): difficult = obj.find('difficult').text cls = obj.find('name').text if cls not in classes or int(difficult) == 1: continue cls_id = classes.index(cls) xmlbox = obj.find('bndbox') b = (float(xmlbox.find('xmin').text), float(xmlbox.find('xmax').text), float(xmlbox.find('ymin').text), float(xmlbox.find('ymax').text)) bb = convert((w, h), b) #生成ROI out_file.write(str(cls_id) + " " + " ".join([str(a) for a in bb]) + '\n') #打印当前路径 wd = getcwd() print(wd) #遍历所有数据集和类别,对每个数据进行处理并按结构保存 for image_set in sets: if not os.path.exists('all_labels/'): os.makedirs('all_labels/') image_ids = open('ImageSets/%s.txt' % (image_set)).read().strip().split() image_list_file = open('images_%s.txt' % (image_set), 'w') labels_list_file=open('labels_%s.txt'%(image_set),'w') for image_id in image_ids: image_list_file.write('%s.jpg\n' % (image_id)) labels_list_file.write('%s.txt\n'%(image_id)) convert_annotation(image_id) #如果标签已经是txt格式,将此行注释掉,所有的txt存放到all_labels文件夹。 image_list_file.close() labels_list_file.close() #创建yolo训练格式新路径 def copy_file(new_path,path_txt,search_path):#参数1:存放新文件的位置 参数2:为上一步建立好的train,val训练数据的路径txt文件 参数3:为搜索的文件位置 if not os.path.exists(new_path): os.makedirs(new_path) with open(path_txt, 'r') as lines: filenames_to_copy = set(line.rstrip() for line in lines) # print('filenames_to_copy:',filenames_to_copy) # print(len(filenames_to_copy)) for root, _, filenames in os.walk(search_path): # print('root',root) # print(_) # print(filenames) for filename in filenames: if filename in filenames_to_copy: shutil.copy(os.path.join(root, filename), new_path) #按照划分好的训练文件的路径搜索目标,并将其复制到yolo格式下的新路径 copy_file('./images/train/','./images_train.txt','./all_images') copy_file('./images/val/','./images_trainval.txt','./all_images') copy_file('./labels/train/','./labels_train.txt','./all_labels') copy_file('./labels/val/','./labels_trainval.txt','./all_labels')该文件将每个xml标注提取为bbox信息为txt格式(这种数据集格式成为yolo_txt格式),每个图像对应一个txt文件,文件每一行为一个目标的信息
训练文件格式:

将制作好的mytrain文件夹与下载好的yolov5文件夹放入同一级文件夹中。
-
制作自定义数据集的yaml文件:(mytrain.yaml)
接着按照yolov5-master/data/coco128.yaml文件,制作mytrain.yaml文件(与coco128.yaml文件同目录):
(YAML是一种标记语言,也可称为资源清单文件。可以实现对大量的资源对象进行编排部署,是一种基于Unicode容易阅读,容易和脚本语言交互的,用来表达资料序列的编程语言。)
# Default dataset location is next to /yolov5:
# /parent_folder
# /mycoco
# /yolov5
# train and val data as 1) directory: path/images/, 2) file: path/images.txt, or 3) list: [path1/images/, path2/images/]
train: ../mytrain/images/train/ # 训练集路径
val: ../mytrain/images/val/ # 测试集路径
# number of classes
nc: 3 # 数据类别
# class names
names: ['binding wire','wire','insulator'] # 类别名称
训练数据集:(train.py)
更改train.py文件相应的参数(预训练模型,训练的数据集),这里使用yolov5s.pt为预训练模型,更改yolov5s.yaml文件中的参数(自己的类别数):
def parse_opt(known=False):
parser = argparse.ArgumentParser()
parser.add_argument('--weights', type=str, default=ROOT / 'yolov5s.pt', help='initial weights path')###### 预训练模型
parser.add_argument('--cfg', type=str, default='', help='model.yaml path') # 模型默认值
parser.add_argument('--data', type=str, default=ROOT / 'data/mytrain.yaml', help='dataset.yaml path')####### 数据集yaml文件
parser.add_argument('--hyp', type=str, default=ROOT / 'data/hyps/hyp.scratch.yaml', help='hyperparameters path') #超参数
parser.add_argument('--epochs', type=int, default=300) #向前和向后传播中所有批次的单次训练迭代300次
parser.add_argument('--batch-size', type=int, default=16, help='total batch size for all GPUs, -1 for autobatch') #每批数据量的大小,及每多少个样本iteration一次
parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='train, val image size (pixels)') #数据图像默认尺寸
- 训练结果分析:(/yolov5/runs/train/)
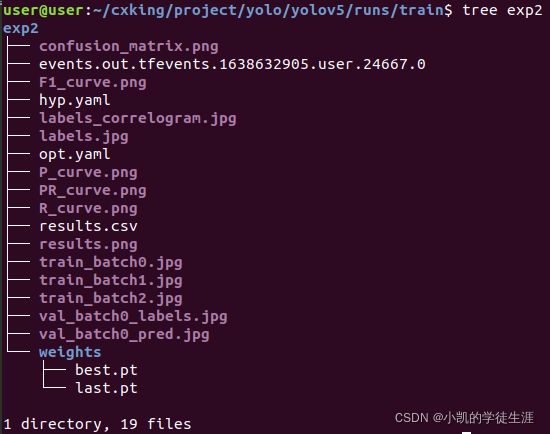
训练完以后可以看到在runs/train/exp/weights下生成了训练好的权重文件包含best.pt(做detect时用这个)和last.pt(最后一次训练模型),其中last.pt主要是用来在上次程序中断之后,下次可以继续接着进行训练。
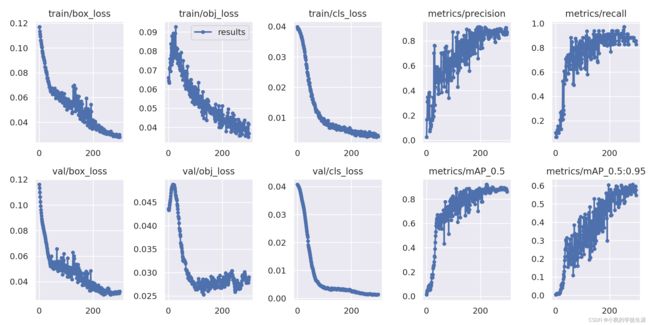
方法:大体观察个损失是否收敛稳定,主要观察precision精度和recall召回率;
- GIoU:推测为GIoU损失函数均值,越小方框越准;
- Objectness:推测为目标检测loss均值,越小目标检测越准;
- Classification:推测为分类loss均值,越小分类越准;
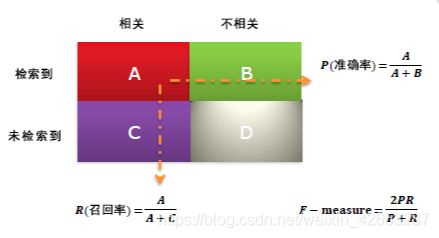
- Precision:精度(找对的正类/所有找到的正类);
![]()
- Recall:召回率(找对的正类/所有本应该被找对的正类);
![]()
- [email protected] & [email protected]:0.95:就是mAP是用Precision和Recall作为两轴作图后围成的面积,m表示平均,@后面的数表示判定iou为正负样本的阈值,@0.5:0.95表示阈值取0.5:0.05:0.95后取均值。
- F-measure:F值定义为‘精度’和‘召回率’的调和平均,F值较高的时候说明试验方法有效,结果比较符合预期;
测试训练模型:(detect.py)
用训练好的权重文件进行测试,修改detect.py文件,修改权重文件路径和输入测试文件,然后run:
def parse_opt():
parser = argparse.ArgumentParser()
parser.add_argument('--weights', nargs='+', type=str, default=ROOT / '/home/user/cxking/project/yolo/yolov5/runs/train/exp2/weights/best.pt', help='model path(s)')########
parser.add_argument('--source', type=str, default=ROOT / 'data/images', help='file/dir/URL/glob, 0 for webcam')
parser.add_argument('--imgsz', '--img', '--img-size', nargs='+', type=int, default=[640], help='inference size h,w')
执行:python detect.py --source 0

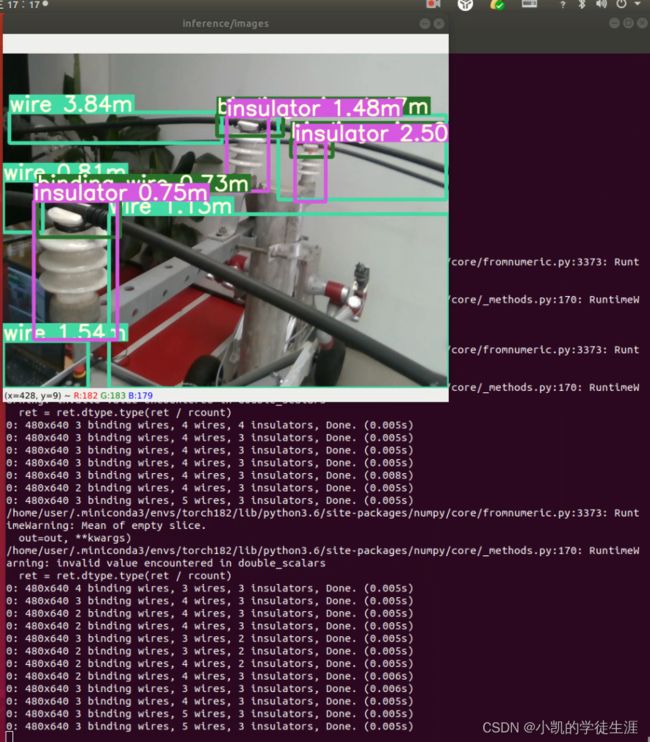
应用:结合realsense相机的sdk实现目标检测加测距(realsensedetect.py)
结合源码的detect.py文件改编:
分别对一下模块进行修改和添加:
#from utils.general import plot_one_box,set_logging
###########################################################################
# 按要求在图像img上绘制一个边界框
def plot_one_box(x, img, color=None, label=None, line_thickness=None):
tl = line_thickness or round(0.002 * (img.shape[0] + img.shape[1]) / 2) + 1 # 字体大小
color = color or [random.randint(0, 255) for _ in range(3)] #随机颜色
c1, c2 = (int(x[0]), int(x[1])), (int(x[2]), int(x[3]))
cv2.rectangle(img, c1, c2, color, thickness=tl, lineType=cv2.LINE_AA) #通过确定对角线位置来画矩形框
if label:
tf = max(tl - 1, 1) # font thickness字体粗细
t_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0]
c2 = c1[0] + t_size[0], c1[1] - t_size[1] - 3
cv2.rectangle(img, c1, c2, color, -1, cv2.LINE_AA) # filled
cv2.putText(img, label, (c1[0], c1[1] - 2), 0, tl / 3, [225, 255, 255], thickness=tf, lineType=cv2.LINE_AA)
#(图片img,“文本内容”,(左下角坐标),字体,字体大小,(颜色),线条粗细,线条类型)
def set_logging(name=None, verbose=True):
# 设置级别并返回记录器
rank = int(os.getenv('RANK', -1)) # rank in world for Multi-GPU trainings
logging.basicConfig(format="%(message)s", level=logging.INFO if (verbose and rank in (-1, 0)) else logging.WARNING)
return logging.getLogger(name)
LOGGER = set_logging(__name__) # define globally (used in train.py, val.py, detect.py, etc.)
# from utils.torch_utils import load_classifier, time_synchronized
########################################
# 加载预训练的模型重塑为n类输出
def load_classifier(name='resnet101', n=2):
model = torchvision.models.__dict__[name](pretrained=True)
# ResNet model properties
# input_size = [3, 224, 224]
# input_space = 'RGB'
# input_range = [0, 1]
# mean = [0.485, 0.456, 0.406]
# std = [0.229, 0.224, 0.225]
# Reshape output to n classes
filters = model.fc.weight.shape[1]
model.fc.bias = nn.Parameter(torch.zeros(n), requires_grad=True)
model.fc.weight = nn.Parameter(torch.zeros(n, filters), requires_grad=True)
model.fc.out_features = n
return model
def time_synchronized():
torch.cuda.synchronize() if torch.cuda.is_available() else None
return time.time()
###########################################################################
import argparse # python的命令行解析的标准模块 可以让我们直接在命令行中就可以向程序中传入参数并让程序运行
import os
import shutil
import time
from pathlib import Path # Path将str转换为Path对象 使字符串路径易于操作的模块
import cv2
import torch
import torch.backends.cudnn as cudnn # cuda模块
from numpy import random
import numpy as np
import pyrealsense2 as rs #导入realsense的sdk模块
from models.experimental import attempt_load
from utils.general import (
check_img_size, non_max_suppression, apply_classifier, scale_coords,
xyxy2xywh, plot_one_box, strip_optimizer, set_logging)
from utils.torch_utils import select_device, load_classifier, time_synchronized
from utils.datasets import letterbox
def detect(save_img=False):
# 加载参数
out, source, weights, view_img, save_txt, imgsz = \
opt.save_dir, opt.source, opt.weights, opt.view_img, opt.save_txt, opt.img_size
webcam = source == '0' or source.startswith(('rtsp://', 'rtmp://', 'http://')) or source.endswith('.txt')
# 初始化
set_logging() #生成日志
device = select_device(opt.device) # 获取当前主机可用的设备
if os.path.exists(out): # output dir
shutil.rmtree(out) # delete dir
os.makedirs(out) # make new dir
# 如果设配是GPU 就使用half(float16) 包括模型半精度和输入图片半精度
half = device.type != 'cpu' # half precision only supported on CUDA
# 载入模型和模型参数并调整模型
model = attempt_load(weights, map_location=device) # 加载Float32模型
imgsz = check_img_size(imgsz, s=model.stride.max()) # 确保输入图片的尺寸imgsz能整除stride=32 如果不能则调整为能被整除并返回
if half: # 是否将模型从float32 -> float16 加速推理
model.half() # to FP16
# 加载推理数据
vid_path, vid_writer = None, None
#采用webcam数据源
view_img = True
cudnn.benchmark = True # 加快常量图像大小推断
#dataset = LoadStreams(source, img_size=imgsz) #load 文件夹中视频流
# 获取每个类别的名字和随机生成类别颜色
names = model.module.names if hasattr(model, 'module') else model.names
colors = [[random.randint(0, 255) for _ in range(3)] for _ in range(len(names))]
# 正式推理
t0 = time.time() #记录时间
# 初始化一个全0tensor进行一次正向推理
img = torch.zeros((1, 3, imgsz, imgsz), device=device)
_ = model(img.half() if half else img) if device.type != 'cpu' else None # run once
#实例化realsense模块
#https://www.rs-online.com/designspark/intelpython2-nvidia-jetson-nanorealsense-d435-cn
pipeline = rs.pipeline()
# 创建 config 对象:
config = rs.config()
#声明RGB和深度视频流
# config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 30)
config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16,30)
config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8,30)
# 启动数据流
pipeline.start(config)
align_to_color = rs.align(rs.stream.color) #对齐rgb和深度图
while True:
start = time.time()
# Wait for a coherent pair of frames(一对连贯的帧): depth and color
frames = pipeline.wait_for_frames() #等待最新的影像,wait_for_frames返回的是一個合成的影像
frames = align_to_color.process(frames) #将上图获取视频帧对齐
# 使用 process 來實現剛剛宣告的 align 對齊功能
#将合成帧分开
depth_frame = frames.get_depth_frame()
color_frame = frames.get_color_frame()
# 转换成 numpy 数据
color_image = np.asanyarray(color_frame.get_data())
depth_image = np.asanyarray(depth_frame.get_data())
mask = np.zeros([color_image.shape[0], color_image.shape[1]], dtype=np.uint8)
mask[0:480, 320:640] = 255
#对RGB的img进行处理,送入预测模型
sources = [source] #数据源
imgs = [None]
path = sources # path: 图片/视频的路径
imgs[0] = color_image
im0s = imgs.copy() # img0s: 原尺寸的图片
img = [letterbox(x, new_shape=imgsz)[0] for x in im0s] # img: 进行resize + pad之后的图片
img = np.stack(img, 0) #沿着0dim进行堆叠
img = img[:, :, :, ::-1].transpose(0, 3, 1, 2) # BGR to RGB, to 3x416x416, uint8 to float32
img = np.ascontiguousarray(img, dtype=np.float16 if half else np.float32)
# ascontiguousarray函数将一个内存不连续存储的数组转换为内存连续存储的数组,使得运行速度更快。
img /= 255.0 # 0 - 255 to 0.0 - 1.0
# 处理每一张图片的数据格式
img = torch.from_numpy(img).to(device) #将numpy转为pytorch的tensor,并转移到运算设备上计算
# 如果图片是3维(RGB) 就在前面添加一个维度1当中batch_size=1
# 因为输入网络的图片需要是4为的 [batch_size, channel, w, h]
if img.ndimension() == 3:
img = img.unsqueeze(0) #在dim0位置添加维度1,[channel, w, h] -> [batch_size, channel, w, h]
t1 = time_synchronized() #精确计算当前时间 并返回当前时间
# 对每张图片/视频进行前向推理
pred = model(img, augment=opt.augment)[0]
# 进行NMS
# conf_thres: 置信度阈值
# iou_thres: iou阈值
# classes: 是否只保留特定的类别 默认为None
# agnostic_nms: 进行nms是否也去除不同类别之间的框 默认False
# max_det: 每张图片的最大目标个数 默认1000
# pred: [num_obj, 6] = [5, 6] 这里的预测信息pred还是相对于 img_size(640) 的
pred = non_max_suppression(pred, opt.conf_thres, opt.iou_thres, classes=opt.classes, agnostic=opt.agnostic_nms)
t2 = time_synchronized()
#后续保存或者打印预测信息
for i, det in enumerate(pred): # detections per image
p, s, im0 = path[i], '%g: ' % i, im0s[i].copy()
s += '%gx%g ' % img.shape[2:] # print string
gn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwh
if det is not None and len(det):
# Rescale boxes from img_size to im0 size
det[:, :4] = scale_coords(img.shape[2:], det[:, :4], im0.shape).round()
# Print results
for c in det[:, -1].unique():
n = (det[:, -1] == c).sum() # detections per class
s += '%g %ss, ' % (n, names[int(c)]) # add to string
# Write results
for *xyxy, conf, cls in reversed(det):
xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # 归一化为 xywh
line = (cls, conf, *xywh) if opt.save_conf else (cls, *xywh) # label format
#获取距离信息
distance_list = []
mid_pos = [int((int(xyxy[0]) + int(xyxy[2])) / 2), int((int(xyxy[1]) + int(xyxy[3])) / 2)] # 获得预测框的中心像素位置
min_val = min(abs(int(xyxy[2]) - int(xyxy[0])), abs(int(xyxy[3]) - int(xyxy[1]))) # 确定偏差搜索范围
# print(box,)
#声明一个num为40的随机序列,同一目标预测框每个序号生成一个深度值
randnum = 40
for i in range(randnum):
bias = random.randint(-min_val // 4, min_val // 4) #生成固定范围内的随机整数为偏差,'//'整数除法
dist = depth_frame.get_distance(int(mid_pos[0] + bias), int(mid_pos[1] + bias)) #从深度视频帧中获得目标点的深度信息
# print(int(mid_pos[1] + bias), int(mid_pos[0] + bias))
if dist:
distance_list.append(dist) #添加到列表
#将40个深度数据进行处理
distance_list = np.array(distance_list)
distance_list = np.sort(distance_list)[
randnum // 2 - randnum // 4:randnum // 2 + randnum // 4] # 冒泡排序实现中值滤波
label = '%s %.2f%s' % (names[int(cls)], np.mean(distance_list), 'm') #最后取平均值为目标深度
plot_one_box(xyxy, im0, label=label, color=colors[int(cls)], line_thickness=3) #将结果框打印回原图
# Print time (inference + NMS)
print('%sDone. (%.3fs)' % (s, t2 - t1))
# Stream results
if view_img:
cv2.imshow(p, im0)
if cv2.waitKey(1) == ord('q'): # q to quit
raise StopIteration
print('Done. (%.3fs)' % (time.time() - t0))
if __name__ == '__main__':
parser = argparse.ArgumentParser()
# parser.add_argument('--weights', nargs='+', type=str, default='yolov5m.pt', help='model.pt path(s)')
parser.add_argument('--weights', nargs='+', type=str, default='/home/user/cxking/project/yolo/yolov5/runs/train/exp2/weights/best.pt', help='model.pt path(s)')
parser.add_argument('--source', type=str, default='inference/images', help='source') # file/folder, 0 for webcam
parser.add_argument('--img-size', type=int, default=640, help='inference size (pixels)')
parser.add_argument('--conf-thres', type=float, default=0.25, help='object confidence threshold')
parser.add_argument('--iou-thres', type=float, default=0.45, help='IOU threshold for NMS')
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--view-img', action='store_true', help='display results')
parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
parser.add_argument('--save-dir', type=str, default='inference/output', help='directory to save results')
parser.add_argument('--classes', nargs='+', type=int, help='filter by class: --class 0, or --class 0 2 3')
parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')
parser.add_argument('--augment', action='store_true', help='augmented inference')
parser.add_argument('--update', action='store_true', help='update all models')
opt = parser.parse_args()
print(opt)
with torch.no_grad(): # 一个上下文管理器,被该语句wrap起来的部分将不会track梯度
detect()
效果展示: