MKS Robin E3D V1.1主板使用说明书

广州谦辉信息科技有限公司
MKS Robin E3D V1.1主板使用说明书

创客基地QQ群:489095605 232237692
邮箱:Huangkaida
文章目录
- 一、产品简述
-
- 1.1 特点优势
- 1.2 主板参数
- 1.3接线图
- 1.4尺寸图
- 1.5开机测试
- 二、固件下载、编译、更新
-
- 2.1固件下载
- 2.2 固件编译
-
- 2.2.1 platformio本地编译
- 2.2.2 网页在线编译
- 2.3固件更新
- 三、驱动跳线设置
-
- 3.1 A4988驱动跳线设置
- 3.2 TMC2208、TMC2209、TMC2226普通模式跳线设置
- 3.3 TMC2225普通模式跳线设置
- 3.4 TMC2208、TMC2209、TMC2225、TMC2226 UART模式跳线设置
- 3.5 TMC2209、TMC2226 Sensorless(无限位)跳线设置
- 四、Marlin 固件配置
-
- 4.1 固件基本配置(必须配置项)
-
- 4.1.1板卡配置
- 4.1.2 串口配置
- 4.1.3 屏幕配置
- 4.1.4 使能sd卡
- 4.1.5 使能eeprom
- 4.1.6 配置编译环境
- 4.2机器参数配置(根据机器参数设置)
-
- 4.2.1 挤出头个数配置
- 4.2.2 热敏类型配置
- 4.2.3 限位类型配置
- 4.2.4 脉冲设置
- 4.2.5 归零方向设置
- 4.2.6 打印平台范围设置
- 4.2.7电机方向设置
- 4.3高级配置
-
- 4.3.1 断电续打
- 4.3.2 断料检测
- 4.3.5 MKS UPS
- 4.3.6 MKS PWC(打完关机模块)
- 4.3.7 TMC 2208/TMC 2209/TMC 2225/TMC 2226 uart 模式配置
- 五、3dtouch自动调平功能
-
- 5.1设置传感器触发电平
- 5.2设置传感器信号接口
- 5.3 使能BLTOUCH
- 5.4设置探针与挤出头之间的偏移
- 5.5设置调平时传感器与打印平台边缘的距离
- 5.6 使能自动调平
- 5.7 设置调平网格点数
- 5.8 使能舵机
- 5.9 增加自动调平数据调用代码
- 六、技术支持及保证
- 七、FAQ
一、产品简述
MKS E3D主板是创客基地推出的32位3D打印主控板,该主板CPU采用STM32F103RCT6,主频最高72MHZ,支持TMC驱动 UART模式、无限位回零,主板预留Bltouch接口,可搭配3Dtouch、BLtouch实现自动调平,主板可直接安装到Ender_3S、CR_10机器上,对机器进行升级。
1.1 特点优势
1、 采用ARM 32-bit Cortex™-M4 CPU STM32F103RCT6 主频最高72MHZ;
2、支持DC12-24V输入,端子为KF635 30A/300V;
3、热床支持20A以内电流,端子为KF635 20A/300V,TB是热床测温(NTC100K);
4、 1路喷头支持10A以内电流,ETEMP是1路喷头测温(NTC100K)
5、1路独立可控风扇支持1A以内;
6、 灵活的电机驱动座方式,可支持TMC2209、2208、2225、2226,4988,8825,2100,及各种直插式驱动,支持TMC驱动UART模式;
7、 支持断电检测,断料检测,BLTOUCH
8、 引出AUX-1接口,支持MKS TFT系列触屏,支持LCD屏
9、板载SDIO接口TF卡座
10、支持 USB联机打印
11、开源marlin2.X固件
1.2 主板参数

1.3接线图
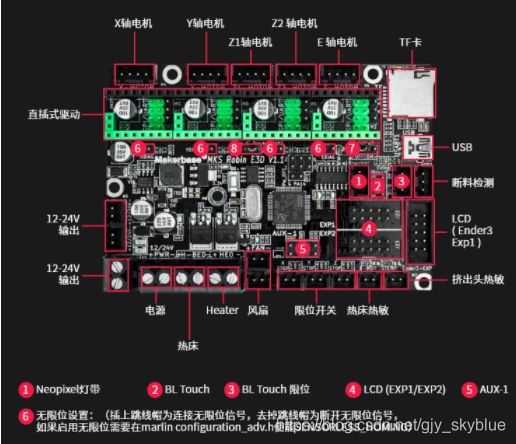
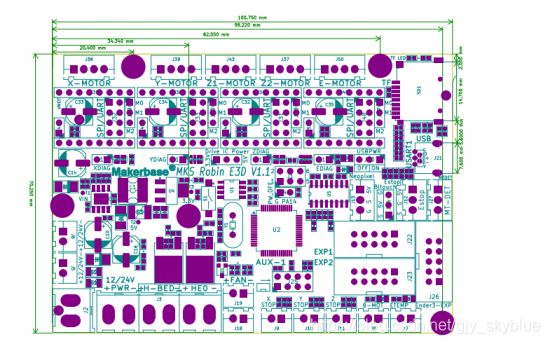
1.4尺寸图
1.5开机测试
MKS Robin_E3开机测试视频链接:
https://www.bilibili.com/video/BV11A411b71e?from=search&seid=412889955687350540
二、固件下载、编译、更新
2.1固件下载
MKS Robin E3D V1.1适配的固件为marlin2.X固件,可以在Makerbase 官方github下载,下载地址:
也可在Marlin 官方下载2.0.6.1以上版本的marlin固件,固件下载地址:
https://github.com/MarlinFirmware/Marlin
2.2 固件编译
2.2.1 platformio本地编译
MKS Robin E3D V1.1固件的编译需要先安装VScode软件 和安装platformio编译插件,安装详情请参考视频教程:https://www.bilibili.com/video/BV1XK4y1C7k5
2.2.2 网页在线编译
在线编译,可登录创客基地百众云网页,上传固件的压缩包,在线编译,编译成功后的固件文件将会发送到你的邮箱,方便快捷,在线编译网址:https://baizhongyun.cn/home/index
网页在线编译教程链接:
https://blog.csdn.net/gjy_skyblue/article/details/118763474?spm=1001.2014.3001.5501
2.3固件更新
本地编译的,编译成功后的.bin文件在.pio文件夹中;在线编译的,编译成功后文件将会发送到你的邮箱;将Robin_e3.bin复制到TF卡,把卡插到主板的卡槽,然后重新给主板上电,等待更新完即可。
三、驱动跳线设置
注:主板上给驱动供电的电压是可以通过跳线设置的,可以设置为3.3或者5V,必须设置为其中之一,不设置驱动将无法工作,建议设置为5V,设置为3.3V时,A4988驱动的电压将减半,电流也减半。

3.1 A4988驱动跳线设置
A4988驱动细分跳线方式,驱动下方右边的3个跳线帽都插上是16细分,如下图(X轴为例):
3.2 TMC2208、TMC2209、TMC2226普通模式跳线设置
TMC2208、TMC2209、TMC2226驱动细分跳线方式,驱动下方右边的2个跳线帽(M0、M1)插上是16细分,如下图(X轴为例):

3.3 TMC2225普通模式跳线设置
TMC2225驱动细分跳线方式,驱动下方右边的第2个跳线帽(M1)插上是16细分,如下图(X轴为例):

3.4 TMC2208、TMC2209、TMC2225、TMC2226 UART模式跳线设置
TMC2208、TMC2209、TMC2225、TMC2226 UART模式跳线设置都是相同的,驱动下方的左边第3个跳线插上即为uart模式,如下图(X轴为例):
注:UART 模式可以在屏上设置驱动的电流、工作模式,要实现UART 模式,还需要固件的支持,固件的配置方式详情见4.3.7
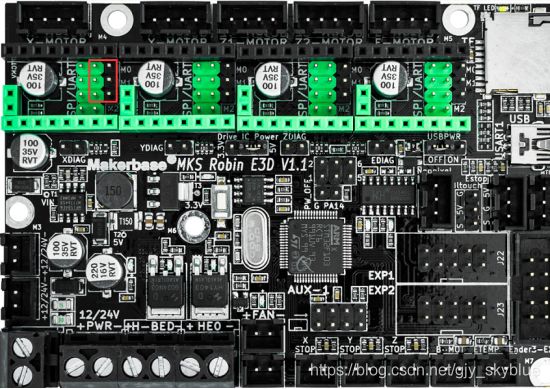
3.5 TMC2209、TMC2226 Sensorless(无限位)跳线设置
TMC2209、TMC2226 要实现sensorless功能,需要首先将驱动设置为UART 模式,限位接口不能接限位,然后需要在主板上的DIGA 排针处对应插上跳线帽,如下图(以X、Y轴为例):

注:1、由于Z轴丝杆阻力较大,容易误触发导致归零的位置不一致,因此不建议Z 轴使用sensorless功能
2、要实现sensorless功能,还需要固件的支持,固件的配置详情见4.3.7
四、Marlin 固件配置
4.1 固件基本配置(必须配置项)
4.1.1板卡配置
在configuration.h文件中将板卡配置为
BOARD_MKS_ROBIN_E3D_V1_1

4.1.2 串口配置
在configuration.h文件中将串口设置为1,配置错误会导致主板与电脑无法连接。

4.1.3 屏幕配置
使用Ender_3S机器上的原屏幕,在configuration.h文件中,使能#define CR10_STOCKDISPLAY

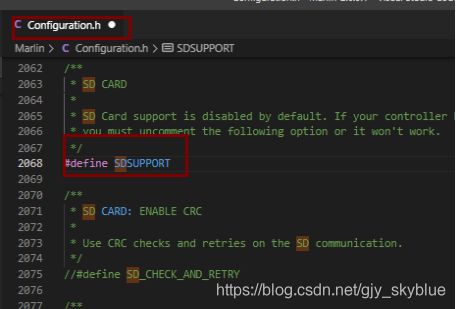
4.1.4 使能sd卡
在配置文件中使能#define SDSUPPORT
4.1.5 使能eeprom
在配置文件中使能#define EEPROM_SETTINGS

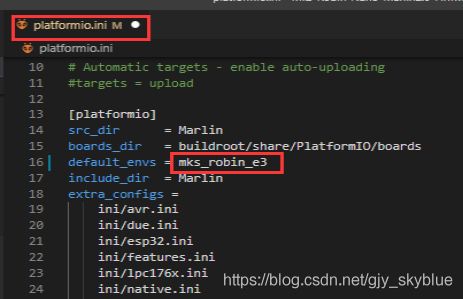
4.1.6 配置编译环境
在文件platformio.ini 中,将编译环境改为
default_envs = mks_robin_e3
4.2机器参数配置(根据机器参数设置)
4.2.1 挤出头个数配置
MKS Robin_e3d最多支持1个挤出头

4.2.2 热敏类型配置
MKS Ronbin e3d V1.1仅支持100K热敏温度传感器,#define TEMP_SENSOR_0为挤出头,
#define TEMP_SENSOR_BED 为热床

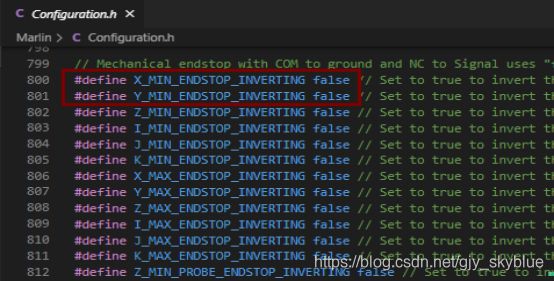
4.2.3 限位类型配置
限位开关类型的配置(true/false),true为常开型开关,false为常闭型开关。

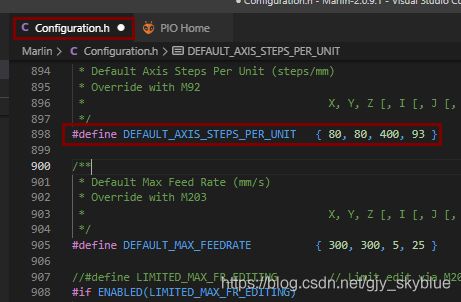
4.2.4 脉冲设置
在配置文件中的
#define DEFAULT_AXIS_STEPS_PER_UNIT {80, 80, 400, 93}分别进行X、Y、Z、E各轴的脉冲设置。
4.2.5 归零方向设置
在配置文件中进行归零方向设置,-1为往最小方向,1为往最大方向

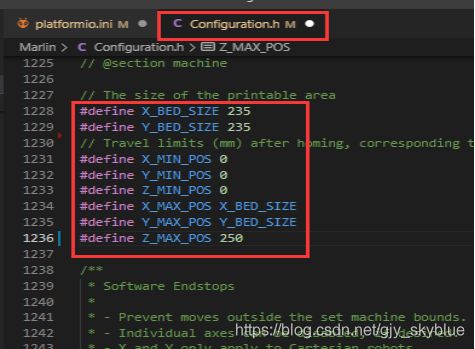
4.2.6 打印平台范围设置
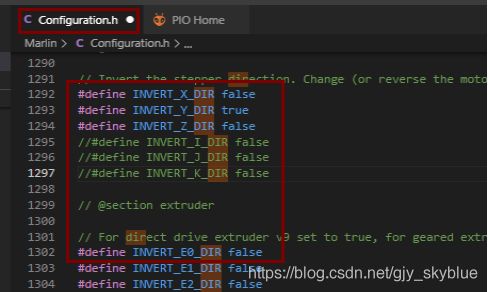
4.2.7电机方向设置
电机方向设置,false和true为代表两个转动方向,当移动方向相反,相反配置即可。
4.3高级配置
4.3.1 断电续打
在高级配置configuration_adv.h文件中,使能
#define POWER_LOSS_RECOVERY
将 #define PLR_ENABLED_DEFAULT false改为
#define PLR_ENABLED_DEFAULT true

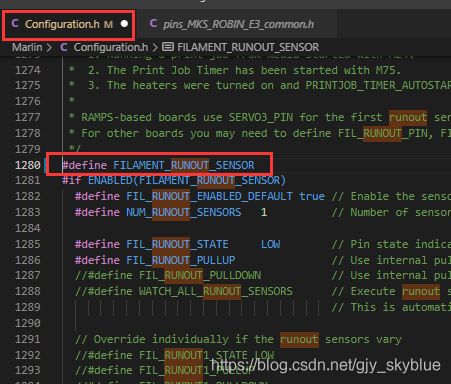
4.3.2 断料检测
在配置文件中使能#define FILAMENT_RUNOUT_SENSOR
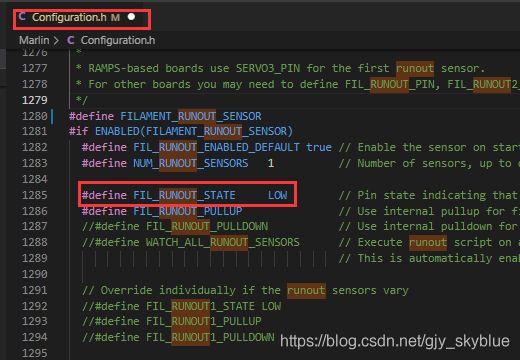
在配置文件设置断料检测开关的电平(LOW/HIGH)
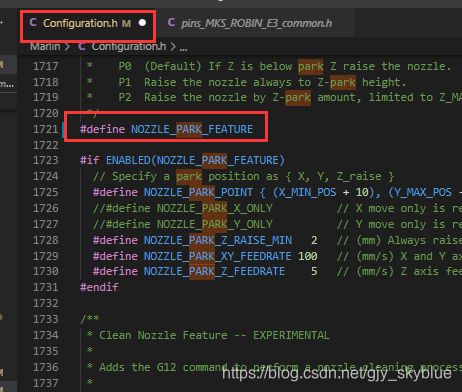
在配置文件文件中使能#define NOZZLE_PARK_FEATURE
在高级配置文件中使能#define ADVANCED_PAUSE_FEATURE
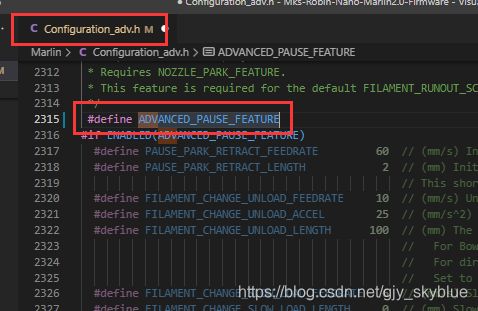
在高级配置文件使能#define PARK_HEAD_ON_PAUSE

4.3.5 MKS UPS
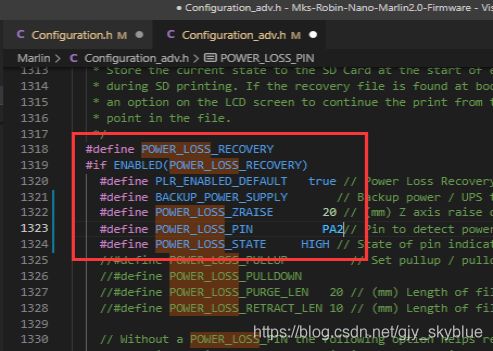
在高级配置文件中使能以下配置项
Enable #define POWER_LOSS_RECOVERY
Set #define PLR_ENABLED_DEFAULT true
Enable #define BACKUP_POWER_SUPPLY
Set #define POWER_LOSS_ZRAISE 20 //断电后抬升的高度
Set #define POWER_LOSS_PIN PA2 //断电检测pin
Set #define POWER_LOSS_STATE HIGH
4.3.6 MKS PWC(打完关机模块)
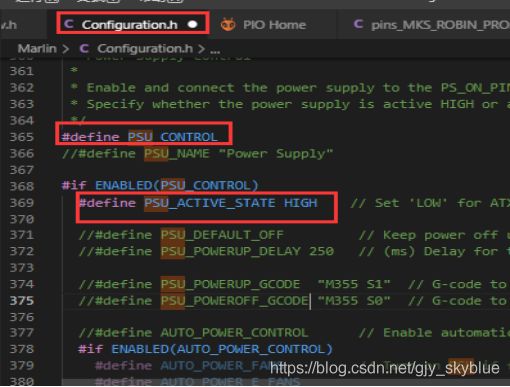
在配置文件中,使能#define PSU_CONTROL
将#define PSU_ACTIVE_STATE LOW改为 #define PSU_ACTIVE_STATE HIGH
在pins_MKS_ROBIN_E3_common.h中添加如下代码:
#if ENABLED(PSU_CONTROL)
#ifndef PS_ON_PIN
#define PS_ON_PIN PC5 //PW_OFF, you can change it to other pin
#endif
#ifndef KILL_PIN
#define KILL_PIN PB10 //PW_DET, you can change it to other pin
#endif
#define KILL_PIN_INVERTING true //true : HIGH level trigger
#define KILL_PIN_STATE KILL_PIN_INVERTING
#endif

4.3.7 TMC 2208/TMC 2209/TMC 2225/TMC 2226 uart 模式配置
TMC 驱动 uart模式,需要硬件支持,需要在驱动左下第二个插针插上跳线帽。

在配置文件中使能TMC驱动,TMC2208和TMC2225均使能为TMC 2208,TMC 2209和TMC2226均使能为TMC2209。

TMC UART模式驱动电流设置,可在屏上点击设置→电机设置→驱动电流进行设置,也可在固件的高级配置进行设置(注:设置的电流需要乘以1.41才是峰值电流)。

TMC 2209 /TMC2226 sensorless(无限位) 功能配置,sensorless 需要硬件支持,需要在主板上的DIGA 排针处对应插上跳线帽

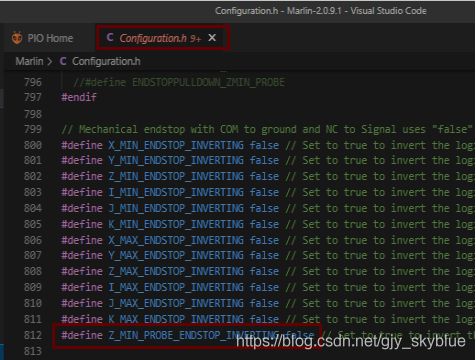
在配置中,将开关类型设置为false( X和Y轴为例)
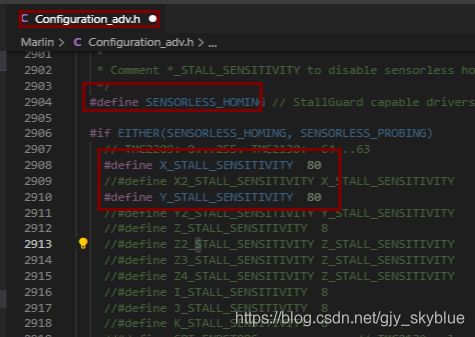
在高级配置文件中使能sensorless_homing和配置阻塞阈值
五、3dtouch自动调平功能
5.1设置传感器触发电平
3dtouch的电平设置为false
5.2设置传感器信号接口
传感器信号线默认接到Zmax 限位接口,pin口为PB1

5.3 使能BLTOUCH

5.4设置探针与挤出头之间的偏移
分别为X、Y、Z轴的偏移,X和Y的偏移需要根据实际测量填写,Z_offset可以在调平完后进行测试调整。

5.5设置调平时传感器与打印平台边缘的距离
该数值默认为10(注:该数值不能设置为太小,太小会导致调平时传感器超出平台范围,导致调平失败)

5.6 使能自动调平
在配置文件使能线性自动调平

5.7 设置调平网格点数
在配置文件文件中设置调平点数,默认为3*3 个点

5.8 使能舵机
在配置文件中使能舵机#define NUM_SERVOS 1
(注:Robin nano e3d V1.1 只有一个舵机接口,舵机数量只能设置为1)

5.9 增加自动调平数据调用代码
在G28.cpp文件中增加set_bed_leveling_enabled(true);

六、技术支持及保证
发货前会做通电测试,保证可以正式使用才发货。
欢迎各位朋友加入讨论群:232237692
欢迎光临博客交流:https://blog.csdn.net/gjy_skyblue
3D打印机主板定制,联系黄生:13148932315 谭生:15521395023 彭生:13427595835
有问题可联系我们客服或者在群里找技术支持人员,我们将竭诚为您服务
七、FAQ
1、主板无法更新固件如何处理?
答:确认是否更新对固件,Robin_e3d的固件的名称是Robin_e3.bin;
确认主板供电是否正常,通电后检查主板上的电源指示灯是否亮;主板已接上过多负载的情况下,不建议用USB给主板供电来更新固件,这样容易供电不足导致无法更新固件。
2、更新固件后,LCD屏上显示的显示的脉冲、最大速度等参数不对如何处理
答:在屏上进入高级设置界面,初始化eeprom,然后返回到设置界面,保存数据,加载数据
3、主板无法与电脑的上位机连接怎么办?
答:确认配置文件中的主板的串口是否正确,Robin e3d使用的是串口1;
主板连接到电脑后,进入设备管理器查看电脑是否识别了主板的com口,如识别了,可以重启上位机,上位机设置的波特率需要与配置文件设置的一致;如无法识别,检查usb的连接是否接触良。
4、3Dtouch自动调平效果不好如何处理?
答:⭐可以增加调平点数;
⭐可以在配置文件中使能#define MULTIPLE_PROBING 2,每点重复调平,以获取精度更高的平均值;
⭐可以切换自动调平的方式,#define AUTO_BED_LEVELING_LINEAR适合倾斜的平面平台
#define AUTO_BED_LEVELING_BILINEAR适合弯曲不平的平台和大平台。
5、自动调平失败如何处理?
自动调平失败的原因有很多,我们为此做了一个视频,详情见链接:
https://www.bilibili.com/video/BV1ZB4y1P7LZ?from=search&seid=12028097711066543268
6、屏上出现TMC 报错如何让处理?
答:屏上出现TMC驱动报错是因为主板固件使能了TMC 驱动uart模式,而主板与驱动之间通讯失败。
1、确认主板是否用了TMC驱动(TMC2208、2209、2225、2226),如果没有使用,则需要在配置文件屏蔽TMC驱动
2、使用了TMC驱动,固件配置又是正确的,需要确认硬件是否已设置为uart 模式,就是驱动下方的跳线是否正确,详见3.4
3、如果以上配置都正确,则有可能是存在驱动有问题,可以用上位机发送指令 查看,连接状态显示没有连接的