【Apollo 6.0项目实战】LGSVL 与 Apollo 6.0联合仿真教程
文章目录
- 前言
- 一、Apollo 6.0安装
- 二、LGSVL安装
-
- 1. 注册账户
- 2. 下载Linux版本仿真器
- 3. 启动仿真器
- 4. 配置自己的仿真环境
- 三、LGSVL 与 Apollo6.0 联合仿真
-
- 1. Apollo启动
- 2. LGSVL启动
- 3. LGSVL与Apollo的联合仿真
- 四、演示视频
- 五、Apollo 模块上机实践
- 参考
前言
SVL Simulator 是一个用于自动驾驶汽车和机器人系统开发的仿真平台。
目前SVL Simulator 提供了百度开发的开源 AD 系统平台Apollo以及Autoware Foundation开发的Autoware.AI和Autoware.Auto的集成。
本文教程在Ubuntu 20.04 下实现 LGSVL 与 Apollo 6.0的联合仿真。
一、Apollo 6.0安装
Apollo 6.0安装教程参考 https://blog.csdn.net/Travis_X/article/details/120947607
二、LGSVL安装
1. 注册账户
先在官网注上册一个账户,注册后会收到了“完成注册”的电子邮件,单击了“验证电子邮件”链接,进行验证即可。

2. 下载Linux版本仿真器
到官网下载Linux版本的仿真器 svlsimulator-linux64-2021.3.zip。
3. 启动仿真器
解压 svlsimulator-linux64-2021.3.zip文件后双击打开simulator文件

打开后界面如下图所示

点击OPEN BROWSER配置会自动打开一个网页,登录自己的账号,如下图所示。
您可以查看Store中看到各种的地图、车辆类型和插件,可以创建自己的仿真环境。

4. 配置自己的仿真环境
点击左侧显示栏的Simulation
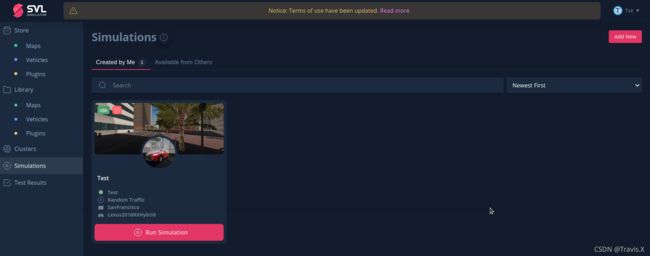
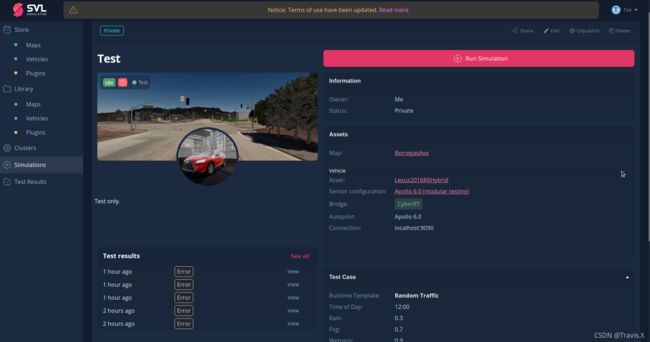
选择右上角的Add New按钮,按照提示填写配置文件信息
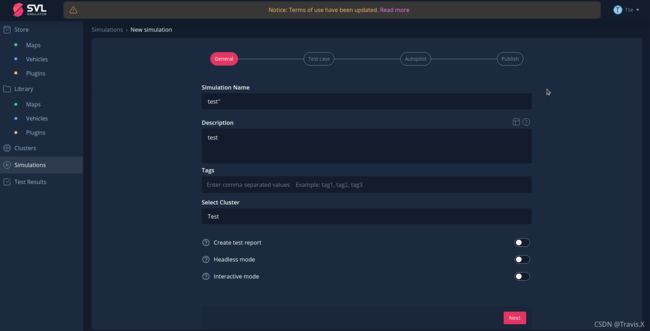
因为有些地图Apollo6.0文件夹中没有以及有些车辆不支持Apollo6.0,所以地图和车辆可以按照我的来填写,选择地图BorregasAve和车辆Lexus2016RXHybrid,车辆下方要选择Apollo6.0(Module Testing)。

下方的参数模式时间、天气、交通等参数可以自己随意填写,填写完后点击Save保存。
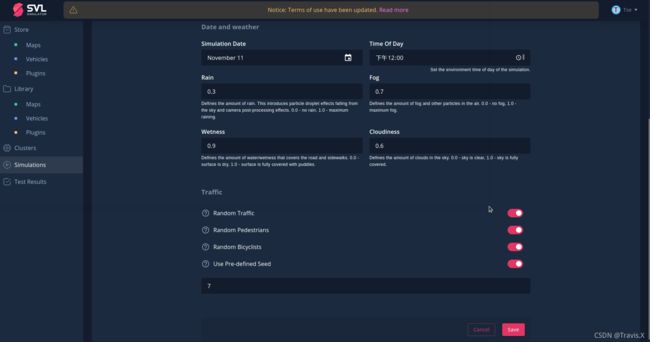
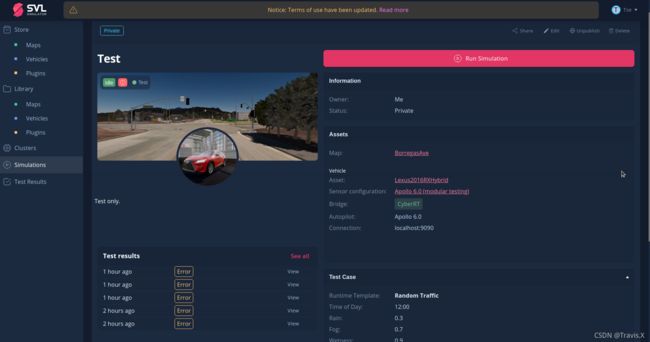
保存后会出现以下界面,但先不着急启动。
三、LGSVL 与 Apollo6.0 联合仿真
1. Apollo启动
cd apollo/
./docker/scripts/dev_start.sh
./docker/scripts/dev_into.sh
./scripts/bootstrap_lgsvl.sh
./scripts/bridge.sh
打开Dreamview http://localhost:8888/,在上方选择对应的模式、车型以及地图。

2. LGSVL启动
点击Run Simulation按钮
这时候可以看到加载的仿真环境。
3. LGSVL与Apollo的联合仿真
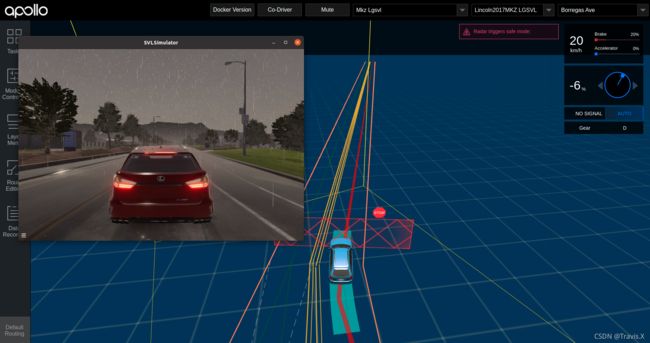
启动对应的模块就可以看到与仿真环境对应的车辆和地图。

点击左侧栏的Route editing进行全局的路径规划。
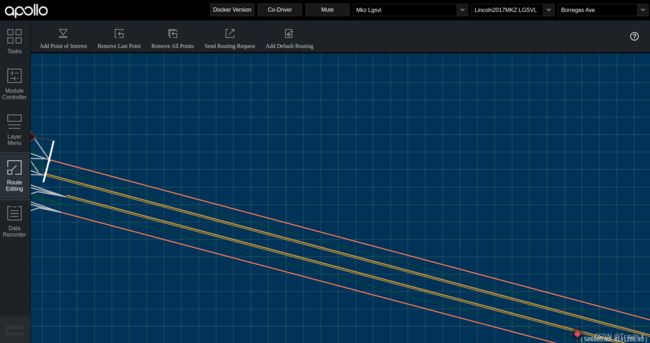
发布目标点后,仿真环境的车辆就会开始进入自动驾驶模式。
四、演示视频
【自动驾驶】Apollo 6.0 与 LGSVL 联合仿真(4)
【自动驾驶】Apollo 6.0 与 LGSVL 联合仿真(3)
【自动驾驶】Apollo 6.0 与 LGSVL 联合仿真(2)
【自动驾驶】Apollo 6.0 与 LGSVL 联合仿真(1)
五、Apollo 模块上机实践
【Apollo 6.0项目实战】HD-Map模块
【Apollo 6.0项目实战】Canbus模块
【Apollo 6.0项目实战】Localization模块
【Apollo 6.0项目实战】Perception模块
【Apollo 6.0项目实战】Prediction模块
【Apollo 6.0项目实战】Routing模块
【Apollo 6.0项目实战】Planning模块
【Apollo 6.0项目实战】Control模块
参考
【1】SVL Simulator: An Autonomous Vehicle Simulator