开心一刻
爷爷有退休金,奶奶没有
可奶奶很要强
为了不让爷爷看不起,她找了份环卫的工作
结果要早起,她起不来
现在爷爷每天要早起扫大街
前情回顾
关于快排,楼主之前写过两篇关于它的文章
排序之快速排序 → 基本版实现,排序之快速排序 → 基本版优化
感觉讲的有点突兀,看过之后你们的表情是这样的
贴心的我实在是难以忍受你们那无辜的小眼神,决定让你们的表情变成这样
两区域划分
问题描述:给定一个整型数组 arr 和一个整数 target ,请把小于等于 target 的数放在数组的左边,大于 target 的数放在数组的右边
常规实现
如果不做任何限制,我相信大家很容易想到如下方法
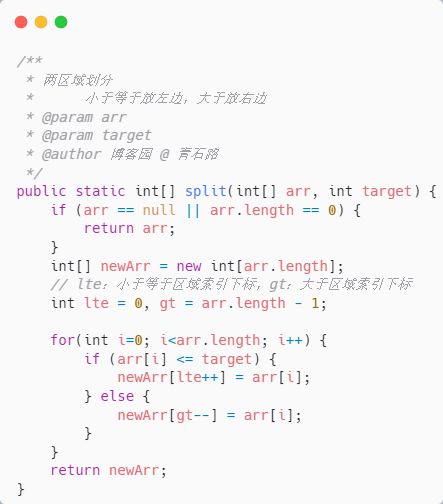
准备一个新数组,然后遍历 arr , arr 素逐个与 target 进行比较
小于等于 target 的元素从左往右放入到新数组中,大于 target 的元素从右往左放入到新数组中
当 arr 遍历完,新数组中的元素顺序即是:小于等于 target 的数在左边,大于 target 的数在右边
我们来看代码实现
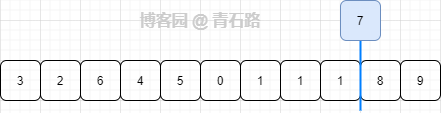
假设 arr 是 [9,8,3,2,6,4,5,0,1,1,1] , target 是 7,那么得到的结果是 [3,2,6,4,5,0,1,1,1,8,9]
细心的小伙伴会大声道:你这不对,3 怎么在 2 的前面,6 的位置也不对,...
现在是区域划分,不是排序、不是排序、不是排序!
我们换个方式来看
现在清楚了吧
我们从两个维度来看看这个算法的优劣,时间复杂度 O(N) ,额外空间复杂度 O(N)
时间复杂度已经没法优化,额外空间复杂度能不能优化了?
优化实现
常规实现中,用了一个新的数组,那有没有什么办法拿掉这个新数组后,仍然可以完成区域的划分了?
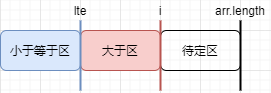
我们记录边界索引 lte , lte 左边是小于等于区域, lte 至遍历索引 i 之间是大于区域,具体实现步骤如下
分两种情况进行处理
1、如果 arr[i] <= target ,则 arr[i] 和 lte 的前一个元素进行交换, lte 右移,i++
2、如果 arr[i] > target , lte 不动,i++
我们看个具体案例就懂了
相当于小于等于区推着大于区往后走
再来看具体代码实现

此时,时间复杂度 O(N) ,只用到了一个额外变量 lte ,所以额外空间复杂度 O(1)
荷兰国旗(三区域划分)
我们把问题进行一个升级:给定一个整型数组 arr ,和一个数 target ,请把小于 target 的数放在数组的左边,等于 target 的数放在数组的中间,大于 target 的数放在数组的右边
荷兰国旗是三种颜色

正好对应问题描述中的三个区域,所以也称这个问题为荷兰国旗问题
常规实现
可以在 两区域划分 的 常规实现 的基础上进行改造;我们直接看代码
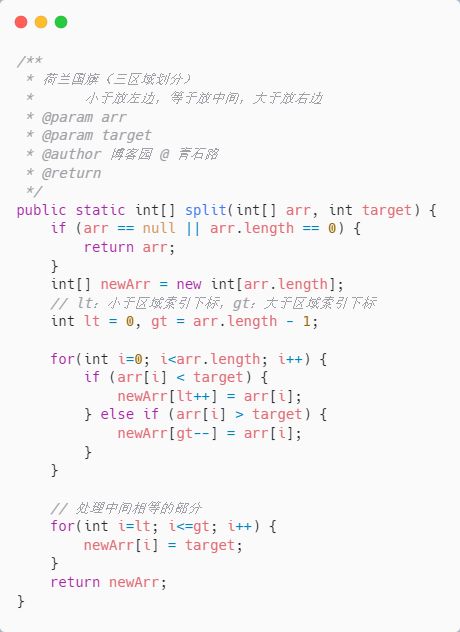
很明显,时间复杂度 O(N) ,额外空间复杂度 O(N)
时间复杂度已经没法优化了,我们需要优化额外空间复杂度
优化实现
如果要求额外空间复杂度 O(1),时间复杂度 O(N)
类比 两区域划分 的 优化实现 ,我们分两个边界索引,左边界索引 lt 往左是小于区,右边界索引 gt 往右是大于区, lt 至遍历索引 i 之间是等于区域,i 至 gt 之间是待定(未比较)区域

分三种情况进行处理:
1、 arr[i] < target , arr[i] 和 lt 后一个元素进行交换, lt 右移,i++
2、 arr[i] == target ,i++
3、 arr[i] > target , arr[i] 和 gt 前一个元素进行交换, gt 左移,i 不动
我们来看个具体案例就理解了
是不是有点感觉了?
我们再来看看代码的实现
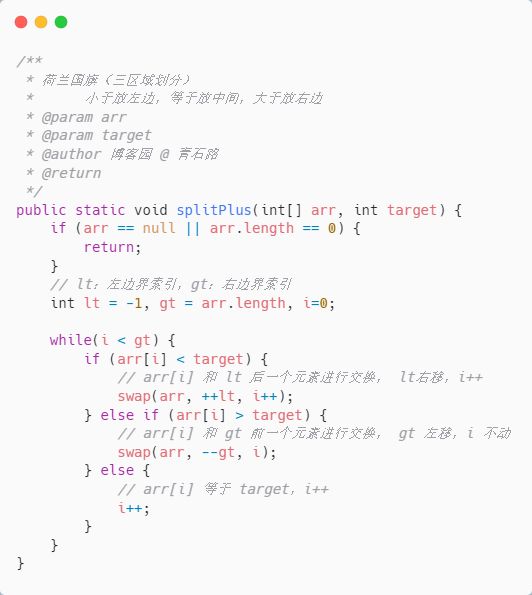
时间复杂度 O(N) ,仅用了有限几个变量,额外空间复杂度 O(1)
快速排序
配角已经悉数登场,接下来有请主角登场

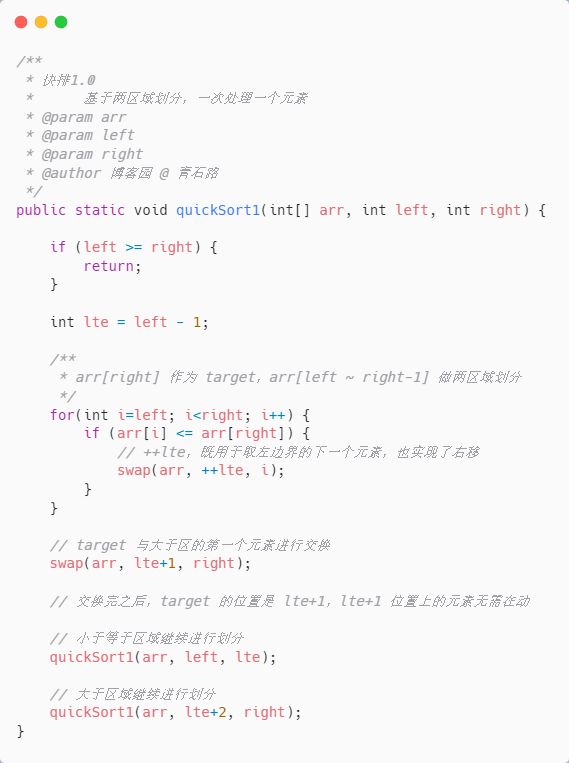
1.0 版本
基于 两区域划分 ,我们来实现快速排序
1、我们取最后一个元素作为 target ,将最后一个元素之前(不包括最后一个元素)所有元素进行一次 两区域划分 ,然后将大于区的第一个元素与 target 进行交换
2、此时 target 所在的位置是 lte + 1 ,然后对 left ~ lte 和 lte+2 ~ right 这两个区域分别做 两区域划分
3、重复步骤1、2,最终实现排序
直接看代码
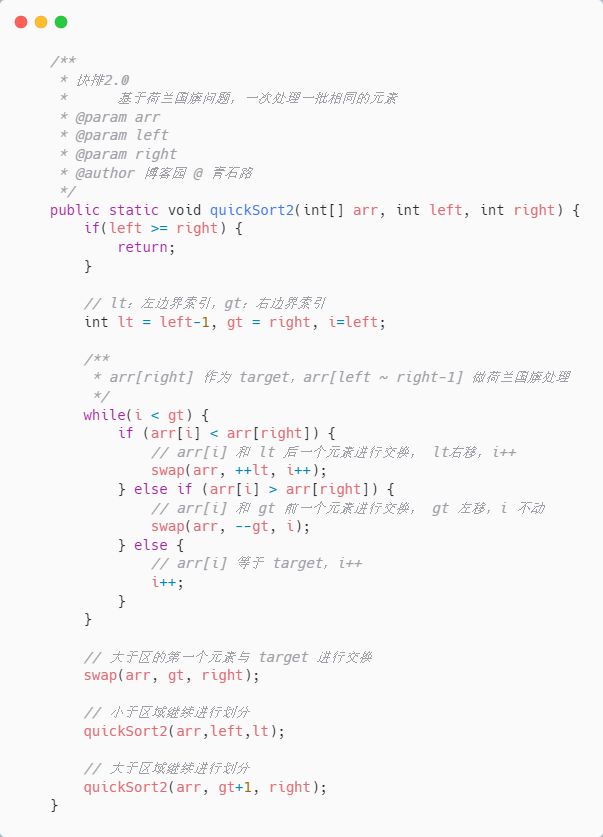
2.0 版本
类似 荷兰国旗问题 对 两区域划分 的优化,一次处理一批等于 target 的元素
处理步骤与 1.0 版本 类似,如下
1、取最后一个元素作为 target ,将最后一个元素之前的元素按 荷兰国旗问题 处理,然后将大于区域的第一个元素与 target 进行交换
2、此时, lt+1 ~ gt 范围的元素都等于 target ,不需要再处理;只需要对 left ~ lt 和 gt+1~ right 这两个区域分别做 荷兰国旗问题 处理
3、重复步骤1、2,最终实现排序
代码实现如下:
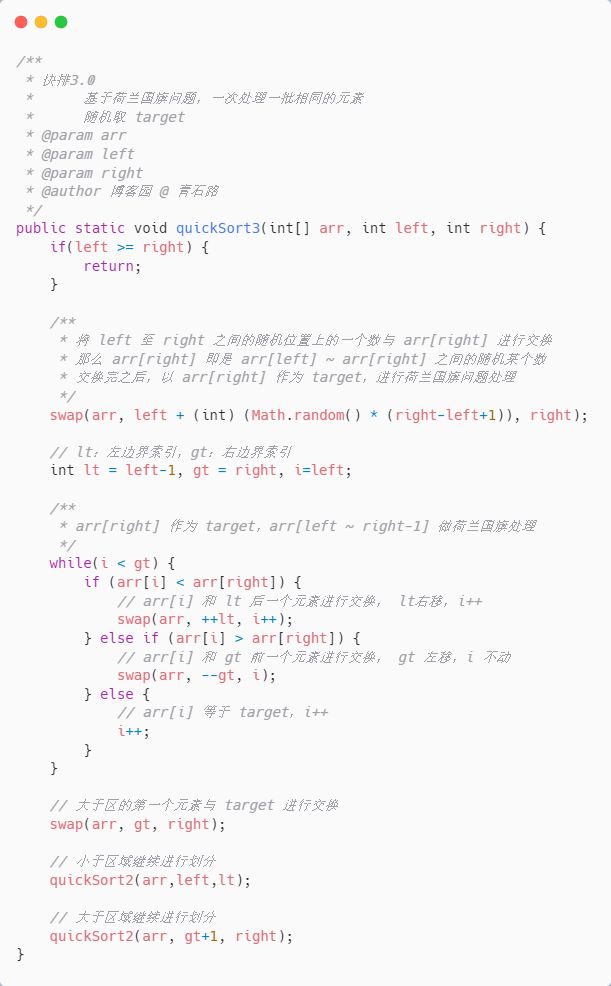
3.0 版本
不管是 1.0 版本 还是 2.0 版本 ,时间复杂度都是 O(N2),比如对 [1,2,3,...,N-1,N] 进行排序
时间复杂度就是:O( N-1 + N-2 + ... + 2 + 1 ),常数项可以忽略,也就是 O(N2)
因为我们取 target 的时候,固定取的最右边元素,所以我们需要随机取 target
我们可以从 left ~ right 中随机取一个元素作为 target ,然后以此 target 对 arr[left...right] 做 荷兰国旗问题 处理
代码实现如下:
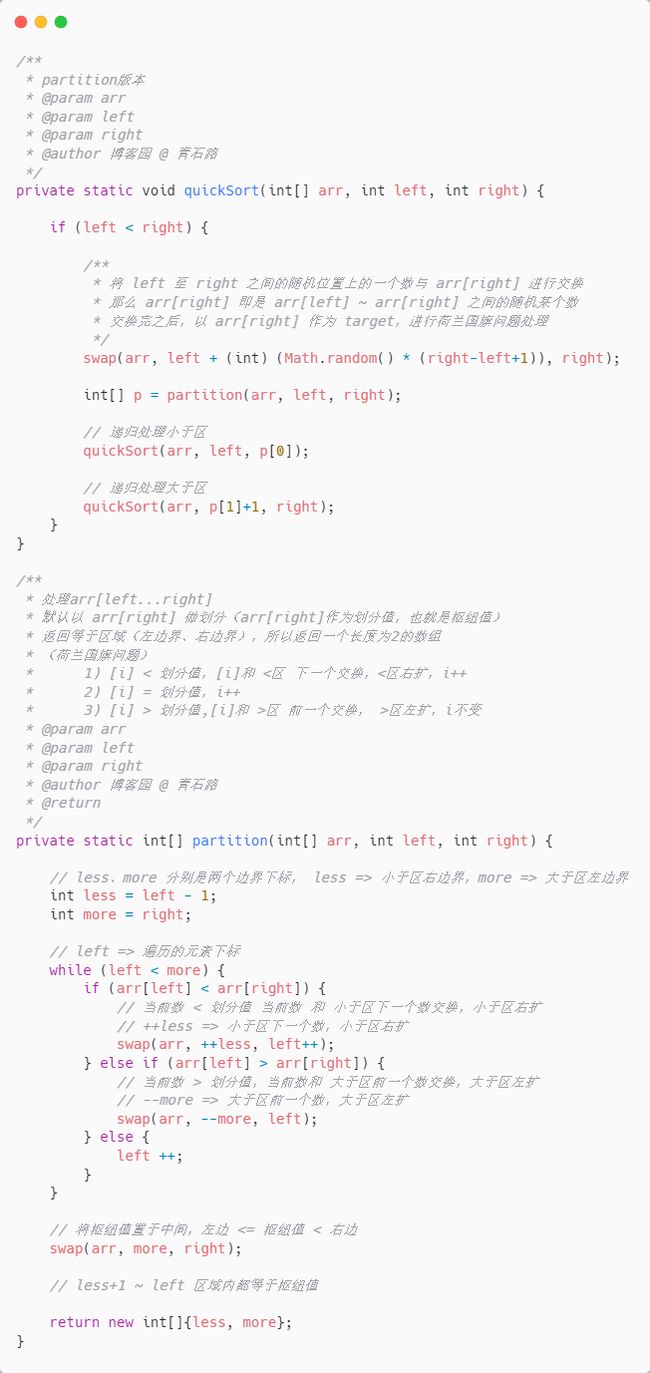
partition 版本
其实就是 3.0 版本 的另外一种叫法
实现基本一致,如下
总结
演进过程
从 两区域划分 -> 荷兰国旗问题 -> 快速排序
快排 1.0 -> 快排 2.0 -> 快排 3.0
递进式实现,便于大家理解快速排序
注意点
实现的过程中,一些边界值需要注意
边画图,边梳理,结合实际案例进行分析实现