OpenCV文档矫正
OpenCV文档矫正
需求
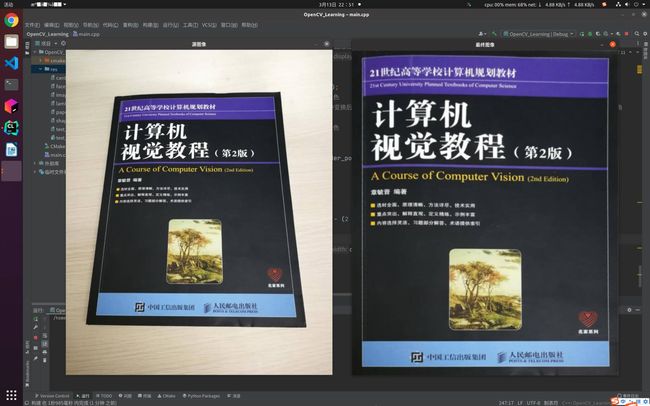
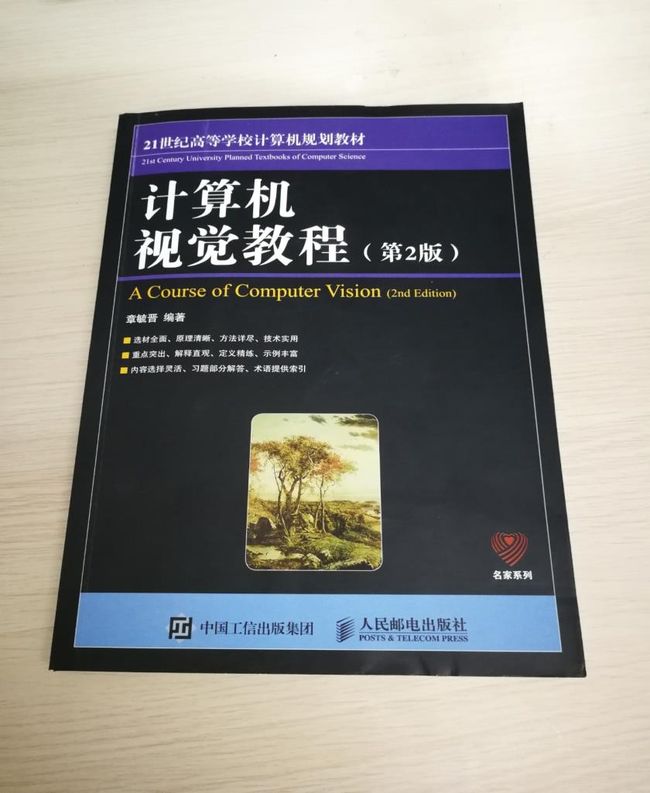
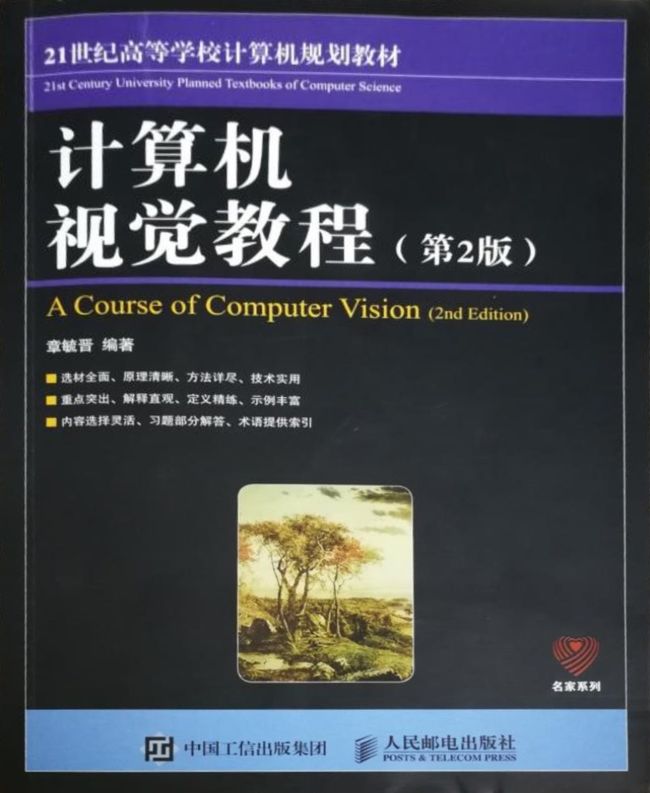
将一个斜着拍摄的文档矫正成正的,如图所示:
思路
- 读取原始图像,若图像太大可以先进行缩放处理,并获取原始图像的宽和高
- 对图像进行预处理得到边缘,依次进行灰度处理、高斯模糊、边缘检测、膨胀、腐蚀。
- 找到最大的轮廓,并提取角点
- 进行降噪处理:检测轮廓面积,只保留大于阈值面积的轮廓
- 计算每个轮廓的周长,使用DP算法计算出轮廓点的个数,规则为周长*0.02
- 找到图像中面积最大的,且角点为4的轮廓
- 将找到的四个角点排列成一个固定的顺序,排列后的顺序为:左上角-右上角-左下角-右下角
- 将每个点的xy坐标值相加(x+y),左上角的点的坐标和应该是最小的,右下角的点的坐标和应该是最大的
- 将每个点的xy坐标值相减(x-y),左下角的点的坐标差应该是最小的,右上角的点的坐标差应该是最大的
- 重新排列四个角点
- 进行透视变换
- 根据变换前及变换后的四个角点,创建变换矩阵
- 根据变换矩阵对图像进行透视变换
- 若透视变换后有一些毛边,按需要进行裁剪,裁剪后重新调整比例
- 创建一个矩形用来裁剪,并设定四周裁剪5像素
- 裁剪后重新调整图像宽高
- 显示变换后图像
代码
代码中均有详细注释,请仔细阅读
#include 效果