OpenCV 查找轮廓
本文将结合实例代码,介绍 OpenCV 如何查找轮廓、获取边界框。
- 代码: contours.py
OpenCV 提供了 findContours 函数查找轮廓,需要以二值化图像作为输入、并指定些选项调用即可。
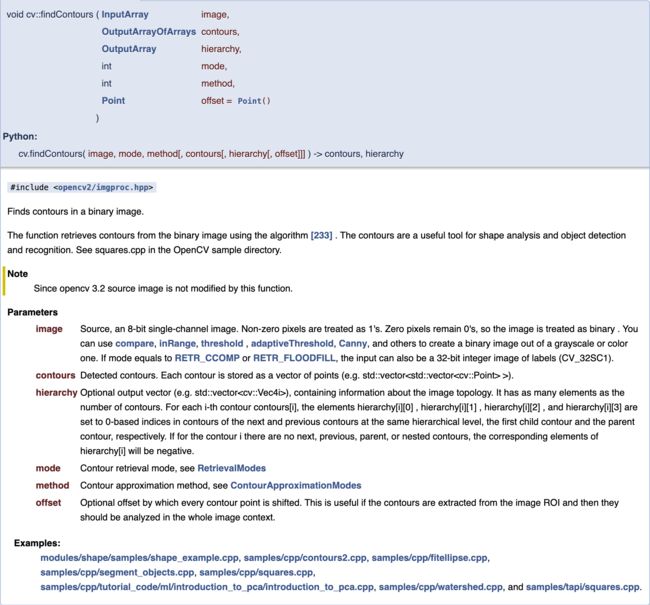
我们以下图作为示例:

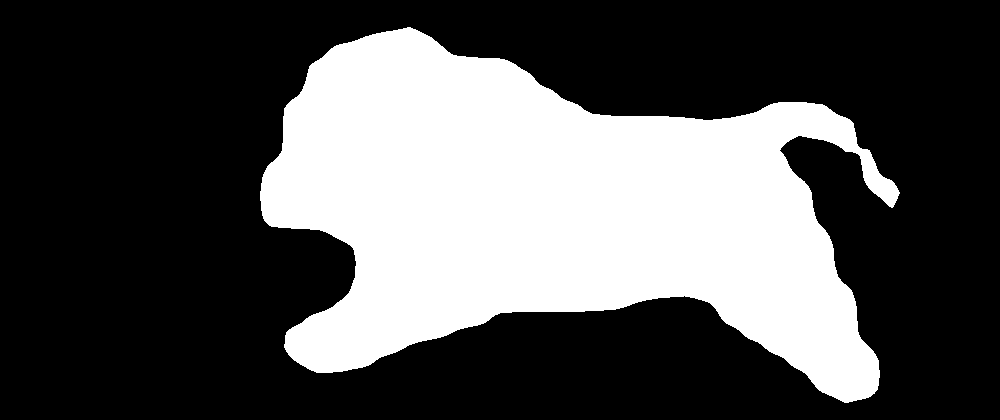
二值化图像
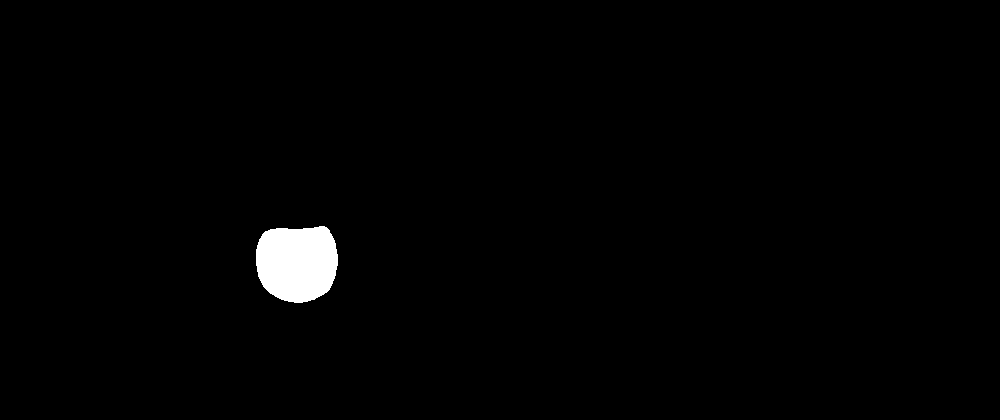
代码工程 data/ 提供了小狗和红球的二值化掩膜图像:
其使用预训练好的实例分割模型来生成的,脚本可见 detectron2_seg_threshold.py。模型检出结果,如下:

模型用的 Mask R-CNN 已有预测边框。但其他模型会有只出预测掩膜的,此时想要边框就可以使用 OpenCV 来提取。
本文代码也提供了根据色域来获取红球掩膜的办法:
import cv2 as cv
import numpy as np
# 读取图像
img = cv.imread(args.image, cv.IMREAD_COLOR)
# HSV 阈值,获取掩膜
def _threshold_hsv(image, lower, upper):
hsv = cv.cvtColor(image, cv.COLOR_BGR2HSV)
mask = cv.inRange(hsv, lower, upper)
result = cv.bitwise_and(image, image, mask=mask)
return result, mask
_, thres = _threshold_hsv(img, np.array([0,110,190]), np.array([7,255,255]))
# 清除小点(可选)
kernel = cv.getStructuringElement(cv.MORPH_RECT, (3, 3), (1, 1))
thres = cv.morphologyEx(thres, cv.MORPH_OPEN, kernel)
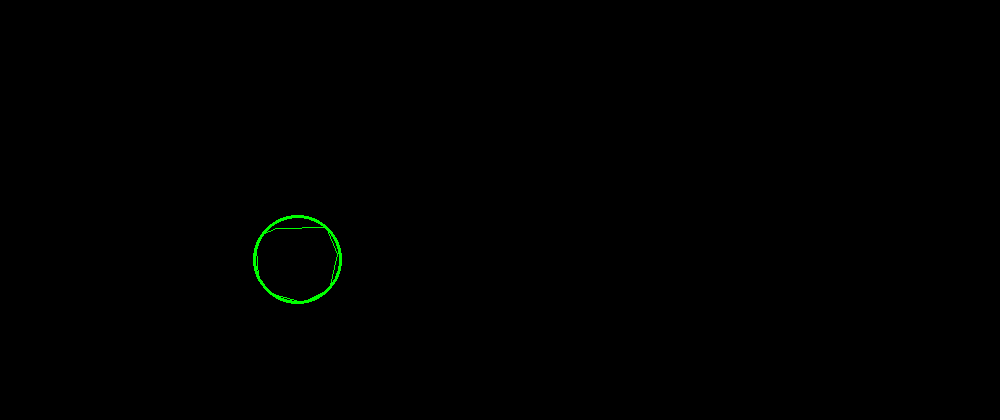
查找轮廓
# 查找轮廓
# cv.RETR_EXTERNAL: 只查找外部轮廓
contours, hierarchy = cv.findContours(
threshold, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
# 近似轮廓,减点(可选)
contours_poly = [cv.approxPolyDP(c, 3, True) for c in contours]
# 绘制轮廓
h, w = threshold.shape[:2]
drawing = np.zeros((h, w, 3), dtype=np.uint8)
for i in range(len(contours)):
cv.drawContours(drawing, contours_poly, i, (0, 255, 0), 1, cv.LINE_8, hierarchy)
获取边界框
boundingRect 获取边界框,并绘制:
for contour in contours_poly:
rect = cv.boundingRect(contour)
cv.rectangle(drawing,
(int(rect[0]), int(rect[1])),
(int(rect[0]+rect[2]), int(rect[1]+rect[3])),
(0, 255, 0), 2, cv.LINE_8)

minEnclosingCircle 获取边界圈,并绘制:
for contour in contours_poly:
center, radius = cv.minEnclosingCircle(contour)
cv.circle(drawing, (int(center[0]), int(center[1])), int(radius),
(0, 255, 0), 2, cv.LINE_8)
参考
- OpenCV Tutorials / Image Processing
GoCoding 个人实践的经验分享,可关注公众号!