BNN领域开山之作——不得错过的训练二值化神经网络的方法
作者‖ cocoon
编辑‖ 3D视觉开发者社区
文章目录
- 导读
- 概述
- 方法
-
- 确定二值化以及随机二值化
- 梯度计算以及累加
- 离散化梯度传播
- 乘法运算优化
-
- 基于位移(shift)的BN
- 基于位移的AdaMax
- 不做二值化的第一层
- 实验
-
- 论文实验结果
- nni中的调用
- 结语
- 参考文献
导读
相较于32位的浮点数神经模型,二值化神经网络通过将权值和隐藏层激活值二值化为1或者-1,达到更高的速度和更小的存储空间,从而使神经网络在移动设备上运行成为可能,其研究意义与价值不可言喻。而该篇论文作为BNN领域的开山之作,提供了一种训练二值化神经网络的方法,并通过实验证明该方法可达到接近SOTA的结果。代码开源,值得一读!
论文链接: https://arxiv.org/pdf/1602.02830.pdf
代码链接:https://github.com/itayhubara/BinaryNet
概述
该论文是2016年的“老”文章,源于Bengio大神等人,是BNN领域的经典文章。BNN相比起普通的32位的浮点数神经网络模型而言,内存占用理论上缩减至 1 32 \frac{1}{32} 321,且由于参数二值的性质,可以将多数运算转变为按位运算,进而有着对移动端非常友好的优势。尽管BNN有着巨大的优势,其特性也带来了网络精度降低以及难以训练的问题。该论文则提供了一种训练BNN的方法,并通过实验证明该方法可以在MNIST,CIFAR-10以及SVHN上面获得接近SOTA的结果。NNI(Neural Network Inteligence)是著名的开源AutoML工具,其对该BNN论文已进行了复现,用户可方便地对其进行调用。
方法
确定二值化以及随机二值化
所谓的确定二值化,指使用一种固定的方式将实值转为二值(+1或-1),转换公式为:
x b = Sign ( x ) = { + 1 if x ≥ 0 − 1 otherwise x^{b}=\operatorname{Sign}(x)= \begin{cases}+1 & \text { if } x \geq 0 \\ -1 & \text { otherwise }\end{cases} xb=Sign(x)={+1−1 if x≥0 otherwise
而所谓的随机二值化的转换公式为:
x b = { + 1 with probability p = σ ( x ) − 1 with probability 1 − p x^{b}= \begin{cases}+1 & \text { with probability } p=\sigma(x) \\ -1 & \text { with probability } 1-p\end{cases} xb={+1−1 with probability p=σ(x) with probability 1−p
其中的 σ \sigma σ指 “hard sigmoid” 函数,具体为:
σ ( x ) = clip ( x + 1 2 , 0 , 1 ) = max ( 0 , min ( 1 , x + 1 2 ) ) \sigma(x)=\operatorname{clip}\left(\frac{x+1}{2}, 0,1\right)=\max \left(0, \min \left(1, \frac{x+1}{2}\right)\right) σ(x)=clip(2x+1,0,1)=max(0,min(1,2x+1))
尽管随机二值化看起来更吸引人,但是在具体实现的时候需要硬件产生随机位,因此,除了某些特定的实验以外,文章主要采用确定二值化的方式。
梯度计算以及累加
尽管BNN的训练方法使用的是二值的权重以及激活函数,但是参数的梯度的计算以及累加,是需要高精度的浮点数的。其实有存在很极端的二值网络连梯度也二值化,但是显然在该论文中是没有这么做的。
对于SGD这类的优化算法来说,浮点的梯度值很可能是必要的。SGD总是会用很小又带有噪声的步子去探索参数空间,而普遍认为这种噪声是服从正态分布的,因而可以在梯度的累加过程中消除掉噪声。也就是说,我们希望梯度的累加是足够细腻的,换句话说,高精度似乎是必须的。此外,这样的噪声可以被认为是某种正则化,进而会有助于泛化。本文中训练BNN的方式可以看做是“Dropout”的一个变种,只不过不是随机的对部分激活函数置为0,而是将所有的激活以及权重二值化。
离散化梯度传播
符号函数的导数几乎处处为0,这使得其难以进行常规的反向传播。因此,我们只能寻找一种方式对其进行“松弛”。Bengio(2013)等人的研究表明STE(straight-through estimator)有着快速训练的优势,STE实质上就是将二值参数的梯度直接作为对应的浮点数的梯度。
STE 过程简介:
假设我们现在有浮点型的模型,每次都在更新浮点权重的梯度。在前向推理时,我们对浮点型的模型进行了二值化,得到推理结果后再反向传播出二值参数的梯度,并使用这二值参数的梯度直接作为浮点数的梯度,用以更新浮点数的权重。训练结束后,直接对浮点型的参数做最后一次二值化,形成最终的二值网络。
因此,该论文也借鉴了STE的思想。考虑到符号函数的表达为:
q = S i g n ( r ) q=Sign(r) q=Sign(r)
假设 g q g_q gq为 q q q的梯度,计算方式为 g q = ∂ C ∂ q g_q = \frac{\partial C}{\partial q} gq=∂q∂C,其中 C C C为损失函数,如果 g q g_q gq已知,那么 ∂ C ∂ r \frac{\partial C}{\partial r} ∂r∂C的STE就可以简单地表达为:
g r = g q 1 ∣ r ∣ ≤ 1 g_r = g_q 1_{|r|\leq 1} gr=gq1∣r∣≤1
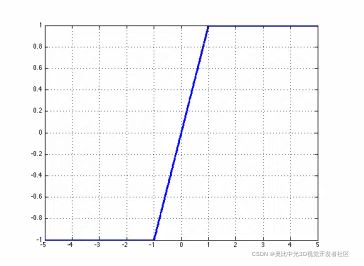
这样做将保持梯度的信息,解决掉符号函数导数都为0的问题。且这样做可以在实数 r r r过大(具体指绝对值大于1的时候)时取消掉梯度,因为如果当 r r r太大时不取消梯度的话,会对训练造成恶劣的影响,而对于实数 r r r的绝对值在1以内的时候,实数 r r r的梯度与 q q q一致。 1 ∣ r ∣ ≤ 1 1_{|r|\leq 1} 1∣r∣≤1可以被认为是使用一种hard tanh的方式对梯度进行传播,相当于逐段的线性激活函数:
Htanh ( x ) = Clip ( x , − 1 , 1 ) = max ( − 1 , min ( 1 , x ) ) . \operatorname{Htanh}(x)=\operatorname{Clip}(x,-1,1)=\max (-1, \min (1, x)) . Htanh(x)=Clip(x,−1,1)=max(−1,min(1,x)).
hard tanh的图形表现为:
对于隐藏单元,我们使用非线性的符号函数来获得二值的激活函数,此外,对于权重的二值化,有以下的两个小点需要注意:
- 限制每一个实值的权重在 [ − 1 , 1 ] [-1,1] [−1,1]的范围内,对于那些数值在 [ − 1 , 1 ] [-1,1] [−1,1]范围以外的权重 w r w^r wr,将其投影到1或者是-1的两个值上;
- 对于实数权重 w r w^r wr,使用符号函数对其进行量化,即 w b = S i g n ( w r ) w^b=Sign(w^r) wb=Sign(wr)。
具体地,这样的STE的方法在前向传播时,有:
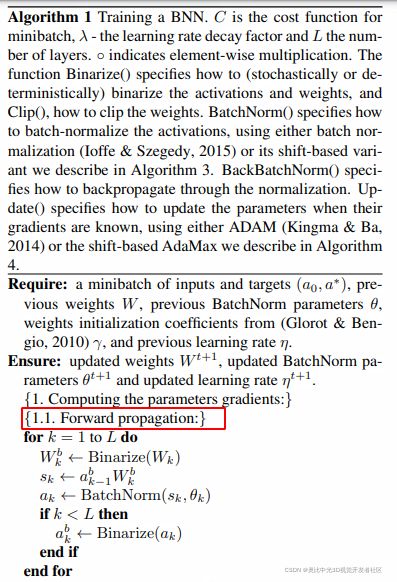
在反向传播时,则有:
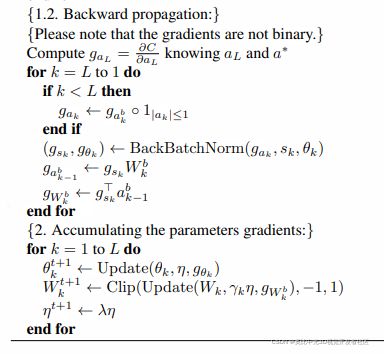
值得注意的是,在伪代码中已经清晰表明梯度并非二值的,这在“2.2 梯度计算以及累加”中也进行了强调。其中,将二值化也看做一层,因此需要先求得二值化层的梯度,此外,网络所求得的梯度尽管是高精度的浮点数,但其作用的对象是二值后的权值,并非二值化前的浮点数。
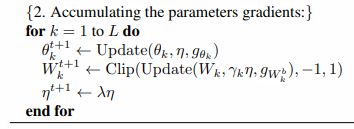
关于参数梯度的累加,有:
乘法运算优化
基于位移(shift)的BN
BN层加速了训练速度并且减小了权重尺度的整体影响。这种归一化的噪声或许有助于模型的正则化,然而,在训练时,BN层需要许多的乘法运算,尽管说这种乘法运算的数量与网络中的神经元数量一致,但是对于许多网络来说,这个数量还是相当大的。举个例子,对于这篇文章中所使用的网络架构,第一层卷积包含了 128 ∗ 3 ∗ 3 128 *3 * 3 128∗3∗3的卷积掩膜,也就是说,它将一个大小为 3 ∗ 32 ∗ 32 3 * 32 * 32 3∗32∗32的影像转换为 3 ∗ 128 ∗ 28 ∗ 28 3 * 128 * 28 * 28 3∗128∗28∗28,这个量级已经是权重量级的数倍了。为了得到BN层所能达到的效果,文章提出了一个所谓的 S B N SBN SBN(shift-based batch normalization)的技巧。具体见以下算法描述:
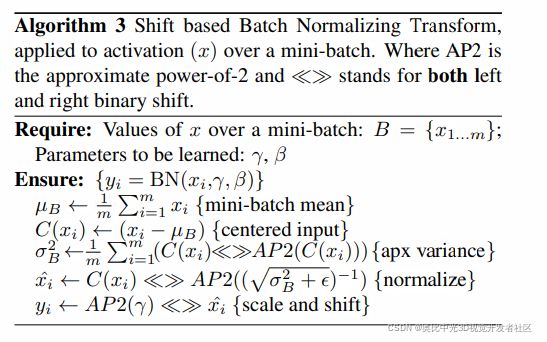
SBN的好处在于几乎不需要乘法运算。此外,在实验中,发现使用SBN相对于BN而言,几乎没有精度损失。
基于位移的AdaMax
ADAM的优化方式似乎也减小了权重尺度的影响,由于ADAM也需要做许多的乘法运算,文章建议使用基于位移的AdaMax,具体见以下算法描述:
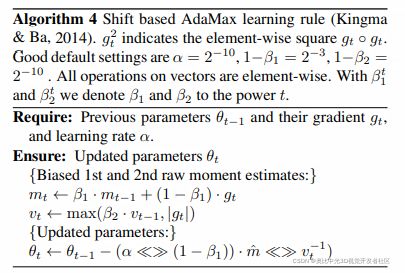
同样地,文章在实验中发现,使用基于位移的AdaMax相对于普通的Adam算法来说,也没有观察到精度损失。
不做二值化的第一层
在BNN中,某一层的输出将作为下一层的输入,而所有层的输入,我们会希望它们都是二值的。这里有一个例外,就是第一层,或者说是输入的图像特征的编码并非二值。然而,文章认为,输入的影像通道数相比起网络内部的高维来说是非常少的,即使是彩色影像,也只有RGB三个通道,且往往影像值都在 [ 0 , 255 ] [0,255] [0,255]之间,所以可以用8比特来表示。其次,将连续数值的输入视作定点数相对来说是比较简单的,举例来说,常用的8位量化定点输入为:
s = x ⋅ w b s = ∑ n = 1 8 2 n − 1 ( x n ⋅ w b ) \begin{aligned} &s=x \cdot w^{b} \\ &s=\sum_{n=1}^{8} 2^{n-1}\left(x^{n} \cdot w^{b}\right) \end{aligned} s=x⋅wbs=n=1∑82n−1(xn⋅wb)
其中,假设 x x x是一个长度为 1024 1024 1024( 32 ∗ 32 32 * 32 32∗32)的向量,其中的每一个元素都是8位的, w b w^b wb是长度为 1024 1024 1024的一比特的权重, s s s是最终的权重的加权和。这个技巧在算法中的表现为:
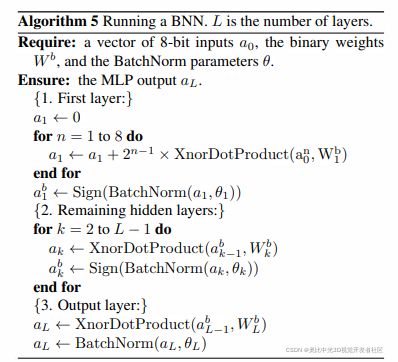
注意到在输入层与第一层隐藏层之间,是8位的,用到了普通的乘法,但其体量较小,对整体影响不大。此外,在算法中,除第一层以外,所有的乘法运算都被替换成了XNOR运算以及popCount的组合,大大地加快了速度。所谓的XNOR指对一对二进制串按位取异或非,而popCount则是用于取得XNOR结果中 1 1 1的个数,而后再通过固定的计算式就可以得到与乘法运算一样的数值结果,这样的运算过程主要是按位运算,对于移动端是非常友好的,这也是BNN的显著优势之一。
实验
论文实验结果
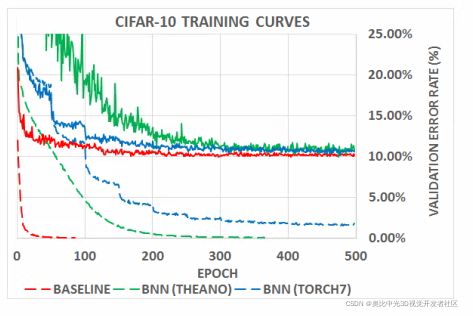
仅介绍在torch7中的实验设置,在训练过程中进行了"stochastically"的二值化,此外,还使用了基于位移的BN和AdaMax。下图是BNN的结果与32位浮点数的结果对比,具体可见蓝色虚线与红色虚线,蓝色虚线为在Torch7平台上的BNN训练情况,红色虚线为32位浮点训练的baseline,可以看到,BNN的损失下降是“阶梯性”的,且相比起baseline而言,训练的速度更慢,然而,最终所达到的精度却能够慢慢逼近32位浮点数的结果。
nni中的调用
NNI对这篇文章进行了复现,用户可以方便地进行调用实验,具体的调用代码为:
from nni.algorithms.compression.pytorch.quantization import BNNQuantizer
model = VGG_Cifar10(num_classes=10)
configure_list = [{
'quant_bits': 1,
'quant_types': ['weight'],
'op_types': ['Conv2d', 'Linear'],
'op_names': ['features.0', 'features.3', 'features.7', 'features.10', 'features.14', 'features.17', 'classifier.0', 'classifier.3']
}, {
'quant_bits': 1,
'quant_types': ['output'],
'op_types': ['Hardtanh'],
'op_names': ['features.6', 'features.9', 'features.13', 'features.16', 'features.20', 'classifier.2', 'classifier.5']
}]
quantizer = BNNQuantizer(model, configure_list)
model = quantizer.compress()
NNI对CIFAR-10上的VGGNet进行量化实验,最终达到的实验结果为:

结语
本文对BNN领域中的经典论文之一进行了简单的介绍,该论文提出了一种BNN的训练方法,且通过实验证明该方法可以得到近似于浮点数SOTA的结果,更为具体的细节推荐读者阅读原论文及代码。
参考文献
- Bengio, Yoshua. Estimating or propagating gradients through
stochastic neurons. Technical Report arXiv:1305.2982, Universite de Montreal, 2013. - nni 中的BNN官方介绍:https://nni.readthedocs.io/zh/stable/Compression/Quantizer.html
版权声明:本文为奥比中光3D视觉开发者社区特约作者授权原创发布,未经授权不得转载,本文仅做学术分享,版权归原作者所有,若涉及侵权内容请联系删文。
3D视觉开发者社区是由奥比中光给所有开发者打造的分享与交流平台,旨在将3D视觉技术开放给开发者。平台为开发者提供3D视觉领域免费课程、奥比中光独家资源与专业技术支持。点击加入3D视觉开发者社区,和开发者们一起讨论分享吧~
或可微信关注官方公众号 3D视觉开发者社区 ,获取更多干货知识哦。