Python 机器人学 —— 机械臂工作空间分析
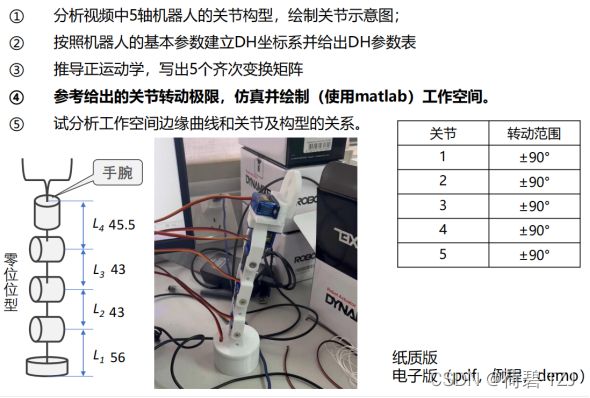
设关节1、关节5的高 (圆柱高) 分别为 ![]() ,5个关节的转动角分别为
,5个关节的转动角分别为 ![]()
可得出DH参数表:
| # |  |
 |
 |
 |
| 1 - 2 |  |
|||
| 2 - 3 |
|
|
||
| 3 - 4 |
|
|
||
| 4 - * |
|
|
||
| *- 5 |
|
|
||
| 5 - H |
|
|
|
因为把各个关节的坐标系位置都定在了圆柱的中心,所以需要考虑关节1、关节5的高度。其次,关节1在全局坐标系中的位置应为:![]()
根据5个关节的旋转角 + DH参数表,即可得到各个关节的坐标系,利用坐标系信息可完成图像的绘制
拟定义一个类,使其在输入5个关节的旋转角时,可完成绘制工作
环境设置
import matplotlib.pyplot as plt
import numpy as np
red = 'orangered'
orange = 'orange'
yellow = 'yellow'
green = 'greenyellow'
cyan = 'aqua'
blue = 'deepskyblue'
purple = 'mediumpurple'
pink = 'violet'
ROUND_EDGE = 30 # 圆等效多边形边数
ARRAY_TYPE = np.float # 矩阵使用的数据类型
COMMON_HEIGHT = 20
COMMON_RADIUS_OUT = 10
COMMON_RADIUS_IN = 3
# 三个相同关节的尺寸参数
CONNECT_ROD_RADIUS = COMMON_RADIUS_OUT / 3
# 连杆外径
JOINTS_SHAPE = [[COMMON_HEIGHT * 0.8, COMMON_RADIUS_IN * 2, COMMON_RADIUS_OUT, 'Wistia_r', 10],
[COMMON_RADIUS_OUT, COMMON_RADIUS_IN, COMMON_HEIGHT, 'cool', 2],
[COMMON_RADIUS_OUT, COMMON_RADIUS_IN, COMMON_HEIGHT, 'cool', 2],
[COMMON_RADIUS_OUT, COMMON_RADIUS_IN, COMMON_HEIGHT, 'cool', 2],
[None for _ in range(5)],
[COMMON_RADIUS_OUT * 0.8, COMMON_RADIUS_IN, COMMON_HEIGHT * 0.8, 'cool', 10]]
# 各个关节的尺寸参数
PACE_NUM = 20 # 转动范围分解步数
def DH_PARAM(theta):
''' DH 参数表'''
return [[theta[0], 56 - JOINTS_SHAPE[0][2] / 2, 0, 90], # 关节 1 -> 关节 2
[90 + theta[1], 0, 43, 0], # 关节 2 -> 关节 3
[theta[2], 0, 43, 0], # 关节 3 -> 关节 4
[-90 + theta[3], 0, 0, -90], # 关节 4 -> 关节 5
[theta[4], 45.5 - JOINTS_SHAPE[-1][2] / 2, 0, 0]]绘图函数
def figure3d():
''' 创建3d工作站'''
figure = plt.subplot(projection='3d')
figure.set_xlabel('x')
figure.set_ylabel('y')
figure.set_zlabel('z')
return figure
def plot_coord_sys(state, colors=[orange, yellow, pink],
labels='noa', linewidth=None, length=.5):
''' 绘制坐标系'''
pos = state[:3, -1]
for idx, (c, label) in enumerate(zip(colors, labels)):
axis = state[:3, idx] * length
plt.plot(*zip(pos, pos + axis), c=c, label=label, linewidth=linewidth)
def cylinder(figure, state, R, h, axis, r=0, smooth=2):
''' 绘制圆柱
figure: 3D工作站对象
state: 描述坐标系的四维方阵
R: 圆柱底面外径
r: 圆柱底面内径
h: 圆柱高度
axis: 圆柱两底面圆心连线所在的轴索引
smooth: 图像细致程度 (至少 2)
return: 可缓存函数'''
pos = state[:3, -1]
if axis == 0:
index = [0, 1, 2]
elif axis == 1:
index = [1, 0, 2]
else:
index = [2, 0, 1]
axis, r1, r2 = map(lambda i: state[:3, i], index)
# 主轴 + 两半径轴
function_io = []
# 函数流
theta = np.linspace(0, 2 * np.pi, ROUND_EDGE, dtype=ARRAY_TYPE)
height = np.linspace(-h / 2, h / 2, smooth, dtype=ARRAY_TYPE)
theta, height = np.meshgrid(theta, height)
# 角度、高度网格点
cos_theta = np.cos(theta, dtype=ARRAY_TYPE)
sin_theta = np.sin(theta, dtype=ARRAY_TYPE)
hook_points = lambda radius: map(lambda i: (r1[i] * cos_theta + r2[i] * sin_theta) * radius + pos[i] + height * axis[i], range(3))
out_ = hook_points(R)
function_io.append(lambda cmap: figure.plot_surface(*out_, cmap=cmap))
if r:
in_ = hook_points(r)
function_io.append(lambda cmap: figure.plot_surface(*in_, cmap=cmap))
# 绘制内外曲面
phi = np.linspace(0, 2 * np.pi, ROUND_EDGE, dtype=ARRAY_TYPE)
radius = np.linspace(r, R, 2, dtype=ARRAY_TYPE)
phi, radius = np.meshgrid(phi, radius)
cos_phi = np.cos(phi, dtype=ARRAY_TYPE) * radius
sin_phi = np.sin(phi, dtype=ARRAY_TYPE) * radius
sub_points = lambda height: map(lambda i: r1[i] * cos_phi + r2[i] * sin_phi + pos[i] + height * axis[i], range(3))
bottom = sub_points(-h / 2)
function_io.append(lambda cmap: figure.plot_surface(*bottom, cmap=cmap))
top = sub_points(h / 2)
function_io.append(lambda cmap: figure.plot_surface(*top, cmap=cmap))
# 绘制两底面
def execute(cmap):
for f in function_io:
f(cmap)
return execute齐次变换矩阵
def trans(dx, dy, dz):
''' 齐次变换矩阵: 平移'''
mat = np.eye(4, dtype=ARRAY_TYPE)
mat[:3, -1] += np.array([dx, dy, dz], dtype=ARRAY_TYPE)
return mat
def rot(theta, axis):
''' 齐次变换矩阵: 旋转'''
theta = theta / 180 * np.pi
# 角度 -> 弧度
sin = np.sin(theta)
cos = np.cos(theta)
mat = np.eye(4)
axis_idx = {'x': 0, 'y': 1, 'z': 2}
if isinstance(axis, str):
axis = axis_idx[axis]
# 字符 -> 空间轴名称
if axis == 0:
mat[1: 3, 1: 3] = np.array([[cos, -sin],
[sin, cos]], dtype=ARRAY_TYPE)
elif axis == 1:
mat[:3, :3] = np.array([[cos, 0, sin],
[0, 1, 0],
[-sin, 0, cos]], dtype=ARRAY_TYPE)
elif axis == 2:
mat[:2, :2] = np.array([[cos, -sin],
[sin, cos]], dtype=ARRAY_TYPE)
else:
raise AssertionError(f'axis: {axis_idx}')
return mat机械臂对象
每次工作状态改变时 (即机械臂运动),保存机械臂末端的点坐标,绘制成工作空间。在这个过程中,通过 numpy 判断新的工作点是否与旧的工作点重叠,并只保存不重叠的工作点
class Robot_Arm:
''' 机械臂对象'''
fig = figure3d()
state = np.eye(4, dtype=ARRAY_TYPE) @ trans(0, 0, JOINTS_SHAPE[0][2] / 2)
def __init__(self):
self.restart()
def restart(self):
''' 重启工作空间记录器'''
self.work_space = np.ones([0, 3])
def refresh(self, theta=[0] * 5):
''' 根据旋转角度刷新画面'''
joints = self.search(theta)
plt.cla()
# 清空画布
self.fig.view_init(elev=5, azim=-90)
for set_ in self.fig.set_xlim3d, self.fig.set_ylim3d:
set_(-150, 150)
self.fig.set_zlim3d(-50, 200)
plt.tight_layout()
# 设置 3D 工作站边界
for (R, r, h, cmap, smooth), joint in zip(JOINTS_SHAPE, joints):
if R:
cylinder(self.fig, joint, R=R, r=r, h=h, axis=2, smooth=smooth)(cmap)
plot_coord_sys(joint, linewidth=2, length=30)
# 绘制关节及其坐标系
for axis, length, rear in zip([1, 0, 0, None, 2], [56, 43, 43, 0, 45.5], joints[1:]):
if length:
move = -length / 2
connect_rod = rear @ trans(*map(lambda i: (axis == i) * move, range(3)))
cylinder(self.fig, connect_rod, CONNECT_ROD_RADIUS, length, axis=axis)('winter_r')
# 绘制连杆
tail = joints[-1] @ trans(0, 0, JOINTS_SHAPE[-1][2] / 2)
tail = tail[:3, -1].reshape(1, -1)
if np.all(((tail - self.work_space) ** 2).sum(axis=1) > 18):
self.work_space = np.append(self.work_space, tail, axis=0)
# 检测新工作点是否与旧工作点重叠
self.fig.scatter(*map(lambda i: self.work_space[:, i], range(3)), c=red, alpha=0.4, s=10)
plt.pause(0.001)
def search(self, theta):
''' 搜索关节的位置'''
joints = [self.state]
for rot_z, trans_z, trans_x, rot_x in DH_PARAM(theta):
last_joint = joints[-1]
cur_joint = last_joint @ rot(rot_z, axis='z') @ trans(trans_x, 0, trans_z) @ rot(rot_x, axis='x')
joints.append(cur_joint)
return joints工作空间绘制
def draw_work_space():
''' 工作空间绘制'''
out_points = []
in_points = []
for t in THETA:
theta = [0 for _ in range(5)]
theta[1] = t
arm.refresh(theta)
out_points.append(arm.work_space)
# 绘制外圆上半部分
for c in 90, -90:
arm.restart()
for t in THETA:
arm.refresh([0, c, t, 0, 0])
out_points.append(arm.work_space)
# 绘制外圆下半部分
for c in 90, -90:
arm.restart()
for t in THETA:
arm.refresh([0, c, c, t, 0])
out_points.append(arm.work_space)
# 绘制外圆中下部分
for c in 90, -90:
arm.restart()
for t in THETA:
arm.refresh([0, t, c, c, 0])
in_points.append(arm.work_space)
# 绘制内圆
arm.restart()
arm.refresh()
for line in out_points + in_points:
loc = list(map(lambda i: line[:, i], range(3)))
arm.fig.plot(*loc, c=red, linewidth=2, alpha=0.7)
arm.fig.scatter(*loc, c=red, alpha=0.4, s=10)
# 绘制轨迹
arm = Robot_Arm()
# 初始化机械臂
draw_work_space()
# 绘制工作空间
plt.pause(0)最终结果
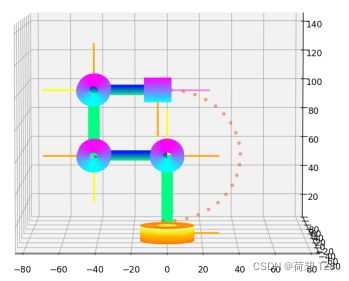
当5个关节的转动角均为0时,机械臂处在工作原点 (如下图所示)。对于这5个旋转关节而言,其z轴 (粉色轴) 均处在其右手规则旋转的方向上;其x轴 (橙色轴) 均处在其z轴与上一个关节的z轴的公垂线方向上,满足DH表示法的要求

当机械臂的5个转角分别为 [0, ![]() , 0, 0, 0] 时,其工作点分布在
, 0, 0, 0] 时,其工作点分布在 ![]() 的圆内
的圆内

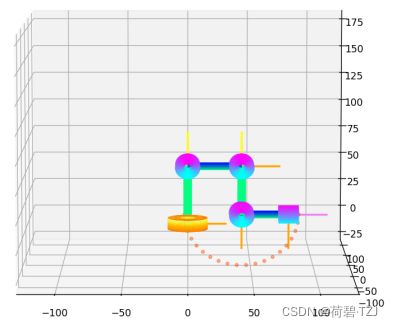
当机械臂的5个转角分别为 [0, ![]() , -90, -90, 0] 时,可绘制出如下工作点。取
, -90, -90, 0] 时,可绘制出如下工作点。取 ![]() 进行计算,半径
进行计算,半径 ![]()
当机械臂的5个转角分别为 [0, -90, ![]() , 0, 0] 时,其工作点分布在
, 0, 0] 时,其工作点分布在 ![]() 的圆内
的圆内

当机械臂的5个转角分别为 [0, -90, -90, ![]() , 0] 时,其工作点分布在
, 0] 时,其工作点分布在 ![]() 的圆内
的圆内
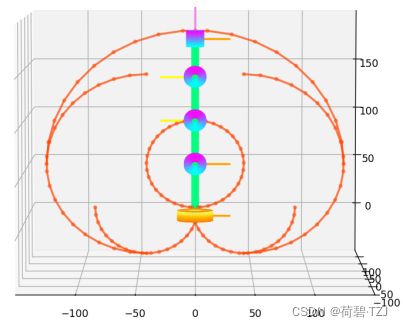
将所有范围叠加,得到工作空间的边界如下: