蓝桥杯STM32G431——PWM输入模式测量两路PWM频率和占空比
PWM输入模式测量两路PWM频率和占空比
- 测量PWM频率和占空比的时序图与步骤
-
- 时序图
- 测量占空比:PWM输入模式
- CubeMX的基础配置
- 测量PWM频率和占空比的编程
-
- pwm_tim.c文件
- main.c主函数的编写
测量PWM频率和占空比的时序图与步骤
时序图
测量占空比:PWM输入模式
内部原理图
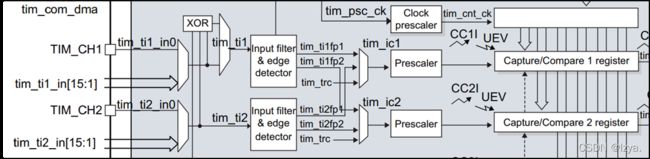
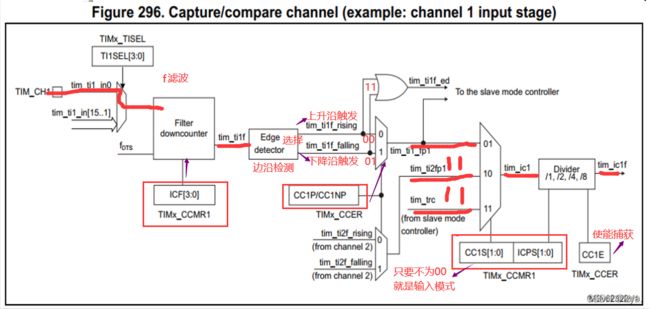
两个ICx信号被映射至同一个Tlx输入。
这2个ICx信号为边沿有效,但是极性相反。一个上升沿,一个下降沿
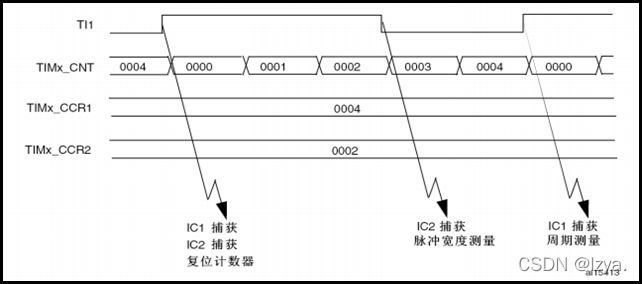
PWM输入模式下测量PWM频率和占空比的步骤:
1.PWM信号由TI1进入,配置T11FP1为触发信号,上升沿捕获。
2当上升沿的时候Ic1和ic2同时捕获,计数器CNT清零。
3.到了下降沿的时候,IC2捕获,此时计数器CNT的值被锁存到捕获寄存器CCR2中。
4.到了下一个上升沿的时候,lC1捕获,计数器CNT的值被锁存到捕获寄存器CCR1中。
5.其中CCR2测量的是脉宽,CCR1测量的是周期。
占空比=脉宽/周期
CubeMX的基础配置
在测量PWM输出频率CubeMX配置的基础之上对测量占空比中所需要的设置进行配置
参考上一篇文章蓝桥杯STM32G431——测量输入捕获PWM频率
相较于频率的测量,实际上只增加了一个通道二并且配置为非直接输入捕获模式和
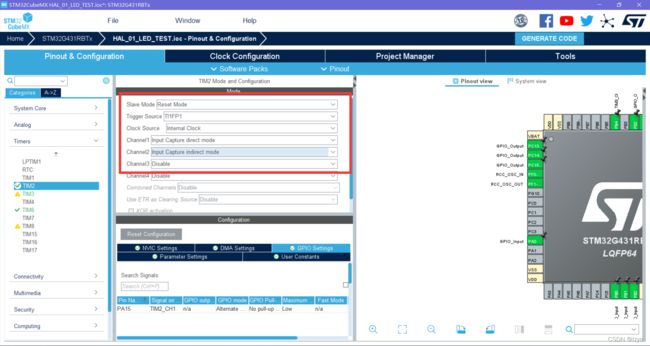
下降沿触发

输入捕获模式下同基本定时器一样需要打开定时器的中断配置中断回调函数实现功能
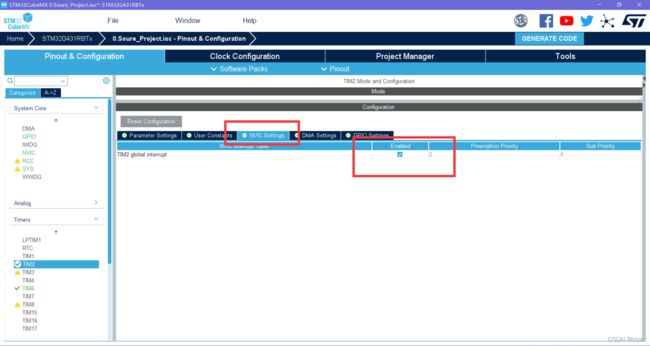
配置中断优先级
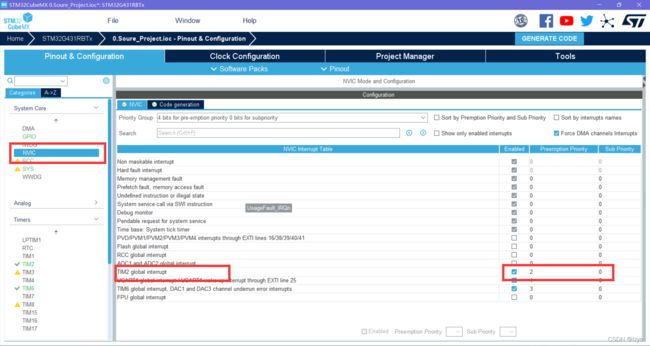
对定时器3的配置如图所示和定时器2相同完成配置即可
测量PWM频率和占空比的编程
pwm_tim.c文件
对测量PWM初始化函数的定时器2和定时器3进行了修改
#include "pwm_tim.h"
TIM_HandleTypeDef htim3;
TIM_HandleTypeDef htim2;
void PWM_TIM2_Init(void)
{
/* USER CODE BEGIN TIM2_Init 0 */
/* USER CODE END TIM2_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_SlaveConfigTypeDef sSlaveConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_IC_InitTypeDef sConfigIC = {0};
/* USER CODE BEGIN TIM2_Init 1 */
/* USER CODE END TIM2_Init 1 */
htim2.Instance = TIM2;
htim2.Init.Prescaler = 79;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 65535;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_IC_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sSlaveConfig.SlaveMode = TIM_SLAVEMODE_RESET;
sSlaveConfig.InputTrigger = TIM_TS_TI1FP1;
sSlaveConfig.TriggerPolarity = TIM_INPUTCHANNELPOLARITY_RISING;
sSlaveConfig.TriggerFilter = 0;
if (HAL_TIM_SlaveConfigSynchro(&htim2, &sSlaveConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_RISING;
sConfigIC.ICSelection = TIM_ICSELECTION_DIRECTTI;
sConfigIC.ICPrescaler = TIM_ICPSC_DIV1;
sConfigIC.ICFilter = 0;
if (HAL_TIM_IC_ConfigChannel(&htim2, &sConfigIC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_FALLING;
sConfigIC.ICSelection = TIM_ICSELECTION_INDIRECTTI;
if (HAL_TIM_IC_ConfigChannel(&htim2, &sConfigIC, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM2_Init 2 */
/* USER CODE END TIM2_Init 2 */
}
/* TIM3 init function */
void PWM_TIM3_Init(void)
{
/* USER CODE BEGIN TIM3_Init 0 */
/* USER CODE END TIM3_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_SlaveConfigTypeDef sSlaveConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_IC_InitTypeDef sConfigIC = {0};
/* USER CODE BEGIN TIM3_Init 1 */
/* USER CODE END TIM3_Init 1 */
htim3.Instance = TIM3;
htim3.Init.Prescaler = 79;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 65535;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim3, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_IC_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sSlaveConfig.SlaveMode = TIM_SLAVEMODE_RESET;
sSlaveConfig.InputTrigger = TIM_TS_TI1FP1;
sSlaveConfig.TriggerPolarity = TIM_INPUTCHANNELPOLARITY_FALLING;
sSlaveConfig.TriggerFilter = 0;
if (HAL_TIM_SlaveConfigSynchro(&htim3, &sSlaveConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_FALLING;
sConfigIC.ICSelection = TIM_ICSELECTION_DIRECTTI;
sConfigIC.ICPrescaler = TIM_ICPSC_DIV1;
sConfigIC.ICFilter = 0;
if (HAL_TIM_IC_ConfigChannel(&htim3, &sConfigIC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_RISING;
sConfigIC.ICSelection = TIM_ICSELECTION_INDIRECTTI;
if (HAL_TIM_IC_ConfigChannel(&htim3, &sConfigIC, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM3_Init 2 */
/* USER CODE END TIM3_Init 2 */
}
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* tim_baseHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(tim_baseHandle->Instance==TIM2)
{
/* TIM2 clock enable */
__HAL_RCC_TIM2_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**TIM2 GPIO Configuration
PA15 ------> TIM2_CH1
*/
GPIO_InitStruct.Pin = GPIO_PIN_15;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF1_TIM2;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* TIM2 interrupt Init */
HAL_NVIC_SetPriority(TIM2_IRQn, 3, 0);
HAL_NVIC_EnableIRQ(TIM2_IRQn);
}
else if(tim_baseHandle->Instance==TIM3)
{
/* TIM3 clock enable */
__HAL_RCC_TIM3_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/**TIM3 GPIO Configuration
PB4 ------> TIM3_CH1
*/
GPIO_InitStruct.Pin = GPIO_PIN_4;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF2_TIM3;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* TIM3 interrupt Init */
HAL_NVIC_SetPriority(TIM3_IRQn, 3, 0);
HAL_NVIC_EnableIRQ(TIM3_IRQn);
}
else if(tim_baseHandle->Instance==TIM6)
{
/* TIM6 clock enable */
__HAL_RCC_TIM6_CLK_ENABLE();
/* TIM6 interrupt Init */
HAL_NVIC_SetPriority(TIM6_DAC_IRQn, 2, 0);
HAL_NVIC_EnableIRQ(TIM6_DAC_IRQn);
}
}
main.c主函数的编写
#include "main.h"
#include "stdio.h"
#include "string.h"
#include "lcd.h"
#include "basic_tim6.h"
#include "pwm_tim.h"
//LCD变量
__IO uint32_t uwTick_LCD_State_Pointer; //控制LCD扫描时间
unsigned char Lcd_Disp_String[21];
uint8_t i;
//用于pwm回调函数中的变量
uint16_t pwm1_count_rise;
uint16_t pwm1_count_down;
uint16_t pwm2_count_rise;
uint16_t pwm2_count_down;
float duty1; //占空比
float duty2;
void SystemClock_Config(void);
void LCD_Proc(void);
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
HAL_Init();
/* Configure the system clock */
SystemClock_Config();
//**LCD初始化
LCD_Init();
LCD_Clear(Magenta);
LCD_SetBackColor(Magenta);
LCD_SetTextColor(Blue);
//基础定时器6的初始化
BASIC_TIM6_Init();
HAL_TIM_Base_Start_IT(&htim6);
//PWM初始化
PWM_TIM2_Init(); //定时器2初始化
HAL_TIM_Base_Start_IT(&htim2); //启动定时器2
HAL_TIM_IC_Start_IT(&htim2 , TIM_CHANNEL_1); //启动定时器2开启通道1输入捕获并开启中断
HAL_TIM_IC_Start_IT(&htim2 , TIM_CHANNEL_2); //启动定时器2开启通道2输入捕获并开启中断
PWM_TIM3_Init(); //定时器3初始化
HAL_TIM_Base_Start_IT(&htim3); //启动定时器3
HAL_TIM_IC_Start_IT(&htim3 , TIM_CHANNEL_1); //启动定时器3开启通道1输入捕获并开启中断
HAL_TIM_IC_Start_IT(&htim3 , TIM_CHANNEL_2); //启动定时器3开启通道2输入捕获并开启中断
while (1)
{
LCD_Proc();
}
}
void LCD_Proc(void)
{
if(uwTick-uwTick_LCD_State_Pointer<300) return;
uwTick_LCD_State_Pointer=uwTick;
memset(Lcd_Disp_String,0,sizeof(Lcd_Disp_String));
sprintf((char*)Lcd_Disp_String, " Timer6_Num : %03d" ,i);
LCD_DisplayStringLine(Line4, Lcd_Disp_String);
memset(Lcd_Disp_String,0,sizeof(Lcd_Disp_String));
sprintf((char*)Lcd_Disp_String, "pwm1:%4dHz,%5.2f%% ",(unsigned int)1000000/pwm1_count_rise,duty1*100); //频率值为1M/pwm_count 1M=1000000
LCD_DisplayStringLine(Line5, Lcd_Disp_String);
memset(Lcd_Disp_String,0,sizeof(Lcd_Disp_String));
sprintf((char*)Lcd_Disp_String, "pwm2:%4dHz,%5.2f%% ",(unsigned int)1000000/pwm2_count_rise,duty2*100);
LCD_DisplayStringLine(Line6, Lcd_Disp_String);
}
//定时器2和3输入捕获中断回调函数
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM2) //加判断语句用于判别是time2还是time3
{
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1) //通道1上升沿有效
{
pwm2_count_rise = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1)+1;
duty2=(float)pwm2_count_down/pwm2_count_rise; //在第二次上升沿触发时算出占空比为下降沿触发时的count/上升沿触发时的count
}
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_2) //通道2下降沿有效
{
pwm2_count_down = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_2)+1;
}
}
if(htim->Instance == TIM3) //对pwm1的处理同上相同
{
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
{
pwm1_count_rise = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1)+1;
duty1=(float)pwm1_count_down/pwm1_count_rise;
}
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_2)
{
pwm1_count_down = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_2)+1;
}
}
}
//基础定时器计数更新中断回调函数
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM6)
{
i++;
HAL_TIM_Base_Start_IT(&htim6);
}
}
/**
* @brief System Clock Configuration
` * @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = RCC_PLLM_DIV3;
RCC_OscInitStruct.PLL.PLLN = 20;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2;
RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
效果图展示为
