01 强化学习——策略梯度法(Policy Gradient PG)(离散动作)
一、来源和定位
1.1 PG算法在强化学习方法中的定位
策略梯度是基于策略搜索方法中最基础的方法,要理解AC,DDPG需要先学习策略梯度。
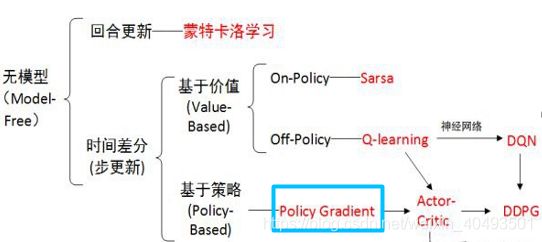
策略梯度方法就是将策略参数化,寻找最优的参数,使总体收益最大。关键在如何将策略参数化。
1.2 策略梯度直观理解
策略的表示
一般将策略表示为状态的函数:![]() ,
,
对于离散动作来说是一种随机分布:![]() ,随机策略参数化即为参数化这种分布。
,随机策略参数化即为参数化这种分布。
对于连续动作来说是随机高斯策略,用高斯策略来表示这种分布,参数化的方法为参数化高斯分布的均值和方差。
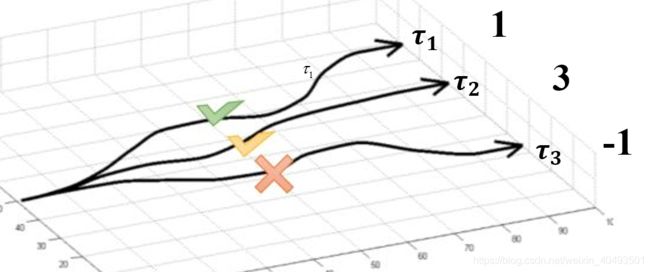
策略梯度是将智能体的策略转换成参数的非线性函数,通过寻优参数找到函数的最值,从而使回报值最大。如下图所示,假设有三条路径(每一条路径理解为一个策略 )回报分别为1,3,-1.最直观的做法是尽量选择第二条路径,即增加该策略的概率,使最终的回报最大。
)回报分别为1,3,-1.最直观的做法是尽量选择第二条路径,即增加该策略的概率,使最终的回报最大。
二、问题数学表示
2.1 误差
主要思想是使最终的回报最大,即一个完成的交互episode(从初始状态到最终状态的一个策略)。
目标:【一条完整的episode的回报期望最大】

要使该目标最大,则参数 的更新方向为梯度上升的方向。
的更新方向为梯度上升的方向。
![]()
此公式中有两点需要注意,第一是上式第三行的变换![]() ,该方法在梯度中经常使用,直接记住即可,第二是最后一等式的变换,
,该方法在梯度中经常使用,直接记住即可,第二是最后一等式的变换,![]() 是概率,与累加和可以看成是求后面部分的期望
是概率,与累加和可以看成是求后面部分的期望
策略产生的轨迹如下:![]() ,则该轨迹的概率可以用联合概率来表示:
,则该轨迹的概率可以用联合概率来表示:
注意上式中只有![]() 与有关,其他均无关,因此对其去对数并求导可以转化为:
与有关,其他均无关,因此对其去对数并求导可以转化为:
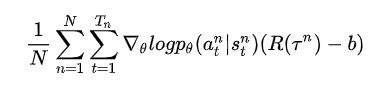
当采样了N条轨迹,(在程序中一条完整轨迹为一个episode),目标梯度可以用下面式子表示:
![]()
到此为止我们找到了误差的梯度,由此来构建神经网络的误差。
目标------>目标的梯度------>误差梯度------>误差------>编程实现

2.2 基线
在对动作进行采样时,无法保证每个动作都能抽取到,如果R都是正值,则每个动作的概率都会增大,对每抽取到的动作不公平,将上式减去一个值,保证其均值不变,梯度如下所示:
三、代码实现
3.1 源代码
import numpy as np
import tensorflow as tf
# reproducible
np.random.seed(1)
tf.set_random_seed(1)
class PolicyGradient:
def __init__(self,n_actions,n_features,learning_rate=0.01,reward_decay=0.95,output_graph=False,):
self.n_actions = n_actions
self.n_features = n_features
self.lr = learning_rate
self.gamma = reward_decay # 回报折扣因子
self.ep_obs, self.ep_as, self.ep_rs = [], [], []
self._build_net()
self.sess = tf.Session()
if output_graph:
# $ tensorboard --logdir=logs
# http://0.0.0.0:6006/
# tf.train.SummaryWriter soon be deprecated, use following
tf.summary.FileWriter("logs/", self.sess.graph)
self.sess.run(tf.global_variables_initializer())
def _build_net(self):
with tf.name_scope('inputs'):
self.tf_obs = tf.placeholder(tf.float32, [None, self.n_features], name="observations")
self.tf_acts = tf.placeholder(tf.int32, [None, ], name="actions_num")
self.tf_vt = tf.placeholder(tf.float32, [None, ], name="actions_value")
# fc1
layer = tf.layers.dense(
inputs=self.tf_obs,
units=10,
activation=tf.nn.tanh, # tanh activation
kernel_initializer=tf.random_normal_initializer(mean=0, stddev=0.3),
bias_initializer=tf.constant_initializer(0.1),
name='fc1'
)
# fc2
all_act = tf.layers.dense(
inputs=layer,
units=self.n_actions,
activation=None,
kernel_initializer=tf.random_normal_initializer(mean=0, stddev=0.3),
bias_initializer=tf.constant_initializer(0.1),
name='fc2'
)
self.all_act_prob = tf.nn.softmax(all_act, name='act_prob') # use softmax to convert to probability
with tf.name_scope('loss'):
# to maximize total reward (log_p * R) is to minimize -(log_p * R), and the tf only have minimize(loss)
neg_log_prob = tf.nn.sparse_softmax_cross_entropy_with_logits(logits=all_act, labels=self.tf_acts) # this is negative log of chosen action
# or in this way:
# neg_log_prob = tf.reduce_sum(-tf.log(self.all_act_prob)*tf.one_hot(self.tf_acts, self.n_actions), axis=1)
loss = tf.reduce_mean(neg_log_prob * self.tf_vt) # reward guided loss
with tf.name_scope('train'):
self.train_op = tf.train.AdamOptimizer(self.lr).minimize(loss)
def choose_action(self, observation):
prob_weights = self.sess.run(self.all_act_prob, feed_dict={self.tf_obs: observation[np.newaxis, :]})
action = np.random.choice(range(prob_weights.shape[1]), p=prob_weights.ravel()) # select action w.r.t the actions prob
return action
def store_transition(self, s, a, r):
self.ep_obs.append(s)
self.ep_as.append(a)
self.ep_rs.append(r)
def learn(self):
# discount and normalize episode reward
discounted_ep_rs_norm = self._discount_and_norm_rewards()
# train on episode
self.sess.run(self.train_op, feed_dict={
self.tf_obs: np.vstack(self.ep_obs), # shape=[None, n_obs]
self.tf_acts: np.array(self.ep_as), # shape=[None, ]
self.tf_vt: discounted_ep_rs_norm, # shape=[None, ]
})
self.ep_obs, self.ep_as, self.ep_rs = [], [], [] # empty episode data
return discounted_ep_rs_norm
def _discount_and_norm_rewards(self):
# discount episode rewards
discounted_ep_rs = np.zeros_like(self.ep_rs)
running_add = 0
for t in reversed(range(0, len(self.ep_rs))):
running_add = running_add * self.gamma + self.ep_rs[t]
discounted_ep_rs[t] = running_add
# normalize episode rewards # 注意此处将R_tao - b
discounted_ep_rs -= np.mean(discounted_ep_rs)
discounted_ep_rs /= np.std(discounted_ep_rs)
return discounted_ep_rs
import gym
# from RL_brain import PolicyGradient
import matplotlib.pyplot as plt
DISPLAY_REWARD_THRESHOLD = -2000 # renders environment if total episode reward is greater then this threshold
# episode: 154 reward: -10667
# episode: 387 reward: -2009
# episode: 489 reward: -1006
# episode: 628 reward: -502
RENDER = False # rendering wastes time
episode_num = 100
env = gym.make('MountainCar-v0')
env.seed(1) # reproducible, general Policy gradient has high variance
env = env.unwrapped
print(env.action_space)
print(env.observation_space)
print(env.observation_space.high)
print(env.observation_space.low)
RL = PolicyGradient(
n_actions=env.action_space.n,
n_features=env.observation_space.shape[0],
learning_rate=0.02,
reward_decay=0.995,
# output_graph=True,
)
for i_episode in range(episode_num):
observation = env.reset()
while True:
if RENDER: env.render()
action = RL.choose_action(observation)
observation_, reward, done, info = env.step(action) # reward = -1 in all cases
RL.store_transition(observation, action, reward)
if done:
# calculate running reward
ep_rs_sum = sum(RL.ep_rs)
if 'running_reward' not in globals():
running_reward = ep_rs_sum
else:
running_reward = running_reward * 0.99 + ep_rs_sum * 0.01
if running_reward > DISPLAY_REWARD_THRESHOLD: RENDER = True # rendering
print("episode:", i_episode, " reward:", int(running_reward))
vt = RL.learn() # train
if i_episode == 30:
plt.plot(vt) # plot the episode vt
plt.xlabel('episode steps')
plt.ylabel('normalized state-action value')
plt.show()
break
observation = observation_3.2 重点理解
neg_log_prob = tf.nn.sparse_softmax_cross_entropy_with_logits(logits=all_act, labels=self.tf_acts)
其中,all_act为网络的输出,self.tf_acts为标签的索引(比如第6个动作就是self.tf_acts=6)。
这个损失函数先把logits部分取sotfmax,之后又把label变为one-hot的形式并做Cross-Entropy,算完之后的结果就是第n个 的第t个state选择的action的negative log。
即:neg_log_prob= ![]() 。
。
再loss = tf.reduce_mean(neg_log_prob * self.tf_vt),得到:![]()