离散余弦变换滤波算法(DCT)
离散余弦变换滤波算法(DCT)
之前介绍的所有滤波算法都是空间域滤波算法(即2D滤波算法),今天来介绍一下频率域滤波算法,之后还会介绍时间域滤波算法(即3D滤波算法),敬请期待。
时间域相对于空间域增加了一个时间维度,可以对不同时间段的图像进行处理,对时域噪声有很好的抑制作用。而频率域又是一个全新的维度,换个角度看问题,将图像转换到频域,高频部分代表图像的细节、纹理信息,低频部分代表图像的轮廓信息,可以再特定的“频率”范围内对图像进行处理,就像是用显微镜看图像一样,能挖掘图像更加广阔的信息。
在图像处理中,图像为离散二维矩阵,所以算法都是离散形式。离散余弦变换是一种频率域转为到空间域的数学工具(函数),它为频率域与空间域架起一座桥梁。离散余弦变换是离散傅里叶变换(DFT)的一种特殊形式,特殊点就在于其原始变换信号是一个实偶函数。DCT变换较DFT变换具有更好的频域能量聚集度,那么对于那些不重要的频域区域和系数就能够直接裁剪掉,因此,DCT变换非常适合于图像压缩算法的处理,例如现在大名鼎鼎的jpeg就是使用了DCT作为图像压缩算法。

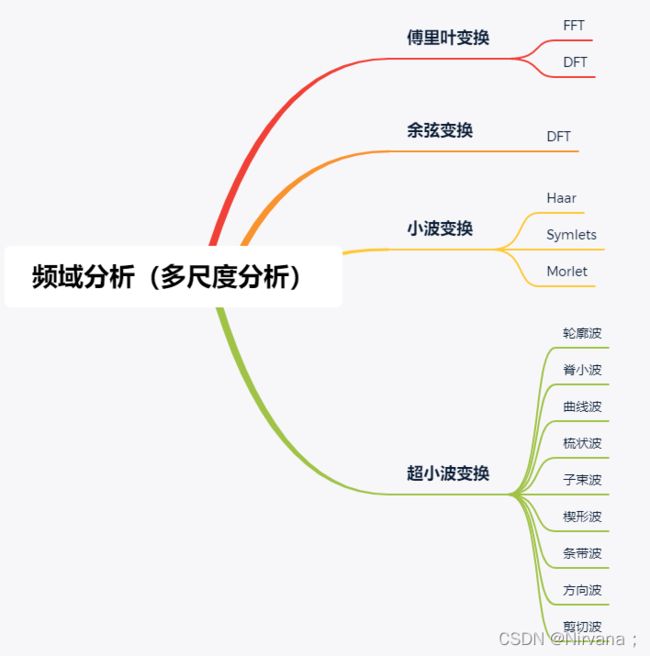
离散余弦变换,本质上是一种数学方法。它与傅立叶变换,小波变换,超小波变换,这些变换本质都是一种基变换,对于不同的系统,不同的研究对象,我们可以选取不同的基来让研究和分析变得更加简单。比如因为复指数信号是线性时不变系统的特征函数,因此我们在研究线性时不变系统及其特性时通常采用傅立叶变换,选取了一组好的基,可以让问题变得简单,比如我们的现在机器学习里很多的降维算法,像PCA,K-L变换也是基变换,对于一些基可能会出现很多很小的系数,或者是零系数,这要用这组基去表示这一信号或者向量时也就更加的简洁,而越是简洁就越于分析。
二维DCT变换公式如下:
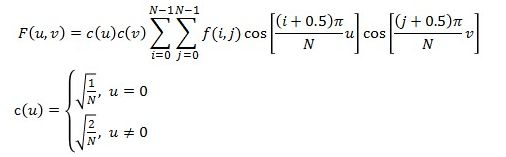
由公式我们可以看出,上面只讨论了二维图像数据为方阵的情况,在实际应用中,如果不是方阵的数据一般都是补齐之后再做变换的,重构之后可以去掉补齐的部分,得到原始的图像信息,这个尝试一下,应该比较容易理解
另外,由于DCT变换高度的对称性,在使用Matlab进行相关的运算时,我们可以使用更简单的矩阵处理方式:

DCT变换与IDCT变换,MATLAB代码实现:
clear;
clc;
% 正变换
X=round(rand(4)*100) %产生随机矩阵
A=zeros(4);
for i=0:3
for j=0:3
if i==0
a=sqrt(1/4);
else
a=sqrt(2/4);
end
A(i+1,j+1)=a*cos(pi*(j+0.5)*i/4);
end
end
Y=A*X*A' %DCT变换
%反变换
for i=0:3
for j=0:3
if i==0
a=sqrt(1/4);
else
a=sqrt(2/4);
end
A(i+1,j+1)=a*cos(pi*(j+0.5)*i/4); %生成变换矩阵
end
end
X1=A'*Y*A %DCT反变换恢复的矩阵
% Matlab版
YY=dct2(X) %Matlab自带的dct变换
XX=idct2(YY) %Matlab自带的idct逆变换
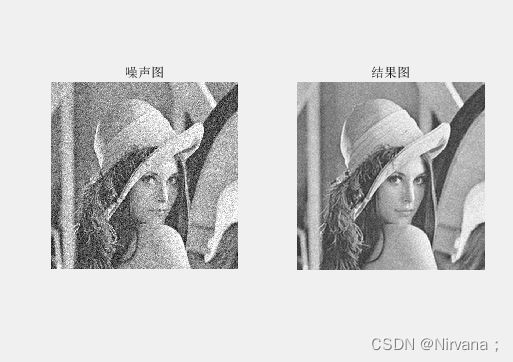
因为噪声主要存在于高频信息中,对高频信息进行适当抑制,可以起到图像去噪的作用,这里采用简单高频抑制方法,可以降噪但也会丢失细节,中间处理的方法还有很多就不一一列举,MATLAB代码如下:
%读取图像
X=imread('lena.jpg');
X=rgb2gray(X);
%读取图像尺寸
[m,n]=size(X);
%给图像加噪
Xnoised=imnoise(X,'gaussian',0.01);
%输出加噪图像
subplot(121);
imshow(Xnoised);
%DCT变换
Y=dct2(Xnoised);
I=zeros(m,n);
%高频抑制
I(1:m/3,1:n/3)=1;
Ydct=Y.*I;
%逆DCT变换
Y=uint8(idct2(Ydct));
%结果输出
subplot(122);
imshow(Y);
C++代码如下:
#include Python代码如下:
import cv2
import numpy as np
import matplotlib.pyplot as plt
# DCT hyoer-parameter 超参数
T = 8
K = 8
channel = 3
# DCT weight
def w(x, y, u, v):
cu = 1.
cv = 1.
if u == 0:
cu /= np.sqrt(2)
if v == 0:
cv /= np.sqrt(2)
theta = np.pi / (2 * T)
return (( 2 * cu * cv / T) * np.cos((2*x+1)*u*theta) * np.cos((2*y+1)*v*theta))
# DCT
def dct(img):
H, W, _ = img.shape
F = np.zeros((H, W, channel), dtype=np.float32)
for c in range(channel):
for yi in range(0, H, T):
for xi in range(0, W, T):
for v in range(T):
for u in range(T):
for y in range(T):
for x in range(T):
F[v+yi, u+xi, c] += img[y+yi, x+xi, c] * w(x,y,u,v)
return F
# IDCT
def idct(F):
H, W, _ = F.shape
out = np.zeros((H, W, channel), dtype=np.float32)
for c in range(channel):
for yi in range(0, H, T):
for xi in range(0, W, T):
for y in range(T):
for x in range(T):
for v in range(K):
for u in range(K):
out[y+yi, x+xi, c] += F[v+yi, u+xi, c] * w(x,y,u,v)
out = np.clip(out, 0, 255)
out = np.round(out).astype(np.uint8)
return out
# Read image
img = cv2.imread("imori.jpg").astype(np.float32)
# DCT
F = dct(img)
# IDCT
out = idct(F)
# Save result
cv2.imshow("result", out)
cv2.waitKey(0)
cv2.imwrite("out.jpg", out)