【Apollo 6.0学习笔记】Cyber RT API使用
文章目录
- 前言
- 一、Talker-Listener
-
- 1. create a node(创建节点)
- 2.Create a writer(创建编写器)
- 3. Create a reader(创建读取器)
- 4. 代码示例
- 二、Service Creation and Use
-
- Demo - Example (演示-示例)
- 1. Define request and response messages (定义请求和响应消息)
- 2. Create a service and a client (创建服务和客户端)
- 3. Bazel build file(构建文件)
- 三、Param parameter service
-
- 支持的数据类型
- 1. Creating the Parameter Object(创建参数对象)
- 2. Parameter Service(参数服务端)
- 3. Parameter Client(参数客户端)
- 4. Demo - example(演示-示例)
- 四、Log API(日志)
-
- 1. Log library(日志库)
- 2. Log configuration(日志配置)
- 3. Log initialization(日志初始化)
- 4. Log output macro(日志输出宏)
- 5. Log format(日志格式)
- 五、Building a module based on Component(基于组件构建模块)
-
- 1. 关键概念
-
- 1.1 Component(组件)
- 1.2 二进制VS组件
- 2. The essential Component interface(基本组件接口)
- 3. 使用组件的优点
- 4.Dag 文件格式
- 5. Demo - examples(演示-例子)
- 六. Launch(启动)
-
- 启动文件格式
- 七. Timer(定时器)
-
- 1. 启动定时器
- 2. 停止定时器
- 3. Demo - example(演示 - 示例)
- 4. 时间接口
- 八、Record file: Read and Write(录制文件:读取与写入)
-
- Demo - example(cyber/examples/record.cc)
- 九、 API Directory(API目录)
- 参考
前言
本文档对如何创建、操作和使用 Cyber RT 的 API 进行了广泛的技术深入探讨。
一、Talker-Listener
以Talker/Listener 为例,实例设计了三个基本的概念Node(基本单元)、Reader(读取消息的功能)、Writer(写入消息的功能)。
1. create a node(创建节点)
在CyberRT框架中,节点是最基本的单元,类似于的角色handle。创建特定的功能对象(编写器,读取器等)时,需要基于现有节点实例来创建它。
节点创建界面如下:
std::unique_ptr<Node> apollo::cyber::CreateNode(const std::string& node_name, const std::string& name_space = "");
参数:
- node_name:节点名称,全局唯一标识符
- name_space:节点所在空间的名称
- name_space默认为空。它是与node_name串联的空间的名称。格式为/namespace/node_name
返回值:
- 指向Node的专有智能指针。
错误条件:
- cyber::Init()未调用时,系统处于未初始化状态,无法创建节点,返回nullptr
2.Create a writer(创建编写器)
编写器是CyberRT中用于发送消息的基本工具。每个writer对应于具有特定数据类型的通道。编写器由CreateWriter节点类中的接口创建。
template <typename MessageT>
auto CreateWriter(const std::string& channel_name)
-> std::shared_ptr<Writer<MessageT>>;
template <typename MessageT>
auto CreateWriter(const proto::RoleAttributes& role_attr)
-> std::shared_ptr<Writer<MessageT>>;
参数:
- channel_name:要写入的通道的名称
- MessageT:要写出的消息类型
返回值:
- 指向Writer对象的共享指针
3. Create a reader(创建读取器)
这个reader是网络中用于接收消息的基本工具。创建reader时,必须将其绑定到回调函数。当新消息到达频道时,将调用回调。reader是由CreateReader节点类的接口创建的。
接口列表如下:
template <typename MessageT>
auto CreateReader(const std::string& channel_name, const std::function<void(const std::shared_ptr<MessageT>&)>& reader_func)
-> std::shared_ptr<Reader<MessageT>>;
template <typename MessageT>
auto CreateReader(const ReaderConfig& config,
const CallbackFunc<MessageT>& reader_func = nullptr)
-> std::shared_ptr<cyber::Reader<MessageT>>;
template <typename MessageT>
auto CreateReader(const proto::RoleAttributes& role_attr,
const CallbackFunc<MessageT>& reader_func = nullptr)
-> std::shared_ptr<cyber::Reader<MessageT>>;
参数:
- MessageT:要阅读的消息类型
- channel_name:要从中接收的频道的名称
- reader_func:处理消息的回调函数
返回值:
- 指向Reader对象的共享指针
4. 代码示例
Talker(cyber / examples / talker.cc)
#include "cyber/cyber.h"
#include "cyber/proto/chatter.pb.h"
#include "cyber/time/rate.h"
#include "cyber/time/time.h"
using apollo::cyber::Rate;
using apollo::cyber::Time;
using apollo::cyber::proto::Chatter;
int main(int argc, char *argv[]) {
// init cyber framework
apollo::cyber::Init(argv[0]);
// create talker node
std::shared_ptr<apollo::cyber::Node> talker_node(
apollo::cyber::CreateNode("talker"));
// create talker
auto talker = talker_node->CreateWriter<Chatter>("channel/chatter");
Rate rate(1.0);
while (apollo::cyber::OK()) {
static uint64_t seq = 0;
auto msg = std::make_shared<apollo::cyber::proto::Chatter>();
msg->set_timestamp(Time::Now().ToNanosecond());
msg->set_lidar_timestamp(Time::Now().ToNanosecond());
msg->set_seq(seq++);
msg->set_content("Hello, apollo!");
talker->Write(msg);
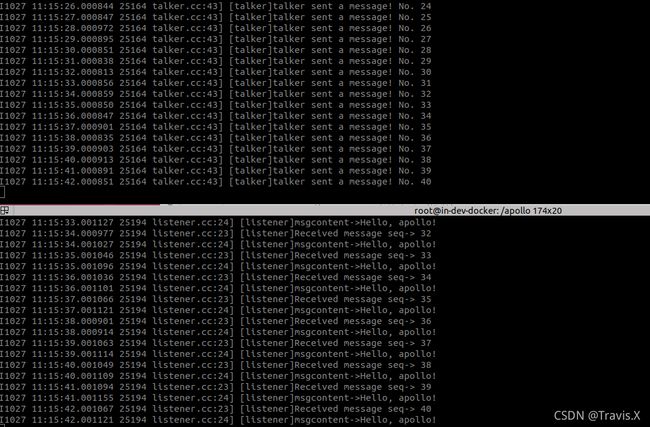
AINFO << "talker sent a message!";
rate.Sleep();
}
return 0;
}
Listener(cyber / examples / listener.cc)
#include "cyber/cyber.h"
#include "cyber/proto/chatter.pb.h"
void MessageCallback(
const std::shared_ptr<apollo::cyber::proto::Chatter>& msg) {
AINFO << "Received message seq-> " << msg->seq();
AINFO << "msgcontent->" << msg->content();
}
int main(int argc, char *argv[]) {
// init cyber framework
apollo::cyber::Init(argv[0]);
// create listener node
auto listener_node = apollo::cyber::CreateNode("listener");
// create listener
auto listener =
listener_node->CreateReader<apollo::cyber::proto::Chatter>(
"channel/chatter", MessageCallback);
apollo::cyber::WaitForShutdown();
return 0;
}
Bazel BUILD file(cyber/samples/BUILD)
cc_binary(
name = "talker",
srcs = [ "talker.cc", ],
deps = [
"//cyber",
"//cyber/examples/proto:examples_cc_proto",
],
)
cc_binary(
name = "listener",
srcs = [ "listener.cc", ],
deps = [
"//cyber",
"//cyber/examples/proto:examples_cc_proto",
],
)
- 构建和运行
bazel build cyber/examples/..
- 在不同的终端中运行Talker/LIstener:
export GLOG_alsologtostderr=1
./bazel-bin/cyber/examples/talker
export GLOG_alsologtostderr=1
./bazel-bin/cyber/examples/listener
- 终端打印结果
二、Service Creation and Use
在自动驾驶系统中,除了模块发送或接收消息外,还有很多场景需要模块通信。服务是节点之间的另一种通信方式。与信道不同,服务实现two-way通信,例如,节点通过发送请求获得响应。本节通过示例介绍CyberRT API 模块中的service。
Demo - Example (演示-示例)
问题:创建来回传递Driver.proto的客户端-服务器模型。当客户端发送请求时,服务器解析/处理该请求并返回响应。
该Demo演示的实现主要包括以下步骤。
1. Define request and response messages (定义请求和响应消息)
cyber中的所有消息均采用protobuf格式。任何带有序列化/反序列化接口的protobuf消息都可以用作服务请求和响应消息。Driver在examples.proto中用作本示例中的服务请求和响应:
// filename: examples.proto
syntax = "proto2";
package apollo.cyber.examples.proto;
message Driver {
optional string content = 1;
optional uint64 msg_id = 2;
optional uint64 timestamp = 3;
};
2. Create a service and a client (创建服务和客户端)
// filename: cyber/examples/service.cc
#include "cyber/cyber.h"
#include "cyber/examples/proto/examples.pb.h"
using apollo::cyber::examples::proto::Driver;
int main(int argc, char* argv[]) {
apollo::cyber::Init(argv[0]);
std::shared_ptr<apollo::cyber::Node> node(
apollo::cyber::CreateNode("start_node"));
auto server = node->CreateService<Driver, Driver>(
"test_server", [](const std::shared_ptr<Driver>& request,
std::shared_ptr<Driver>& response) {
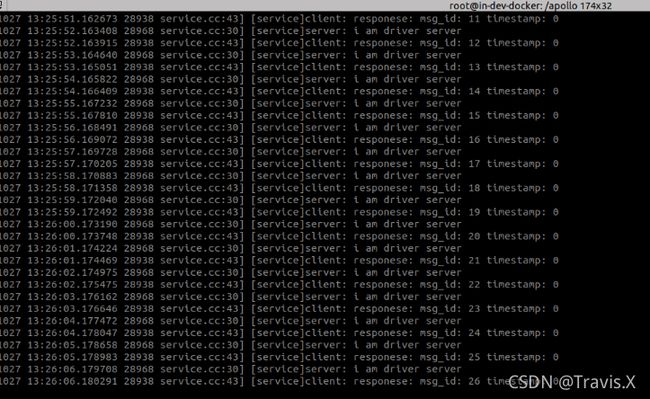
AINFO << "server: I am driver server";
static uint64_t id = 0;
++id;
response->set_msg_id(id);
response->set_timestamp(0);
});
auto client = node->CreateClient<Driver, Driver>("test_server");
auto driver_msg = std::make_shared<Driver>();
driver_msg->set_msg_id(0);
driver_msg->set_timestamp(0);
while (apollo::cyber::OK()) {
auto res = client->SendRequest(driver_msg);
if (res != nullptr) {
AINFO << "client: response: " << res->ShortDebugString();
} else {
AINFO << "client: service may not ready.";
}
sleep(1);
}
apollo::cyber::WaitForShutdown();
return 0;
}
3. Bazel build file(构建文件)
cc_binary(
name = "service",
srcs = [ "service.cc", ],
deps = [
"//cyber",
"//cyber/examples/proto:examples_cc_proto",
],
)
- 编译和运行
bazel build cyber/examples/..
终端中运行
export GLOG_alsologtostderr=1
./bazel-bin/cyber/examples/service
-
注意事项
注册服务时,请注意不允许重复的服务名称
注册服务器和客户端时应用的节点名称也不应重复 -
终端打印结果
三、Param parameter service
参数服务被用于节点之间共享的数据,并提供了诸如基本操作set,get和list。参数服务基于Service实现,并包含服务(service)和客户端(client)。
支持的数据类型
通过 cyber 传递的所有参数都是apollo::cyber::Parameter对象,下表列举了5种受支持的参数类型。
Parameter type | C++ data type | protobuf data type :————- | :————- | :————– apollo::cyber::proto::ParamType::INT | int64_t | int64 apollo::cyber::proto::ParamType::DOUBLE | double | double apollo::cyber::proto::ParamType::BOOL | bool |bool apollo::cyber::proto::ParamType::STRING | std::string | string apollo::cyber::proto::ParamType::PROTOBUF | std::string | string apollo::cyber::proto::ParamType::NOT_SET | - | -
除了上述5种类型外,Parameter还支持使用protobuf对象作为传入参数的接口。执行序列化后处理该对象,并将其转换为STRING类型以进行传输。
1. Creating the Parameter Object(创建参数对象)
支持的构造函数:
Parameter(); // Name is empty, type is NOT_SET
explicit Parameter(const Parameter& parameter);
explicit Parameter(const std::string& name); // type为NOT_SET
Parameter(const std::string& name, const bool bool_value);
Parameter(const std::string& name, const int int_value);
Parameter(const std::string& name, const int64_t int_value);
Parameter(const std::string& name, const float double_value);
Parameter(const std::string& name, const double double_value);
Parameter(const std::string& name, const std::string& string_value);
Parameter(const std::string& name, const char* string_value);
Parameter(const std::string& name, const std::string& msg_str,
const std::string& full_name, const std::string& proto_desc);
Parameter(const std::string& name, const google::protobuf::Message& msg);
使用Parameter对象的示例代码:
Parameter a("int", 10);
Parameter b("bool", true);
Parameter c("double", 0.1);
Parameter d("string", "cyber");
Parameter e("string", std::string("cyber"));
// proto message Chatter
Chatter chatter;
Parameter f("chatter", chatter);
std::string msg_str("");
chatter.SerializeToString(&msg_str);
std::string msg_desc("");
ProtobufFactory::GetDescriptorString(chatter, &msg_desc);
Parameter g("chatter", msg_str, Chatter::descriptor()->full_name(), msg_desc);
- 接口和数据读取
inline ParamType type() const;
inline std::string TypeName() const;
inline std::string Descriptor() const;
inline const std::string Name() const;
inline bool AsBool() const;
inline int64_t AsInt64() const;
inline double AsDouble() const;
inline const std::string AsString() const;
std::string DebugString() const;
template <typename Type>
typename std::enable_if<std::is_base_of<google::protobuf::Message, Type>::value, Type>::type
value() const;
template <typename Type>
typename std::enable_if<std::is_integral<Type>::value && !std::is_same<Type, bool>::value, Type>::type
value() const;
template <typename Type>
typename std::enable_if<std::is_floating_point<Type>::value, Type>::type
value() const;
template <typename Type>
typename std::enable_if<std::is_convertible<Type, std::string>::value, const std::string&>::type
value() const;
template <typename Type>
typename std::enable_if<std::is_same<Type, bool>::value, bool>::type
value() const;
如何使用这些接口的示例:
Parameter a("int", 10);
a.Name(); // return int
a.Type(); // return apollo::cyber::proto::ParamType::INT
a.TypeName(); // return string: INT
a.DebugString(); // return string: {name: "int", type: "INT", value: 10}
int x = a.AsInt64(); // x = 10
x = a.value<int64_t>(); // x = 10
x = a.AsString(); // Undefined behavior, error log prompt
f.TypeName(); // return string: chatter
auto chatter = f.value<Chatter>();
2. Parameter Service(参数服务端)
如果一个节点要向其他节点提供参数服务,则需要创建一个ParameterService。
/**
* @brief Construct a new ParameterService object
*
* @param node shared_ptr of the node handler
*/
explicit ParameterService(const std::shared_ptr<Node>& node);
由于所有参数都存储在参数服务对象中,因此可以直接在ParameterService中操纵参数,而无需发送服务请求。
- 设置参数:
/**
* @brief Set the Parameter object
*
* @param parameter parameter to be set
*/
void SetParameter(const Parameter& parameter);
- 获取参数:
/**
* @brief Get the Parameter object
*
* @param param_name
* @param parameter the pointer to store
* @return true
* @return false call service fail or timeout
*/Dreamview的使用
bool GetParameter(const std::string& param_name, Parameter* parameter);
- 获取参数列表:
/**
* @brief Get all the Parameter objects
*
* @param parameters pointer of vector to store all the parameters
* @return true
* @return false call service fail or timeout
*/
bool ListParameters(std::vector<Parameter>* parameters);
3. Parameter Client(参数客户端)
如果一个节点要使用其他节点的参数服务,则需要创建一个ParameterClient。
/**
* @brief Construct a new ParameterClient object
*
* @param node shared_ptr of the node handler
* @param service_node_name node name which provide a param services
*/
ParameterClient(const std::shared_ptr<Node>& node, const std::string& service_node_name);
您还可以执行SetParameter,GetParameter并ListParameters在“ 参数服务”下进行了提及。
4. Demo - example(演示-示例)
#include "cyber/cyber.h"
#include "cyber/parameter/parameter_client.h"
#include "cyber/parameter/parameter_server.h"
using apollo::cyber::Parameter;
using apollo::cyber::ParameterServer;
using apollo::cyber::ParameterClient;
int main(int argc, char** argv) {
apollo::cyber::Init(*argv);
std::shared_ptr<apollo::cyber::Node> node =
apollo::cyber::CreateNode("parameter");
auto param_server = std::make_shared<ParameterServer>(node);
auto param_client = std::make_shared<ParameterClient>(node, "parameter");
param_server->SetParameter(Parameter("int", 1));
Parameter parameter;
param_server->GetParameter("int", ¶meter);
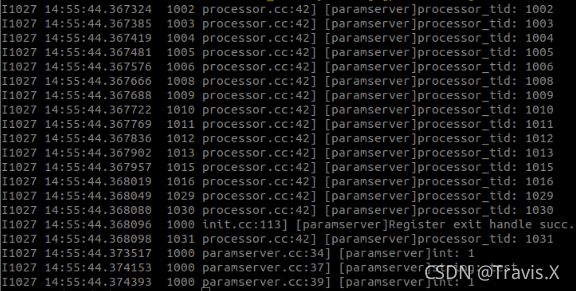
AINFO << "int: " << parameter.AsInt64();
param_client->SetParameter(Parameter("string", "test"));
param_client->GetParameter("string", ¶meter);
AINFO << "string: " << parameter.AsString();
param_client->GetParameter("int", ¶meter);
AINFO << "int: " << parameter.AsInt64();
return 0;
}
- 编译
bazel build cyber/examples/..
- 终端中运行
export GLOG_alsologtostderr=1
./bazel-bin/cyber/examples/paramserver
- 终端打印结果
四、Log API(日志)
1. Log library(日志库)
cyber 日志库建立在glog之上。需要包括以下头文件:
#include "cyber/common/log.h"
#include "cyber/init.h"
2. Log configuration(日志配置)
默认全局配置路径:cyber / setup.bash
以下配置可以由devloper修改:
export GLOG_log_dir=/apollo/data/log
export GLOG_alsologtostderr=0
export GLOG_colorlogtostderr=1
export GLOG_minloglevel=0
3. Log initialization(日志初始化)
在代码条目处调用Init方法以初始化日志:
apollo::cyber::cyber::Init(argv[0]) is initialized.
If no macro definition is made in the previous component, the corresponding log is printed to the binary log.
4. Log output macro(日志输出宏)
日志库封装在日志打印宏中。相关的日志宏的用法如下:
ADEBUG << "hello cyber.";
AINFO << "hello cyber.";
AWARN << "hello cyber.";
AERROR << "hello cyber.";
AFATAL << "hello cyber.";
5. Log format(日志格式)
格式为
<MODULE_NAME>.log.<LOG_LEVEL>.<datetime>.<process_id>
关于日志文件
当前,与默认glog唯一不同的输出行为是模块的不同日志级别将被写入同一日志文件。
五、Building a module based on Component(基于组件构建模块)
1. 关键概念
1.1 Component(组件)
该组件是Cyber RT提供的用于构建应用程序模块的基类。每个特定应用模块可以继承组件类和定义自己Init和Proc功能,因此它可以被加载到 Cyber 框架。
1.2 二进制VS组件
有两种选择可将Cyber RT框架用于应用程序:
-
基于二进制:将应用程序单独编译成二进制文件,通过创建自己的Reader和Writer与其他 cyber 模块进行通信。
-
基于组件:将应用程序编译到共享库中。通过继承Component类并编写相应的dag描述文件,Cyber
RT框架将动态加载和运行应用程序。
2. The essential Component interface(基本组件接口)
-
组件的Init()功能类似于执行算法初始化的主要功能。
-
组件的Proc()功能类似于阅读器的回调函数,该函数在消息到达时由框架调用。
3. 使用组件的优点
-
可以通过启动文件将组件加载到不同的进程中,并且部署非常灵活。
-
组件可以通过修改dag文件来更改接收到的通道名称,而无需重新编译。
-
组件支持接收多种类型的数据。
-
组件支持提供多种融合策略。
4.Dag 文件格式
dag文件示例:
# Define all coms in DAG streaming.
module_config {
module_library : "lib/libperception_component.so"
components {
class_name : "PerceptionComponent"
config {
name : "perception"
readers {
channel: "perception/channel_name"
}
}
}
timer_components {
class_name : "DriverComponent"
config {
name : "driver"
interval : 100
}
}
}
-
module_library:如果要加载.so库,根目录是cyber的工作目录(与.so相同的目录setup.bash)。
-
components&timer_component:选择需要加载的基本组件类类型。
-
class_name:要加载的组件类的名称。
-
name:加载的class_name作为加载示例的标识符。
-
readers:当前组件接收的数据,支持1-3个数据通道。
5. Demo - examples(演示-例子)
头文件定义(common_component_example.h)
#include Cpp文件实现(common_component_example.cc)
#include "cyber/examples/common_component_smaple/common_component_example.h"
#include "cyber/class_loader/class_loader.h"
#include "cyber/component/component.h"
bool Commontestcomponent::Init() {
AINFO << "Commontest component init";
return true;
}
bool Commontestcomponent::Proc(const std::shared_ptr<Driver>& msg0,
const std::shared_ptr<Driver>& msg1) {
AINFO << "Start commontest component Proc [" << msg0->msg_id() << "] ["
<< msg1->msg_id() << "]";
return true;
}
- 编译
bazel build cyber/examples/timer_component_smaple/..
- 运行
mainboard -d cyber/examples/timer_component_smaple/timer.dag
注意事项
需要注册组件才能通过SharedLibrary加载类。注册界面如下所示:
CYBER_REGISTER_COMPONENT(DriverComponent)
如果在注册时使用名称空间,则还需要在dag文件中定义名称空间时添加名称空间。
- Component和TimerComponent的配置文件不同,请注意不要混淆两者。
六. Launch(启动)
cyber_launch是Cyber RT框架的启动器,它根据启动文件启动多个mainboard,并根据dag文件将不同的组件加载到不同的mainboard中。cyber_launch支持两种方案,可在子进程中动态加载组件或启动二进制程序。
启动文件格式
<cyber>
<module>
<name>driver</name>
<dag_conf>driver.dag</dag_conf>
<process_name></process_name>
<exception_handler>exit</exception_handler>
</module>
<module>
<name>perception</name>
<dag_conf>perception.dag</dag_conf>
<process_name></process_name>
<exception_handler>respawn</exception_handler>
</module>
<module>
<name>planning</name>
<dag_conf>planning.dag</dag_conf>
<process_name></process_name>
</module>
</cyber>
模块:每个加载的组件或二进制文件都是一个模块
-
name是加载的模块名称
-
dag_conf是组件的相应dag文件的名称
-
process_name是mainboard进程启动的名称,process_name的相同组件将被加载并在同一进程中运行。
-
exception_handler是流程中发生异常时的处理程序方法。该值可以是下面列出的退出或重新生成。
-
exit,这意味着当当前进程异常退出时,整个进程需要停止运行。
-
respawn,异常退出后需要重新启动当前进程。可由用户根据过程的具体条件进行控制。
-
七. Timer(定时器)
可用于创建定时任务以定期运行或仅运行一次。
/**
* @brief Construct a new Timer object
*
* @param period The period of the timer, unit is ms
* @param callback The tasks that the timer needs to perform
* @param oneshot True: perform the callback only after the first timing cycle
* False: perform the callback every timed period
*/
Timer(uint32_t period, std::function<void()> callback, bool oneshot);
或者可以将参数封装到计时器选项中,如下所示:
struct TimerOption {
uint32_t period; // The period of the timer, unit is ms
std::function<void()> callback; // The tasks that the timer needs to perform
bool oneshot; // True: perform the callback only after the first timing cycle
// False: perform the callback every timed period
};
/**
* @brief Construct a new Timer object
*
* @param opt Timer option
*/
explicit Timer(TimerOption opt);
1. 启动定时器
创建 Timer 实例后,您必须调用Timer::Start()以启动计时器。
2. 停止定时器
当需要手动停止已经启动的定时器时,可以调用该Timer::Stop()接口。
3. Demo - example(演示 - 示例)
#include 4. 时间接口
Time是一个用来管理时间的类;可用于当前时间获取、耗时计算、时间转换等。
时间接口如下:
// constructor, passing in a different value to construct Time
Time(uint64_t nanoseconds); //uint64_t, in nanoseconds
Time(int nanoseconds); // int type, unit: nanoseconds
Time(double seconds); // double, in seconds
Time(uint32_t seconds, uint32_t nanoseconds);
// seconds seconds + nanoseconds nanoseconds
Static Time Now(); // Get the current time
Double ToSecond() const; // convert to seconds
Uint64_t ToNanosecond() const; // Convert to nanoseconds
Std::string ToString() const; // Convert to a string in the format "2018-07-10 20:21:51.123456789"
Bool IsZero() const; // Determine if the time is 0
代码示例如下:
#include 八、Record file: Read and Write(录制文件:读取与写入)
RecordReader是用于在网络框架中读取消息的组件。每个 RecordReader 都可以通过该Open方法打开一个已经存在的记录文件,线程会异步读取记录文件中的信息。用户只需在RecordReader中执行ReadMessage提取最新消息,然后通过GetCurrentMessageChannelName、GetCurrentRawMessage、GetCurrentMessageTime获取消息信息即可。
RecordWriter是用于在网络框架中记录消息的组件。每个 RecordWriter 都可以通过 Open 方法创建一个新的记录文件。用户只需要执行WriteMessage和WriteChannel即可写入消息和通道信息,写入过程是异步的。
Demo - example(cyber/examples/record.cc)
将 100 个 RawMessage 通过test_write方法写入TEST_FILE,然后通过方法将它们读出test_read。
#include - 构建
bazel build cyber/examples/..
- 运行
./bazel-bin/cyber/examples/record
- 测试结果
I1124 16:56:27.248200 15118 record.cc:64] [record] msg[0]-> channel name: /test/channel1; content: abc0; msg time: 888
I1124 16:56:27.248227 15118 record.cc:64] [record] msg[1]-> channel name: /test/channel1; content: abc1; msg time: 889
I1124 16:56:27.248239 15118 record.cc:64] [record] msg[2]-> channel name: /test/channel1; content: abc2; msg time: 890
I1124 16:56:27.248252 15118 record.cc:64] [record] msg[3]-> channel name: /test/channel1; content: abc3; msg time: 891
I1124 16:56:27.248297 15118 record.cc:64] [record] msg[4]-> channel name: /test/channel1; content: abc4; msg time: 892
I1124 16:56:27.248378 15118 record.cc:64] [record] msg[5]-> channel name: /test/channel1; content: abc5; msg time: 893
…
I1124 16:56:27.250422 15118 record.cc:73] [record] static msg=================
I1124 16:56:27.250434 15118 record.cc:74] [record] MSG validmsg:totalcount: 100:100
九、 API Directory(API目录)
查阅Cyber RT API tutorial
参考
Cyber RT API tutorial