【Apollo 6.0项目实战】Localization模块
文章目录
- 前言
-
- Apollo 6.0软件框架
- 一、MSF 定位模块简介
-
- 1.1 MSF 定位模块原理框架
- 1.2 MSF 定位模块的输入输出
- 二、多传感器融合定位实践
-
- 2.1 下载数据
- 2.2 参数配置
-
- 2.2.1 配置传感器外参
- 2.2.2 配置地图参数
- 2.3 启动 Apollo docker
- 三、 msf_visualizer 可视化工具
- 参考
前言
环境:
- Ubuntu 20.04
- Apollo 6.0
- LGSVL仿真器
Apollo 6.0软件框架

- Perception——感知模块识别自动驾驶汽车周围的环境。感知模块内部包含两个重要的子模块:障碍物检测和交通灯检测。
- Prediction——预测模块用来预测与感知障碍物未来的运动轨迹。
- Routing——路由模块告诉自动驾驶汽车通过全局路径到达目的地。
- Planning——规划模块规划自动驾驶汽车要采取的时空轨迹。
- Control——控制模块通过产生油门、刹车和转向等控制命令来执行计划的时空轨迹。
- CanBus —— CanBus 是将控制命令传递给车辆硬件的接口。它还将机箱信息传递给软件系统。
- HD-Map——该模块类似于库。它不是发布和订阅消息,而是经常用作查询引擎支持,以提供关于道路的特定结构化信息。
- Localization——定位模块利用各种信息源(如 GPS、LiDAR 和 IMU)来估计自动驾驶汽车的位置。
- HMI——Apollo 中的人机界面或 DreamView 是用于查看车辆状态、测试其他模块和实时控制车辆功能的模块。
- Monitor——车辆中所有模块的监控系统,包括硬件。
- Guardian——新的安全模块,用于干预监控检测到的失败和action center相应的功能。 执行操作中心功能并进行干预的新安全模块应监控检测故障。
- Storytelling——隔离和管理复杂场景的新模块,创建可触发多个模块操作的Story。所有其他模块都可以订阅此特定模块。
本文讲解的是 Apollo 中的 Localization 模块。当前, Apollo 提供的定位方案有三种,分别是 RTK(Real Time Kinematic)定位模块、MSF(Multi-Sensor Fusion)定位模块以及 NDT(Normal Distribution Transform)定位模块。本文中重点讲解的是MSF(Multi-Sensor Fusion)定位模块。
一、MSF 定位模块简介
高精度、高鲁棒性的定位系统是自动驾驶系统不可或缺的基础模块。定位模块的作用是为 planning 模块提供车辆的位置信息,以及为 control 模块提供车辆的姿态,速度信息。
MSF 定位模块结合 GPS + IMU + Lidar 实现的多传感器融合全局定位,利用多传感器优缺点的互补,实现高精度、高鲁棒性的定位能力。对于 GPS 失效或者 Lidar 地图环境变更场景具备一定的冗余处理能力。本模块可提供城市道路、高速、部分隧道等场景下的定位能力。
1.1 MSF 定位模块原理框架
MSF 定位系统以多种传感器数据和离线制作的高精度 Lidar 定位地图为输入,其中 GNSS Localization 模块以车端 GPS 信号和基站数据为输入,输出高精度 RTK 定位结果。LiDAR Localization 模块以在线 lidar 扫描数据和高精度 Lidar 定位地图为输入,提供高精度 lidar 定位结果。SINS 模块利用IMU数据进行惯性导航。后端采用 Error-state Kalman filter 融合多种传感器量测信息。最后输出高精度的车辆位置和姿态。
1.2 MSF 定位模块的输入输出
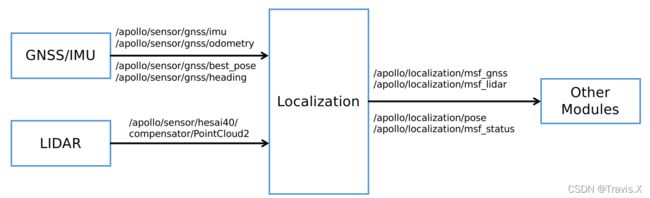
| channel名称 | 输入输出 | 说明 |
|---|---|---|
| /apollo/sensor/hesai40/compensator/PointCloud2 | 输入 | 融合后的点云数据 |
| /apollo/sensor/gnss/imu | 输入 | IMU 消息 |
| /apollo/sensor/gnss/odometry | 输入 | 里程计消息 |
| /apollo/sensor/gnss/best_pose | 输入 | GPS 位置 |
| /apollo/sensor/gnss/heading | 输入 | GPS 航向角 |
| /apollo/localization/msf_gnss | 输出 | GNSS 定位结果 |
| /apollo/localization/msf_lidar | 输出 | Lidar 定位结果 |
| /apollo/localization/pose | 输出 | 融合定位结果 |
| /apollo/localization/msf_status | 输出 | 融合定位状态 |
二、多传感器融合定位实践
本节利用数据集进行 msf 定位实践。
2.1 下载数据
终端上执行以下指令下载完整的定位数据集
# 下载数据集
wget https://apollo-system.cdn.bcebos.com/dataset/localization/demo-localization-data-3.5.tar.gz
# 解压数据集
tar -xvf demo-localization-data-apollo-3.5.tar.gz
解压数据集后会产生四个文件夹,分别为local_map(MSF Localization 定位地图)、ndt_map(NDT Localization 定位地图)、params(车辆参数)和 records(bag 数据)。
2.2 参数配置
为了使定位模块正确运行,需要对传感器外参和地图参数进行配置。
2.2.1 配置传感器外参
解压下载的数据集 params 文件夹下里包含两个文件夹 gnss_params 和 velodyne_params。
- gnss_params
- ant_imu_leverarm.yaml: # 杆臂值参数,GNSS 天线相对 Imu 的距离
- velodyne_params
- velodyne128_novatel_extrinsics.yaml: # Lidar 相对 Imu 的外参
- velodyne128_height.yaml: # LiDAR 相对于地面的高度
运行以下命令,拷贝车辆参数到定位模块目录下:
cp -r DATA_PATH/params/* /apollo/modules/localization/msf/params/
注意:DATA_PATH 代表定位数据集的路径。
2.2.2 配置地图参数
打开 /apollo/modules/localization/conf/localization.conf 文件并修改 --map_dir 字段:
# 使用 vim 打开 localization.conf
vim /apollo/modules/localization/conf/localization.conf
# 移动到第五行,修改 --map_dir 字段
--map_dir=DATA_PATH
2.3 启动 Apollo docker
cd apollo/
./docker/scripts/dev_start.sh
./docker/scripts/dev_into.sh
./scripts/bootstrap.sh
打开Dreamview http://localhost:8888/,在上方选择对应的模式、车型以及地图(根据自己的仿真环境选择相应的地图)。
cd DATA_PATH/records
cyber_recorder play -f record.*
注意:DATA_PATH 下载定位 demo 数据的路径。
正常显示如下

黑白的背景是地图,颜色表示环境中反射值:颜色越亮表示反射值越高,颜色越暗表示反射值越低,纯黑色表示没有被激光雷达扫描到的区域。
白色车辆模型表示经过 MSF 融合算法得到的位置坐标,蓝色方框表示 GPS 位置,可以在视频中看到蓝色方框在不停跳动,但车辆位置比较稳定,说明融合定位算法提供了更好的平滑性。
三、 msf_visualizer 可视化工具
按照官方教程对定位结果进行可视化,但是没有正常显示出来,弹出的窗口是黑屏和终端报错,目前尚未找到解决的方法,先将问题记录下来。
为 docker 配置 X-Server:
sudo apt install x11-xserver-utils
执行以下命令启动可视化工具:
cyber_launch start /apollo/modules/localization/launch/msf_visualizer.launch

而正常应该显示这样的结果
灰色背景表示地图,绿色细线表示原始点云数据,红色粗线圆圈表示 LiDAR 定位的置信度,绿色粗线圆圈表示 MSF 定位的置信度。
参考
【1】Apollo定位能力介绍