轨迹规划-动态规划DP和最短路径问题
1.简介
动态规划Dynamic Programming: 这里的“Programming”并非指编写程序代码,而是指一种表格计算法(A tabular method),即基于表格查询的方法计算得到最优结果。
动态规划与分治法(The Divide-and-Conquer Method)有些类似,也是将问题分解为多个子问题,并且基于子问题的结果获得最终解。二者的区别是,分治法将初始问题划分为多个不关联(Disjoint)的子问题(Subproblem)(即子问题相互之间互不依赖),递归地解决子问题,然后将子问题的解合并得到初始问题的解。与之相反,动态规划法分解得到的子问题是相互重叠的(Overlap),即子问题依赖于子子问题(Subsubproblem),子子问题又进一步依赖于下一级的子子问题,这样不断循环直至抵达不需分解的初始条件。在求解过程中,为了避免重复计算子子问题从而提高算法效率,需要将一系列子子问题的解保存到一张表中(table,C++编程一般使用std::array、std::vector或std::list实现),这也就是动态规划又被称为查表计算法的原因。
动态规划一般应用于最优化问题(Optimization Problems)。这类问题一般存在多个解,每个解都具有一个度量值,我们期望得到具有度量值最优(即取最大或最小值)的解。该最优解一般称为最优化问题的一个解。注意,这个解并非唯一,因为最优化问题可能存在多个最优解。
2.如何理解DP
2.1 举例说明,通俗易懂
先来看看生活中经常遇到的事吧——假设您是个土豪,身上带了足够的1、5、10、20、50、100元面值的钞票。现在您的目标是凑出某个金额w,需要用到尽量少的钞票。
依据生活经验,我们显然可以采取这样的策略:能用100的就尽量用100的,否则尽量用50的……依次类推。在这种策略下,666=6×100+1×50+1×10+1×5+1×1,共使用了10张钞票。
这种策略称为“贪心”:假设我们面对的局面是“需要凑出w”,贪心策略会尽快让w变得更小。能让w少100就尽量让它少100,这样我们接下来面对的局面就是凑出w-100。长期的生活经验表明,贪心策略是正确的。
但是,如果我们换一组钞票的面值,贪心策略就也许不成立了。如果一个奇葩国家的钞票面额分别是1、5、11,那么我们在凑出15的时候,贪心策略会出错:
15=1×11+4×1 (贪心策略使用了5张钞票)
15=3×5 (正确的策略,只用3张钞票)
为什么会这样呢?贪心策略错在了哪里?
鼠目寸光。
刚刚已经说过,贪心策略的纲领是:“尽量使接下来面对的w更小”。这样,贪心策略在w=15的局面时,会优先使用11来把w降到4;但是在这个问题中,凑出4的代价是很高的,必须使用4×1。如果使用了5,w会降为10,虽然没有4那么小,但是凑出10只需要两张5元。
在这里我们发现,贪心是一种只考虑眼前情况的策略。
那么,现在我们怎样才能避免鼠目寸光呢?
如果直接暴力枚举凑出w的方案,明显复杂度过高。太多种方法可以凑出w了,枚举它们的时间是不可承受的。我们现在来尝试找一下性质。
重新分析刚刚的例子。w=15时,我们如果取11,接下来就面对w=4的情况;如果取5,则接下来面对w=10的情况。我们发现这些问题都有相同的形式:“给定w,凑出w所用的最少钞票是多少张?”接下来,我们用f(n)来表示“凑出n所需的最少钞票数量”。
那么,如果我们取了11,最后的代价(用掉的钞票总数)是多少呢?
明显 什么是动态规划(Dynamic Programming)?动态规划的意义是什么? ,它的意义是:利用11来凑出15,付出的代价等于f(4)加上自己这一张钞票。现在我们暂时不管f(4)怎么求出来。
依次类推,马上可以知道:如果我们用5来凑出15,cost就算f(10) = 2+1=3.
那么,现在w=15的时候,我们该取那种钞票呢?当然是各种方案中,cost值最低的那一个!

显而易见,cost值最低的是取5的方案。我们通过上面三个式子,做出了正确的决策!
这给了我们一个至关重要的启示:
![]()
这个式子是非常激动人心的。我们要求出f(n),只需要求出几个更小的f值;既然如此,我们从小到大把所有的f(i)求出来不就好了?注意一下边界情况即可。代码如下:
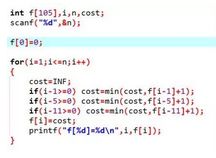
这两个事实,保证了我们做法的正确性。它比起贪心策略,会分别算出取1、5、11的代价,从而做出一个正确决策,这样就避免掉了“鼠目寸光”!
它与暴力的区别在哪里?我们的暴力枚举了“使用的硬币”,然而这属于冗余信息。我们要的是答案,根本不关心这个答案是怎么凑出来的。譬如,要求出f(15),只需要知道f(14),f(10),f(4)的值。其他信息并不需要。我们舍弃了冗余信息。我们只记录了对解决问题有帮助的信息——f(n).
我们能这样能这样做,主要取决于问题的性质:求出f(n),只需要知道几个更小的f©。我们将求解f©称作求解f(n)的“子问题”。
这就是DP(动态规划,dynamic programming):将一个问题拆成几个子问题,分别求解这些子问题,即可推断出大问题的解。
2.2 如何理解DP的几个重要性质
【无后效性】
一旦f(n)确定,“我们如何凑出f(n)”就再也用不着了。
要求出f(15),只需要知道f(14),f(10),f(4)的值,而f(14),f(10),f(4)是如何算出来的,对之后的问题没有影响。
“未来与过去无关”, 这就是 无后效性 。
(严格定义:如果给定某一阶段的状态,则在这一阶段以后过程的发展不受这阶段以前各段状态的影响。)
【最优子结构】
回顾我们对f(n)的定义:我们记“凑出n所需的最少钞票数量”为f(n).
f(n)的定义就已经蕴含了“最优”。 利用w=14,10,4的 最优 解,我们即可算出w=15的 最优 解。
大问题的最优解可以由小问题的最优解推出,这个性质叫做“最优子结构性质”。
2.3 如何判断一个问题能否使用DP解决呢?
能将大问题拆成几个小问题,且满足无后效性、最优子结构性质。
【DP的操作过程】
一言以蔽之:大事化小,小事化了。
将一个大问题转化成几个小问题;
求解小问题;
推出大问题的解。
【如何设计DP算法】
下面介绍比较通用的设计DP算法的步骤。
首先,把我们面对的局面表示为x。这一步称为设计状态。
对于状态x,记我们要求出的答案(e.g. 最小费用)为f(x).我们的目标是求出f(T).
找出f(x)与哪些局面有关(记为p),写出一个式子(称为状态转移方程),通过f(p)来推出f(x).
2.4 DP的典型应用:DAG最短路
有向无环图DAG(Directed acyclic graph): 如果一个有向图无法从某个顶点出发经过若干条边回到该点,则这个图是一个有向无环图。
求图中节点的单源最短路径可以使用Dijkstra,BellmanFord, 算法,而对于有向无环图DAG来说,可以通过简单的动态规划来进行求解。 DAG的独特之处是所有节点可以线性化(拓扑序列),使得所有边保持从左到右的方向.
问题很简单:给定一个城市的地图,所有的道路都是单行道,而且不会构成环。每条道路都有过路费,问您从S点到T点花费的最少费用。

边上的数字表示过路费。
这个问题能用DP解决吗?我们先试着记从S到P的最少费用为fp
想要到T,要么经过C,要么经过D。从而
![]()
好像看起来可以DP。现在我们检验刚刚那两个性质:
- 无后效性:对于点P,一旦f§确定,以后就只关心fp的值,不关心怎么去的。
- 最优子结构:对于P,我们当然只关心到P的最小费用,即fp。如果我们从S走到T是:

那肯定S走到Q的最优路径是:
对一条最优 的路径而言,从S走到 沿途上所有的点(子问题) 的最优路径,都是这条大路的一部分。这个问题的最优子结构性质是显然的。
既然这两个性质都满足,那么本题可以DP。 式子明显为:
![]()
2.5 扩展:最短路径算法
a.单源最短路径
从一个点出发,到达其他顶点的最短路径的长度。
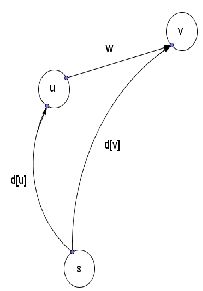
基本操作:**松弛**
d[u]+map[u, v]< d[v]这样的边(u,v)称为紧的(tense),可以对它进行松弛(relax):
d[v] = d[u]+w, pred[v] = u
最开始给每一个点一个很大的d值,从d[s]=0开始,不断的对可以松弛的点进行松弛,不能松弛的时候就已经求出了最短路了
b.Floyd算法
多源,基于动态规划,本质上是一个三维的DP, 与其他算法不同,floyd是一个多源最短路径算法,即经过 一次floyd后能求出任意两点间的最短路径
c.Dijkstra
单源,只适用于**无负边权**的图, 可以包含环
d. Bellman-ford算法
单源,基于动态规划, 边权可正可负, 可以包含环, 可以用来判负环
3. DP在Apollo项目规划模块中的应用
Apollo项目Planning模块的EMPlanner中使用动态规划生成代价(Cost)最小的多项式路径(DP路径,见Apollo项目中的DPRoadGraph类)和速度(DP速度,见Apollo项目中的DpStGraph类),DP路径算法和DP速度算法的示意性描述如下图所示
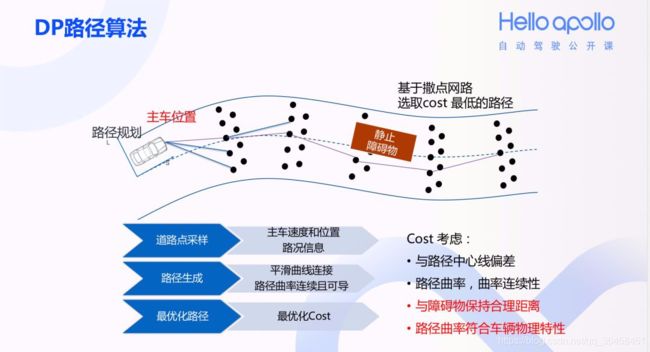
DP路径算法的基本思路是,基于给定的一条中心路径(称为参考线,ReferenceLine)和车道边界条件,每隔一定间隔的纵向距离(称为不同级(Level)上的s值)对道路截面进行均匀采样(与中心点的横向偏移值称为为l值),这样会得到图中黑点所示的采样点(这些采样点称为航点,Waypoint)数组。基于一定的规则,可以给出各航点迁移的代价值(Cost)。航点迁移不一定需要逐级进行,可以从第一级跳到第三级甚至终点,只要迁移代价值最小化即可,这显然满足动态规划的求解思路。
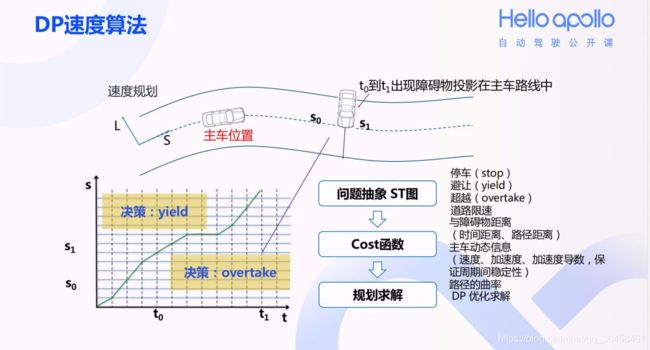
DP速度算法的基本思路是,在DP路径算法生成一条可行驶的路径后,从起点开始,考虑避开路径中的所有障碍物,并且让加减速最为平顺,以最优的速度曲线(即t-s平面中的绿色曲线)安全抵达终点,这也可以使用动态规划的思路求解。
参考文献:
算法-最短路径:DAG、Dijkstra、Bellman-Ford
什么是动态规划(Dynamic Programming)?动态规划的意义是什么?
动态规划及其在Apollo项目Planning模块的应用