yolov3--16--一文详解卷积操作中的padding填充操作
Yolov-1-TX2上用YOLOv3训练自己数据集的流程(VOC2007-TX2-GPU)
Yolov--2--一文全面了解深度学习性能优化加速引擎---TensorRT
Yolov--3--TensorRT中yolov3性能优化加速(基于caffe)
yolov-5-目标检测:YOLOv2算法原理详解
yolov--8--Tensorflow实现YOLO v3
yolov--9--YOLO v3的剪枝优化
yolov--10--目标检测模型的参数评估指标详解、概念解析
yolov--11--YOLO v3的原版训练记录、mAP、AP、recall、precision、time等评价指标计算
yolov--12--YOLOv3的原理深度剖析和关键点讲解
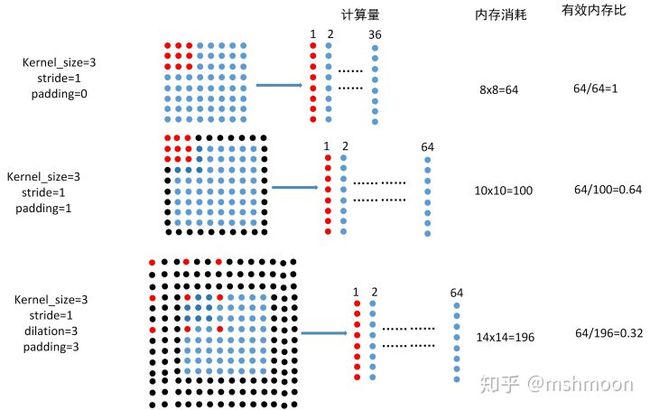
如上图所示:
第一行为普通3x3卷积,步长1,padding 0,
第二行为普通3x3卷积,步长1,padding 1,
第三行为膨胀3x3卷积,dilation rate=3,步长1,padding 3.
上图箭头右向所指,为cnn底层在caffe 和darknet的底层实现,用c或c++,至于pytorch和tensorflow 是否也是这样实现cnn我不清楚,但是目前来讲,有效实现卷积的也就3种方式,
im2col(上图) ,winograd, FFT,但是还是im2col比较常见,winograd好像是商汤最近几年提出来的,通过特殊数学计算方式,减少计算量,目前该方法被应用在腾讯移动端深度学习框架NCNN中,至于FFT,还没见到用在深度学习种。
至于为什么使用im2col,这还是贾清扬大神在写caffe时提出来的,因为图像中,一个块内的像素点在内存中是地址不连续的,所以对于同一个块内的像素想要缓存到cache上,可能出现多次内存访问,效率极低,所以设计出im2co方式,提前将需要计算的像素点放在连续地址上。
因此,对于同一图像,除了原始图像在内存中占空间,使用im2col又会消耗另一份空间。
如上图所示,对于8x8的图像:
不加padding,计算量为9x36=324, 内存消耗为8x8=64,有效内存为64/64=1
加padding=1,计算量为9x64=572,内存消耗为10x10=100,有效内存为64/100=0.64
加dilation_rate=3,padding=1,计算量为9x64=572,内存消耗为14x14=196,有效内存为64/196=0.32
在上图中可见,
添加padding=1就可对内存造成1-0.64=0.36的内存损失,当使用dilation_rate=3时,内存损失为1-0.32=0.68
假如,我们为存储图像分配1个G大小空间,为使用im2col后的图像在分配1个G大小的空间,当我们使用dilation_rate=3之后,有效内存,也就是真正的像素所占的内存仅仅为2x0.32=0.64G。
以上例子为当图像或是特征大小为8x8的情况,假设我们的图像或是特征大小为100x100
那么使用dilation_rate=3,有效内存占比为(100x100)/(106x106)=0.88,有效内存还是挺客观的。
对于8x8的如此小的特征,在我们的网络中一般都出现在网络的深层,而对于100x100的特征,在我们的网络中一般都出现在网络的浅层。因此在网络不同的层中,合理使用dilation,
可以更高效的使用我们的内存。
在valid情况下, 输出形状计算方法为: new_height=new_width=[(W-F)/S+1]
在same情况下,输出形状计算方法为: new_height=new_width=[W/S]
其中W为输入的尺寸,F为滤波器尺寸,S为步长,[ ]为向上取整函数。
由上可知,如果要保持卷积或池化之后的图像尺寸不变,则步长S必须为1。
卷积padding的补0策略
作为最基础的卷积层——CNN,我们应当对他最为熟悉。但是在实现的时候,忽然发现对于其第一步骤,就有困惑的地方,那就是padding,也就是补0策略。
在Keras中,卷积层的定义是如下:
keras.layers.convolutional.Conv1D(filters, kernel_size, strides=1, padding='valid', dilation_rate=1, activation=None, use_bias=True, kernel_initializer='glorot_uniform', bias_initializer='zeros', kernel_regularizer=None, bias_regularizer=None, activity_regularizer=None, kernel_constraint=None, bias_constraint=None)可以看到padding是一个参数,它有可选值,根据官方文档说明,它总共包含3种可选值:’valid’,’same’和‘casual’.那么这每个意思也进行了描述,但是具体如何操作呢?
“valid”代表只进行有效的卷积,即对边界数据不处理。这个是非常容易理解的,即不进行补0,能有多少卷积就有多少卷积,但是会抛弃一些数据,而且每次总是最后的数字被抛弃。这也可能造成右边界数据没有顾忌到的缺陷。
例如,一个序列有13长,我们的kernel_size为6,步长为5,那么采用valid的补0策略的卷积后的大小为2,即

“same”代表进行补0卷积,但是它的补0也是有上限的,它的第一步卷积补0为kernel_size-strides,然后到最后剩多少补多少0,如果采用same补0策略的卷积,那么上面例子中的卷积后大小为3,即
“casual”则是代表具有时序关系的卷积,即output[t]不依赖于input[t+1:]。当对不能违反时间顺序的时序信号建模时有用。一般不使用这种。
总结:如果卷积的方式选择为same,那么卷积操作的输入和输出尺寸会保持一致。如果选择valid,那卷积过后,尺寸会变小。
一个例子
比如输入图片是28*28的单通道图片,其输入shape为[batch_size, 28, 28, 1];
-
第一层卷积为
32个5*5卷积核,其shape为[5,5,1,32],其步长strides为[1,1,1,1],紧接着是第一层的2*2的max_pooling,其形状为[1,2,2,1],其步长strides为[1,2,2,1]; -
第二层卷积为
64个5*5卷积核,其shape为[5,5,32,64],其步长strides为[1,1,1,1],紧接着是第一层的2*2的max_pooling,其形状为[1,2,2,1],其步长strides为[1,2,2,1]; -
padding全部使用SAME;
那么图像的尺寸经过以上两次卷积,两次池化后的变化如下: [batch_size, 28, 28, 1]
↓ (第一层卷积)[batch_size, 28, 28, 32]
↓ (第一层池化)[batch_size, 14, 14, 32]
↓ (第二层卷积)[batch_size, 14, 14, 64]
↓ (第二层池化)[batch_size, 7, 7, 64]
如果上述所有的卷积核,池化核以及步长都保持不变,但是全部使用VALID模式,那么尺寸变化如下:[batch_size, 28, 28, 1]
↓ (第一层卷积)[batch_size, 24, 24, 32]
↓ (第一层池化)[batch_size, 12, 12, 32]
↓ (第二层卷积)[batch_size, 8, 8, 64]
↓ (第二层池化)[batch_size, 4, 4, 64]
例子:
W = tf.truncated_normal([5, 5, 1, 32], stddev=0.1)
tf.nn.conv2d(x, W, strides=[1, 2, 2, 1], padding='SAME')1、shape= [5,5,1,32]
前面两个5,表示卷积核的长宽分别为5
1表示输入图像对应的通道数,比如输入的图像是单通道的则设置为1,如果是RGB三通道的,则设置为3
32表示卷积核的个数,对应输出32张图
2、strides=[1, 2, 2, 1]
四个元素规定前后必须为1,中间两个数表示水平滑动和垂直滑动步长值
3、padding='SAME'SAME表示在扫描的时候,如果遇到卷积核比剩下的元素要大时,这个时候需要补0进行最后一次的行扫描或者列扫描
在卷积核移动逐渐扫描整体图时候,因为步长的设置问题,可能导致剩下未扫描的空间不足以提供给卷积核的
4、比如有图大小为5*5,卷积核为2*2,步长为2,卷积核扫描了两次后,剩下一个元素,不够卷积核扫描了,这个时候就在后面补零,补完后满足卷积核的扫描,这种方式就是same。如果说把刚才不足以扫描的元素位置抛弃掉,就是valid方式。
若加微信请备注下姓名_公司/学校,相遇即缘分,感谢您的支持,愿真诚交流,共同进步,谢谢~

https://blog.csdn.net/oMoDao1/article/details/84994437
https://zhuanlan.zhihu.com/p/66289618
https://blog.csdn.net/qq_35082030/article/details/80079563
https://blog.csdn.net/u011304078/article/details/83537514