计算机视觉(二)特征提取与匹配
文章目录
-
- 一、Harris角点检测
-
- 1.1 基本思想
- 1.2 代码实现
- 二、SIFT(尺度不变特征变换)
-
- 2.1 基本思想
- 2.2 代码实现
一、Harris角点检测
1.1 基本思想
HARRIS角点检测,就是从图像局部的小窗口观察图像特征,在某点划个n*n大小的窗口,让它在各个方向上移动,如果每个点都会导致灰度值有较大的变化,那么这个点就是角点。数学表达式为:

对I(x+u,y+v)进行二维泰勒级数展开,取一阶近似,最后变为求解矩阵:
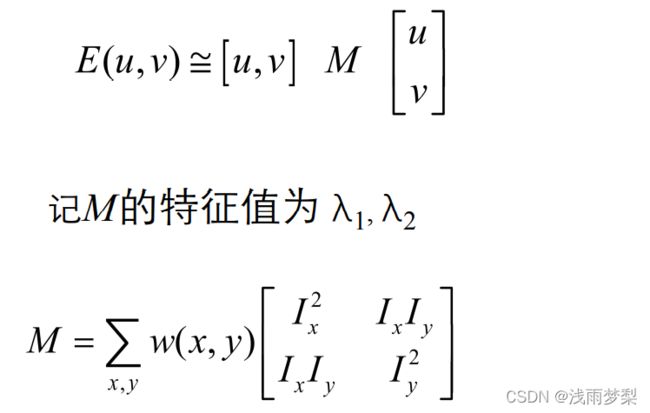
根据矩阵M的特征值可以知道这个点是否是角点。

在不需要实际计算特征值的情况下,为了把重要的情况和其他情况分开,Harris和Stephens在文献中引入了指示函数R:
其中,
![]()

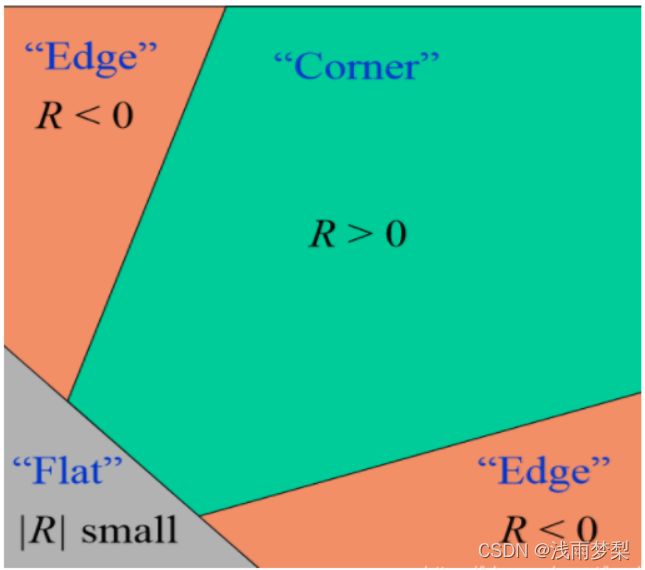
最终用下面这张图判断图像的角点
1.2 代码实现
算法流程:
1.将图像转为灰度图像
2.利用Sobel滤波器求出 海森矩阵 (Hessian matrix)


3.将高斯滤波器分别作用于Ix²、Iy²、IxIy;
4.计算每个像素的 R= det(H) - k(trace(H))²。det(H)表示矩阵H的行列式,trace表示矩阵H的迹。通常k的取值范围为[0.04,0.16]。
5.满足 R>=max® * th 的像素点即为角点。th常取0.1。
import cv2 as cv
import numpy as np
import matplotlib.pyplot as plt
# Harris corner detection
def Harris_corner(img):
## Grayscale
def BGR2GRAY(img):
gray=cv.cvtColor(img,cv.COLOR_BGR2GRAY)
gray = gray.astype(np.uint8)
return gray
## Sobel
def Sobel_filtering(gray):
# get shape
H, W = gray.shape
# sobel kernel
sobely = np.array(((1, 2, 1),
(0, 0, 0),
(-1, -2, -1)), dtype=np.float32)
sobelx = np.array(((1, 0, -1),
(2, 0, -2),
(1, 0, -1)), dtype=np.float32)
# padding
tmp = np.pad(gray, (1, 1), 'edge')
# prepare
Ix = np.zeros_like(gray, dtype=np.float32)
Iy = np.zeros_like(gray, dtype=np.float32)
# get differential
for y in range(H):
for x in range(W):
Ix[y, x] = np.mean(tmp[y: y + 3, x: x + 3] * sobelx)
Iy[y, x] = np.mean(tmp[y: y + 3, x: x + 3] * sobely)
Ix2 = Ix ** 2
Iy2 = Iy ** 2
Ixy = Ix * Iy
return Ix2, Iy2, Ixy
# gaussian filtering
def gaussian_filtering(I, K_size=3, sigma=3):
# get shape
H, W = I.shape
## gaussian
I_t = np.pad(I, (K_size // 2, K_size // 2), 'edge')
# gaussian kernel
K = np.zeros((K_size, K_size), dtype=np.float)
for x in range(K_size):
for y in range(K_size):
_x = x - K_size // 2
_y = y - K_size // 2
K[y, x] = np.exp(-(_x ** 2 + _y ** 2) / (2 * (sigma ** 2)))
K /= (sigma * np.sqrt(2 * np.pi))
K /= K.sum()
# filtering
for y in range(H):
for x in range(W):
I[y, x] = np.sum(I_t[y: y + K_size, x: x + K_size] * K)
return I
# corner detect
def corner_detect(gray, Ix2, Iy2, Ixy, k=0.04, th=0.1):
# prepare output image
out = np.array((gray, gray, gray))
out = np.transpose(out, (1, 2, 0))
# get R
R = (Ix2 * Iy2 - Ixy ** 2) - k * ((Ix2 + Iy2) ** 2)
# detect corner
out[R >= np.max(R) * th] = [255, 0, 0]
out = out.astype(np.uint8)
return out
# 1. grayscale
gray = BGR2GRAY(img)
# 2. get difference image
Ix2, Iy2, Ixy = Sobel_filtering(gray)
# 3. gaussian filtering
Ix2 = gaussian_filtering(Ix2, K_size=3, sigma=3)
Iy2 = gaussian_filtering(Iy2, K_size=3, sigma=3)
Ixy = gaussian_filtering(Ixy, K_size=3, sigma=3)
# 4. corner detect
out = corner_detect(gray, Ix2, Iy2, Ixy)
return out
# Read image
img = cv.imread("E:/CV/images/6.jpg")
img = cv.resize(img, (800, 600), interpolation=cv.INTER_CUBIC)
img.astype(np.float32)
# Harris corner detection
out = Harris_corner(img)
cv.imshow("result", out)
cv.waitKey(0)
cv.destroyAllWindows()
运行结果如下:
二、SIFT(尺度不变特征变换)
2.1 基本思想
SIFT特征不只具有尺度不变性,即使改变旋转角度,图像亮度或拍摄视角,仍然能够得到好的检测效果。

SIFT特征检测主要有四个步骤:
1、尺度空间的极值检测
2、特征点定位
3、特征方向赋值
4、特征点描述
关于尺度空间:
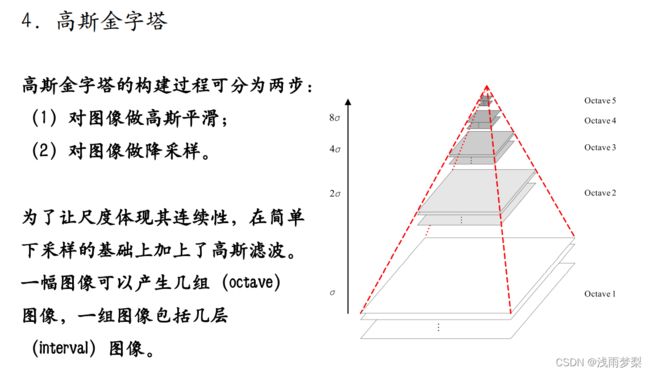
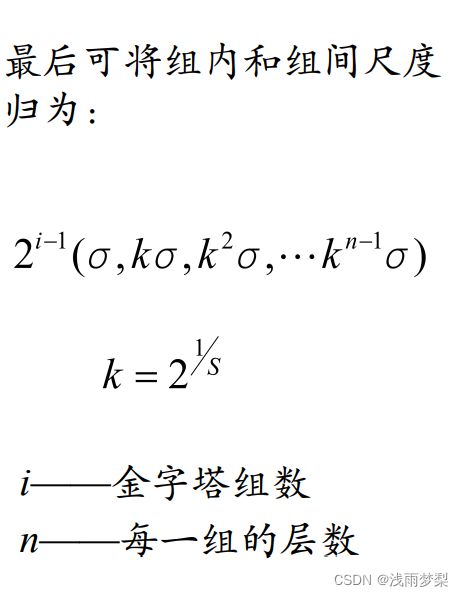
在早期图像的多尺度通常使用图像金字塔表示形式。图像金字塔是同一图像在不同的分辨率下得到的一组结果,其生成过程一般包括两个步骤:
1、对原始图像进行平滑
2、对处理后的图像进行降采样
高斯尺度空间:
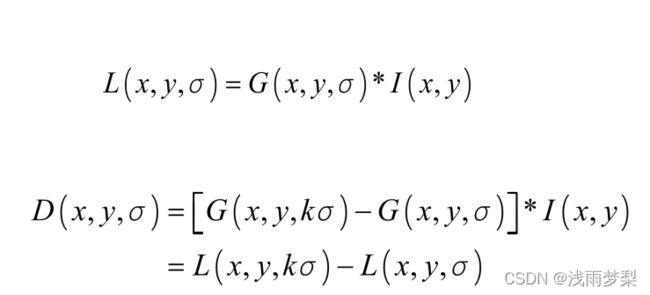
一副图像其高斯尺度空间可由其和不同的高斯卷积得到:
L ( x , y , σ ) = G ( x , y , σ ) ∗ I ( x , y ) \ L(x,y,σ)=G(x,y,σ)∗I(x,y)
其中, G ( x , y , σ ) \ G(x,y,σ) G(x,y,σ) 是高斯核函数
构建尺度空间的目的是为了检测出在不同的尺度下都存在的特征点,而检测特征点较好的算子是 
使用LoG虽然能较好的检测到图像中的特征点,但是其运算量过大,通常可使用DoG(差分高斯,Difference of Gaussina)来近似计算LoG[Marr and Hidreth]。
DoG

设k为相邻两个高斯尺度空间的比例因子,则DoG的定义:
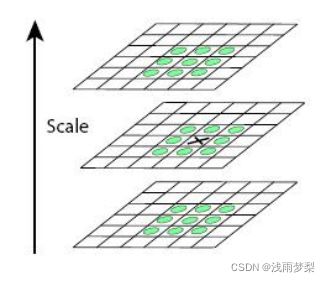
为了寻找尺度空间的极值点,每个像素点要和其图像域(同一尺度空间)和尺度域(相邻的尺度空间)的所有相邻点进行比较,当其大于(或者小于)所有相邻点时,改点就是极值点。如图所示,中间的检测点要和其所在图像的3×3邻域8个像素点,以及其相邻的上下两层的3×3领域18个像素点,共26个像素点进行比较。
从上面的描述中可以知道,每组图像的第一层和最后一层是无法进行比较取得极值的。为了满足尺度变换的连续性,在每一组图像的顶层继续使用高斯模糊生成3幅图像,高斯金字塔每组有S+3层图像,DoG金字塔的每组有S+2组图像。
找到了特征点之后,我们还要删除不好的特征点
通过比较检测得到的DoG的局部极值点实在离散的空间搜索得到的,由于离散空间是对连续空间采样得到的结果,因此在离散空间找到的极值点不一定是真正意义上的极值点,因此要设法将不满足条件的点剔除掉。可以通过尺度空间DoG函数进行曲线拟合寻找极值点,这一步的本质是去掉DoG局部曲率非常不对称的点。
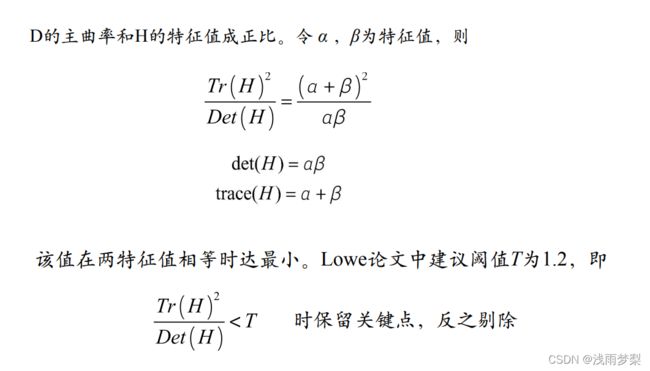
要剔除掉的不符合要求的点主要有两种:
1.低对比度的特征点
2.不稳定的边缘响应点
在删除不好的特征点之后,要进行关键点方向匹配

确定关键点的方向采用梯度直方图统计法,统计以关键点为原点,一定区域内的图像像素点对关键点方向生成所作的贡献。
为了增强匹配的鲁棒性,可以将方向分为主方向与辅方向,

关键点描述
特征描述符的生成大致有三个步骤:
1.校正旋转主方向,确保旋转不变性。
2.生成描述子,最终形成一个128维的特征向量
3.归一化处理,将特征向量长度进行归一化处理,进一步去除光照的影响。
为了保证特征矢量的旋转不变性,要以特征点为中心,在附近邻域内将坐标轴旋转θ(特征点的主方向)角度,即将坐标轴旋转为特征点的主方向。旋转后邻域内像素的新坐标为:

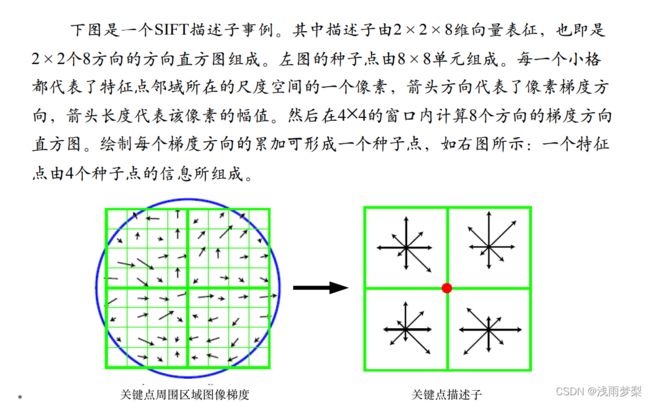
对每个关键点使用4×4共16个种子点来描述,这样一个关键点就可以产生128维的SIFT特征向量。
2.2 代码实现
import numpy as np
import cv2
from matplotlib import pyplot as plt
plt.rcParams['font.sans-serif'] = ['SimHei'] # 用来正常显示中文标签
plt.rcParams['axes.unicode_minus'] = False # 用来正常显示负号
img1 = cv2.imread(
"E:/CV/images/11.jpg") # 导入灰度图像
img2 = cv2.imread(
"E:/CV/images/12.jpg")
img1=cv2.cvtColor(img1,cv2.COLOR_BGRA2RGB)
img2=cv2.cvtColor(img2,cv2.COLOR_BGRA2RGB)
detector = cv2.ORB_create() # Oriented FAST and Rotated BRIEF
# detector = cv2.AKAZE_create()
kp1 = detector.detect(img1, None)
kp2 = detector.detect(img2, None)
kp1, des1 = detector.compute(img1, kp1) # keypoint 是关键点的列表,desc 检测到的特征的局部图的列表
kp2, des2 = detector.compute(img2, kp2)
# 获得一个暴力匹配器的对象
bf = cv2.BFMatcher(cv2.NORM_HAMMING, crossCheck=True)
# 利用匹配器 匹配两个描述符的相近程度
"""knn法"""
matches = bf.knnMatch(des1, des2, k=1) # knn 匹配可以返回k个最佳的匹配项、bf返回所有的匹配项
img32 = cv2.drawMatchesKnn(img1, kp1, img2, kp2, matches[: 50], img2, flags=2)
plt.figure(figsize=(10,10))
plt.title('knn法',fontsize=12,color='r')
plt.imshow(img32)
plt.axis('off')
plt.show()
cv2.waitKey(0)
cv2.destroyAllWindows()
运行结果如下:
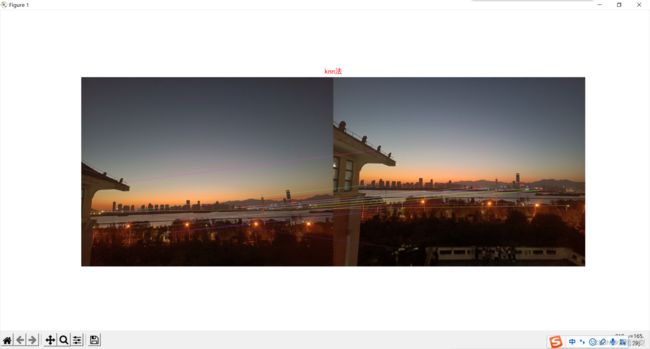
细看还是有一定错误的