KinectV2.0 VS2019配置记录
目录
- OpenCV
- VS2019配置(更兼容的配置见下文)
- Kinect中基本的操作
- 兼容性较好的配置方法
- 基于pthread多线程实现与树莓派联动
-
- 上位机
-
- 上位机环境要求(配置inc、lib、dll等环境):
- 上位机代码:
- 下位机
-
- 下位机配置:
- 下位机代码:
记录调试VS2019上的KINECT过程
参考资料:https://blog.csdn.net/baolinq/article/details/52373574
OpenCV
下载Opencv到本地,运行exe文件进行解压。
VS2019配置(更兼容的配置见下文)
- 项目->属性->配置管理器->平台设置为x64
- VC++目录->包含目录->添加
C:\Program Files\Microsoft SDKs\Kinect\v2.0_1409\inc
E:\Download\IDM\opencv\build\include
E:\Download\IDM\opencv\build\include\opencv2 - VC++目录->库目录->添加
C:\Program Files\Microsoft SDKs\Kinect\v2.0_1409\Lib\x64 ##此处注意是X64
E:\Download\IDM\opencv\build\x64\vc15\lib - 链接器->输入->附加依赖项
输入kinect20.lib;opencv_world450d.lib
此项相当于在代码中宏定义#pragma comment(lib,“xxx.lib”)
- 将opencv安装目录下(E:\Download\IDM\opencv\build\x64\vc15\bin)的opencv_videoio_ffmpeg450_64.dll、opencv_world450.dll、opencv_world450d.dll文件复制到C:\Windows\System32下
后来了解到,dll是动态链接库,其实在这之前都不太了解编译、执行的过程和原理,这里也可以把这个bin文件夹加入环境变量或者把相应的dll文件放在debug目录下(可执行文件同样的目录),动态编译过程大概是.h文件申明函数,然后到.lib文件中寻找函数接口(编译到此结束,执行的时候才有后面的股过程),.lib文件提供函数地址在执行时去寻找.dll动态链接库(存放着函数的定义和实现),调用时,寻找dll文件顺序猜测是:System32、PATH、exe同目录,没有相应dll就会报错。
这里给出这一部分的学习参考链接:https://www.cnblogs.com/azbane/p/7364060.html
https://www.cnblogs.com/405845829qq/p/4108450.html
也可以参考我整理的这部分的总结:https://blog.csdn.net/qq_15036691/article/details/110189014
备注:(解惑)
1.SysWow64 (System Windows On Windows 64)文件夹:SysWow64文件夹,是64位Windows,用来存放32位Windows系统文件的地方;
2.System32文件夹:
在64位系统中:用来存放64位程序文件的地方。
在32位系统中:用来存放32位程序文件的地方。当32位程序加载System32文件夹中的dll时,操作系统会自动映射到SysWow64文件夹中的对应的文件。
Kinect中基本的操作
调试了很久,也读了很多网上的代码,以及Kinect的Sample源代码,基本的一些操作总结如下:
Kinect中基本的逻辑,不严谨地描述就是,传感器mySensor来获取myColorSource、myBodySource等资源,然后资源用读取器OpenReader来读取到myColorReader、myBodyReader。
然后建立myBodyFrame一帧数据,采集此时此刻读取器读到的图像,然后存入myBodyArr数组进行后处理。
- 定义传感器并开启:
IKinectSensor* mySensor = nullptr;
GetDefaultKinectSensor(&mySensor);
mySensor->Open();
- 获取彩色图像:
IColorFrameSource* myColorSource = nullptr;
mySensor->get_ColorFrameSource(&myColorSource);
IColorFrameReader* myColorReader = nullptr;
myColorSource->OpenReader(&myColorReader);
int colorHeight = 0, colorWidth = 0;
IFrameDescription* myDescription = nullptr;
myColorSource->get_FrameDescription(&myDescription);
myDescription->get_Height(&colorHeight);
myDescription->get_Width(&colorWidth);
IColorFrame* myColorFrame = nullptr;
Mat original(colorHeight, colorWidth, CV_8UC4); //定义矩阵
- 获取骨骼;读取身体个数
myBodyCount:
IBodyFrameSource* myBodySource = nullptr;
mySensor->get_BodyFrameSource(&myBodySource);
IBodyFrameReader* myBodyReader = nullptr;
myBodySource->OpenReader(&myBodyReader);
int myBodyCount = 0; //身体个数
myBodySource->get_BodyCount(&myBodyCount);
- 创建mapper:
ICoordinateMapper* myMapper = nullptr;
mySensor->get_CoordinateMapper(&myMapper);
- 获取最新的帧,即读取图像:
IBodyFrame* myBodyFrame = nullptr;
myBodyReader->AcquireLatestFrame(&myBodyFrame) //要判断是否返回值为S_OK
/*如右侧代码*/while (myBodyReader->AcquireLatestFrame(&myBodyFrame) != S_OK);
- 定义存身体数据的数组
myBodyArr:
IBody** myBodyArr = new IBody * [myBodyCount];
for (int i = 0; i < myBodyCount; i++)
myBodyArr[i] = nullptr;
- 由
myBodyFrame获取身体骨骼数据存入数组myBodyArr
myBodyFrame->GetAndRefreshBodyData(myBodyCount, myBodyArr) == S_OK
myBodyArr数组输入到关节数组myJointArr
Joint myJointArr[JointType_Count];
myBodyArr[i]->GetJoints(JointType_Count, myJointArr) == S_OK
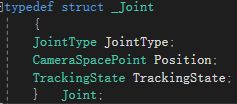
- 关节数组
myJointArr的数据结构:
以下的枚举类型告诉了我们,方括号内填相应的枚举类型可以得到相应人体关节的关节结构体,然后调用结构体成员(如Position,即可获得位置)
myJointArr[JointType_HandRight].Position;//Example,调用右手掌心的位置坐标

- 坐标空间转换:要把关节点用的摄像机坐标下的点转换成彩色空间的点
ColorSpacePoint t_point;
myMapper->MapCameraPointToColorSpace(myJointArr[JointType_HandRight].Position, &t_point);
t_point.X;
t_point.Y;
兼容性较好的配置方法
-
在工程文件夹下建立
inc、lib文件夹。

-
将
opencv安装目录\build\include下的opencv2文件夹整个复制到.\inc文件夹下;
将C:\Program Files\Microsoft SDKs\Kinect\v2.0_1409\inc下的所有文件复制到.\inc文件夹下;
将pthreads安装目录\Pre-built.2\include下的所有文件复制到.\inc文件夹下;

-
将
opencv安装目录\build\x64\vc15\lib下的所有文件复制到.\lib文件夹下;
将C:\Program Files\Microsoft SDKs\Kinect\v2.0_1409\Lib\x64下的所有文件复制到.\lib文件夹下;
将pthreads安装目录\Pre-built.2\lib下的所有文件复制到.\lib文件夹下;
-
右击属性管理器中的Debug|64,选择第一个“添加新的项目属性表”,保存在
.\test(即源代码文件夹下)
(这一步是方便以后调用这个属性配置表,不做也可以)
然后双击这个添加了的属性配置表,在属性配置中,
VC++目录 -> 包含目录:添加.\inc和.\inc\opencv2
VC++目录 -> 库目录:添加.\lib
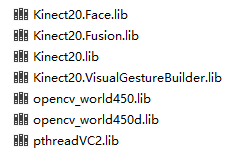
链接器 -> 输入 -> 附加依赖项:添加:kinect20.lib
opencv_world450d.lib
opencv_world450.lib
pthreadVC2.lib
ws2_32.lib
或在代码中写入以下宏定义#pragma comment(lib,“kinect20.lib”)
#pragma comment(lib,“opencv_world450d.lib”)
#pragma comment(lib,“opencv_world450.lib”)
#pragma comment(lib,“pthreadVC2.lib”)
#pragma comment(lib,“ws2_32.lib”)
以上2、3、4两步,其实是为了在其他机器上方便编译用的
- 下一步就是去把与.lib导入库文件同名的动态链接库.dll文件加入
.\x64\Debug中,,这一步是为了方便在其它计算机上运行可执行文件时,不会报错缺少.dll文件。
假设在一台装有VS的电脑上运行(如果没有VS那还要打包VS依赖的动态链接库,或者用静态编译?(没有试过)),那么需要打包的目前有kinect、opencv、以及pthread相关的dll,于是我在相关的安装目录下打包了如下的dll文件:
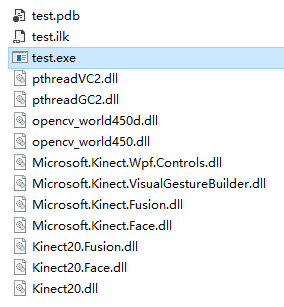
- 这样的话接下来应该就可以把这个文件夹整个拷贝给一台配置有VS环境的电脑,然后就可以直接运行这个exe文件了应该。
基于pthread多线程实现与树莓派联动
上位机
上位机环境要求(配置inc、lib、dll等环境):
(x64)
opencv
pthread(初次运行可能会报错,解决方法:在pthread.h头文件中如下操作)
#if !defined( PTHREAD_H )
#define PTHREAD_H
下面加上
#define HAVE_STRUCT_TIMESPEC
kinect2.0 SDKs for windows
上位机代码:
#include 下位机
下位机配置:
小R科技树莓派小车
使用socket进行通信
运行时先启动下位机(server端)的脚本
下位机代码:
# encoding: utf-8
import chardet
from motol_motion import *
import socket
import time
import os
print("Sever Started.")
#套接字接口
mySocket = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
#设置IP和端口
host = '192.168.1.1'
port = 2222
#bind绑定该端口
mySocket.setsockopt(socket.SOL_SOCKET,socket.SO_REUSEADDR,1)
mySocket.bind((host, port))
mySocket.listen(10)
motion_initial()
angle=[0,130,175,90,100,0,0,90,0] ## init
XRservo.XiaoRGEEK_ReSetServo() ##reset angle
os.system("cd ~/work/mjpg-streamer-experimental-xr")
try:
os.system("./mjpg_streamer -i \"./input_raspicam.so\" -o \"./output_http.so -w ./www\"")
except:
print("video was opened or failed")
while True:
#接收客户端连接
print("Wait For Connect....")
client, address = mySocket.accept()
print("Connected.")
print("IP is %s" % address[0])
print("port is %d\n" % address[1])
while True:
#读取消息
msg = client.recv(1024)
stop()
print(msg.decode('EUC-JP'))
#把接收到的数据进行解码
##print(msg.encode("utf-8"))
msg1=msg[0:2]
##print(chardet.detect(msg))
try: ##xx
msg2=int(msg[2:6]) ##xxxx
except:
msg2=0
#print("message received")
if msg == "hello":
print("im server")
elif msg== "1234":
print("re1234")
elif msg1 == b"00": ##00:stop
right_motol(0)
left_motol(0)
elif msg1 == b"01": ##01:left
left_motol(-1)
right_motol(1)
time.sleep(0.02)
elif msg1 == b"02": ##02:right
right_motol(-1)
left_motol(1)
time.sleep(0.02)
elif msg1 == b"03": ##03:go
right_motol(1)
left_motol(1)
time.sleep(0.02)
angle[7]=180
angle[8]=25
set_angle(0x07,angle[7])
set_angle(0x08,angle[8])
elif msg1 == b"04": ##04:back
right_motol(-1)
left_motol(-1)
time.sleep(0.02)
angle[7]=0
angle[8]=25
set_angle(0x07,angle[7])
set_angle(0x08,angle[8])
elif msg1 == b"10":
reset_angle()
elif msg1 == b"11": ##up(inc) 1&2 1:up(130) low(45) 2: up(175) low(135)
if (angle[2]==175):## move 1
if (angle[1]+msg2<130):
angle[1]=angle[1]+msg2
else:
angle[1]=130
angle[8]=10+40*(angle[1]-45)/85
else:
if (angle[2]+msg2<175):
angle[2]=angle[2]+msg2
else:
angle[2]=175
angle[8]=(angle[2]-135)/4
angle[7]=180
set_angle(0x08,angle[8])
set_angle(0x07,angle[7])
set_angle(0x01,angle[1])
set_angle(0x02,angle[2])
elif msg1 == b"21": ##down(dec) 1&2
if (angle[1]==45):## move 2
if (angle[2]-msg2>135):
angle[2]=angle[2]-msg2
else:
angle[2]=135
angle[8]=(angle[2]-135)/4
else:
if (angle[1]-msg2>45):
angle[1]=angle[1]-msg2
else:
angle[1]=45
angle[8]=10+40*(angle[1]-45)/85
angle[7]=180
set_angle(0x08,angle[8])
set_angle(0x07,angle[7])
set_angle(0x01,angle[1])
set_angle(0x02,angle[2])
elif msg1 == b"13": ##left(dec) 3
if (90-msg2)>=0:
angle[3]=90-msg2
else:
angle[3]=0
set_angle(0x03,angle[3])
elif msg1 == b"23": ##right(inc) 3
if (90+msg2)<=180:
angle[3]=90+msg2
else:
angle[3]=180
set_angle(0x03,angle[3])
elif msg1 == b"14": ##he(inc 150) 4 100~150
angle[4] = 150
set_angle(0x04,angle[4])
elif msg1 == b"24": ##zhang(dec 100) 4
angle[4] = 100
set_angle(0x04,angle[4])
elif msg == b"qq":
client.close()
mySocket.close()
print("end\n")
exit()
# motol_motion.py
import RPi.GPIO as GPIO
from smbus import SMBus
XRservo=SMBus(1)
def set_angle(index,angle):
XRservo.XiaoRGEEK_SetServo(index,angle)
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
ENA=13
ENB=20
IN1=19
IN2=16
IN3=21
IN4=26
def motion_initial():
GPIO.setup(ENA,GPIO.OUT,initial=GPIO.LOW)
GPIO.setup(ENB,GPIO.OUT,initial=GPIO.LOW)
GPIO.setup(IN1,GPIO.OUT,initial=GPIO.LOW)
GPIO.setup(IN2,GPIO.OUT,initial=GPIO.LOW)
GPIO.setup(IN3,GPIO.OUT,initial=GPIO.LOW)
GPIO.setup(IN4,GPIO.OUT,initial=GPIO.LOW)
motion_initial()
def gogo():
##print("all go")
GPIO.output(ENA,True)
GPIO.output(IN1,True)
GPIO.output(IN2,False)
GPIO.output(ENB,True)
GPIO.output(IN3,True)
GPIO.output(IN4,False)
def back():
##print("all back")
GPIO.output(ENA,True)
GPIO.output(IN1,False)
GPIO.output(IN2,True)
GPIO.output(ENB,True)
GPIO.output(IN3,False)
GPIO.output(IN4,True)
def stop():
##print("all stop")
GPIO.output(ENA,False)
GPIO.output(IN1,False)
GPIO.output(IN2,False)
GPIO.output(ENB,False)
GPIO.output(IN3,False)
GPIO.output(IN4,False)
def left_motol(x): ##0:stop 1:forward -1:back
GPIO.output(ENA,x)
if x==0:
GPIO.output(IN1,0)
GPIO.output(IN2,0)
##print("left stop")
elif x==1:
GPIO.output(IN1,1)
GPIO.output(IN2,0)
##print("left go")
else:
GPIO.output(IN1,0)
GPIO.output(IN2,1)
##print("left back")
def right_motol(x): ##0:stop 1:forward -1:back
GPIO.output(ENB,x)
if x==0:
GPIO.output(IN3,0)
GPIO.output(IN4,0)
##print("right stop")
elif x==1:
GPIO.output(IN3,1)
GPIO.output(IN4,0)
##print("right go")
else:
GPIO.output(IN3,0)
GPIO.output(IN4,1)
##print("right back")
(未完……)