pytorch自带网络_群友原创:万字长文入门 Pytorch 深度学习框架
“Python猫” ,一个值得加星标的公众号
花下猫语: 今天分享的文章来自于一位资深群友,是一篇很好的 Pytorch 入门路线介绍。我们公众号没有分享过这个领域的文章,之所以会分享它,主要是因为作者 silwer,他是最早加群的一批群友之一,当时我要求申请者用一两句话说明加群理由,他认真地写了 300 字,我印象深刻!他还写了不少原创文章,推荐大家关注:机器学习与推荐系统
剧照 | 《怦然心动》
作为目前越来越受欢迎的深度学习框架,pytorch 基本上成了新人进入深度学习领域最常用的框架。相比于 TensorFlow,pytorch 更易学,更快上手,也可以更容易的实现自己想要的 demo。今天的文章就从 pytorch 的基础开始,帮助大家实现成功入门。
首先,本篇文章需要大家对深度学习的理论知识有一定的了解,知道基本的 CNN,RNN 等概念,知道前向传播和反向传播等流程,毕竟本文重点是一篇实操性的教程。
其次,这篇文章我更想从一个总体性的视角展开,大家在学习的过程中更注重的应该是在接触新知识时,如何设计学习路线的一种思路分享。这种思路不一定适合所有人,但是肯定可以对你有所借鉴,你也可以基于此总结出来更适合自己的方法。
接下来我们从以下几个步骤去帮助大家入门 pytorch 的实战教程。
1. 开始一个简单的分类器 2. 在 MNIST 上实现一个 cnn 3. 常用网络层介绍 4. tensorboard 可视化 5. 以 vgg 为例实现深层网络的一些小技巧 6. GPU 加速和保存加载模型 7. RNN 和 LSTM 实现分类和回归 番外: 一个并行生成数据的例子告诉你,pytorch 未来的路该怎么做这八个步骤,对应了我的八篇学习笔记的文章,本文是从一个串讲的思路来介绍学习路径,对应步骤的更多细节会在具体的文章中展示。在每个步骤介绍的最后和全文的结尾,我们也会给出文章的链接,大家可以针对性食用~
1. 开始一个简单的分类器
我个人在学习一门新语言,一个新框架,一个新技术时,最优先要保证的就是成就感反馈。以学习 pytorch 为例,很多教程从张量开始。我自己也按照这种教程学习过,的确内容非常全尽,但是有两个原因,我自己不太推荐以这种方式入门:1)前期学习过于枯燥,没有成就感;2)有的知识内容属于深度学习的基本功,过于赘述。
所以我觉得入门一个新知识的知识,最好是先搭起来结构,然后再去慢慢补充细节。因此我在这篇文章的第一部分,先选择构建一个简单的分类器,让大家知道一个 pytorch 下的代码流程应该是什么样子。
学过 c 语言的朋友肯定知道,我们先学第一个代码的时候,肯定是先来一个 hello world,而不是去研究第一行的 #include。
对于第一个 pytorch 程序而言,我们要做的是首先跑通整个流程,如果是一个简单的分类器,数据集也就不能太复杂。因此,我们从三方面考虑:1)自定义生成一些点,分为两类;2)学习如何构建一个浅层的神经网络;3)尝试 pytorch 中的训练和测试过程。
1.1 自定义生成数据集
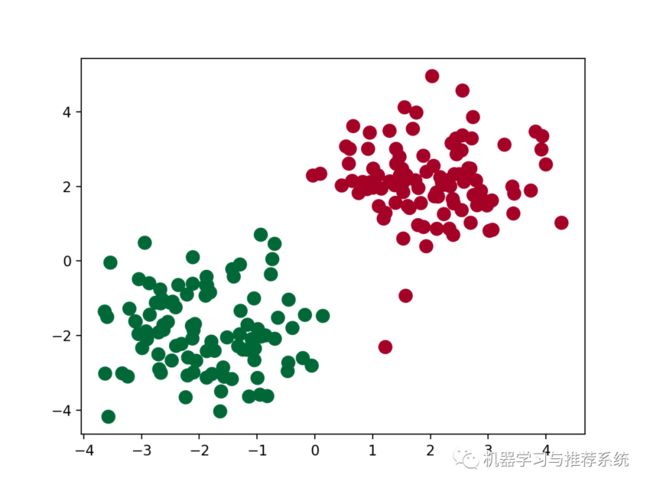
首先,自定义生成我们的数据集。利用 torch 自带的 zeros,ones 这些方法,我们生成一些随机的点,分为两类。比如分别以(2,2)和(-2,-2)为均值,随机生成一些随机数,作为两类,这样子我们就得到了我们想要的数据集。
1.2 学会构建网络的流程
其次,就是构建一个浅层的神经网络,这里我们给出一个代码示例,大家了解一下最基础的 pytorch 的网络应该如何构建:
class Net(torch.nn.Module): def __init__(self, n_feature, n_hidden, n_output): super(Net, self).__init__() self.n_hidden = torch.nn.Linear(n_feature, n_hidden) self.out = torch.nn.Linear(n_hidden, n_output) def forward(self, x_layer): x_layer = torch.relu(self.n_hidden(x_layer)) x_layer = self.out(x_layer) x_layer = torch.nn.functional.softmax(x_layer) return x_layernet = Net(n_feature=2, n_hidden=10, n_output=2)# print(net)optimizer = torch.optim.SGD(net.parameters(), lr=0.02)loss_func = torch.nn.CrossEntropyLoss()这个 Net 类,就是我们构建的代码框架,用它生成的对象就是一个我们可以用来训练和测试的网络。这个类中,初始化函数中表示了每个网络层的结构设置,而 forward() 方法表示了每个层之间的交互顺序和关系。
而 optimizer 就是优化器,包含了需要优化的参数有哪些,loss_func 就是我们设置的损失函数。
这个就像我们写一个 hello,world 一样,我们只需要知道自己该如何构造一个网络。当我们需要调整的时候,就将其中对应的模块替换掉。
1.3 训练与测试
接下来就是训练与测试的阶段。训练我们需要知道三句代码是核心:
optimizer.zero_grad() loss.backward() optimizer.step()这里的核心思路是,梯度清空,反向传播,参数更新。分别对应了这三句代码的作用。在pytorch 中,梯度会保留,所以需要用 zero_grad() 来清空,然后利用损失函数反向传播计算梯度,最后就是用我们定义的优化器将每个需要优化的参数进行更新。
测试阶段就很简单了,直接将输入丢进去就可以看到预测结果。现在我们重新随机生成一些数据点作为测试集,可以看到训练集对它的分类结果就很明显。

至此,我们就完成了一个对于简单分类器的描述。当然,如果你对前面的文章没有任何了解,可能会觉得这部分不够入门。那么可以看一下我的第一篇笔记:pytorch学习笔记(1):开始一个简单的分类器,这里详细的介绍了如何实现一个简单分类器的细节介绍。
2. 在 MNIST 上实现一个 cnn
完成了一个线性分类器后,我们的学习路线应该是什么样子呢?我觉得比较合适的做法是先改动 “hello,world” 的部分,让我们看看把最直观的部分进行修改,会有哪些变化。并且可以得到很直接的成就反馈。
做深度学习,肯定最熟悉的就是 CNN 做图片分类。在一张图片上,通过卷积来一层层的提取特征,最终实现分类的效果。那么我们既然已经知道如何实现一个分类器,接下来就来看看如何用 CNN 完成图片的分类。
这里的数据集我们选择 mnist,是大家经常用来作为入门的图片分类数据集,内容是各种手写数字的展示。在安装 torch 的时候,大家参考的教程一般也会推荐安装 torchvision。在这个之中给出了一个 dataset 的集合,其中包括了各种各样的常见数据集,mnist 自然也是其中之一。
对于这些数据集的使用方法,主要是 root,transform 等几个参数,并不是很难。然后对应的有一个 torch.data 中的 DataLoader 方法,可以用来让数据按自己想要的 batch 生成。具体的如何并行式生成数据,在本文的最后一部分会进行介绍。这里我们只需要知道可以使用 DataLoader 并行式按批生成数据。
核心的是如何构建一个 CNN 网络。我们前面学会了分类器,只使用了一个隐藏层进行 embedding 操作就可以了。那么如果要实现 CNN,我们自然要加入卷积层,激活层,池化层这些操作。
class CNN(nn.Module): def __init__(self): super(CNN, self).__init__() self.conv1 = nn.Sequential( nn.Conv2d( in_channels=1, out_channels=16, kernel_size=5, stride=2, padding=2, ), nn.ReLU(), nn.MaxPool2d(2) ) self.conv2 = nn.Sequential( nn.Conv2d(16, 32, 5, 1, 2), nn.ReLU() ) self.out = nn.Linear(32 * 7 * 7, 10) def forward(self, x): x = self.conv1(x) x = self.conv2(x) x = x.view(x.size(0), -1) output = self.out(x) return output所以按照这个样子,我们就可以改造前面简单分类器的结构,生成我们现在的 CNN 结构。从代码中可以看到,将第一个卷积层设计为:卷积+激活+最大池化;第二个卷积层设计为:卷积+激活。最后跟上一个全连接层,实现整个 CNN 的网络结构设计。
最终的网络运行结果可以对 mnist 数据集达到 97% 以上的分类精度,可见 CNN 在图片分类领域的确有独到的优势。
现在我们通过适当的改造实现了一个 CNN 在图片分类上的应用,具体的更多细节可以参考:pytorch学习笔记(2):在 MNIST 上实现一个 cnn
那么在完成了这一步的操作后,我们可能需要思考一点:如果我自己想去做一些更自定义的网络结构出来,该如何实现呢?我又怎么知道去修改哪里,以及修改成什么样子呢?所以接下来需要了解的是 torch 都提供了哪些集成好的常用网络层。
3. 常用网络层介绍
通过两个递进的例子,我们已经知道了该如何实现一个基本的 CNN 网络结构。但是如前面提到的问题一样,如果想改某一部分,应该怎么改呢?
所以从学习的角度出发的话,现在应该考虑的是介绍常用的网络层都有哪些。然后我们就可以(成为一个调包侠。哈哈,入门肯定要从调包开始嘛~)开始针对自己想要设计的网络结构选择合适的模块啦~
在这部分我们从以下几个方面去对 pytorch 提供的网络层进行了介绍:
卷积层:自带了一维,二维,三维等卷积函数; 池化层:可选的有最大池化,平均池化等; Dropout:有一维,二维等选择; BN层:是否加入 BN 层的操作; 激活函数:elu,relu,sigmoid,tanh,softmax 等层可供选择; 损失函数:mse,CrossEntropy 等可供选择。
总体来说这部分内容,我简单的给一个大纲,就不过多赘述了,具体的每部分的细节参数设置,以及一些帮助大家理解的实例都可以在这篇文章中进一步查看:pytorch学习笔记(3):常用网络层介绍。
4. tensorboard 可视化
现在我们具备了初步构建自定义网络结构的能力,也可以完成在自带数据集上进行训练和测试的操作。那么如何让我们对训练过程中的性能有一个更直观的认识呢?对网络结构如何进行可视化呢?数据集的内容是什么样子的?
这些功能我们都可以用一个名为 tensorboard 的工具来实现,这个工具在 TensorFlow 中也很常用。
如何学习使用 tensorboard 呢?这部分我们建议从如下几个步骤去进行:首先举一个简单的例子,让代码示例跑起来;然后将整个训练过程可视化出来;最后再展示如何可视化数据集的内容以及网络结构流程。
4.1 run一个例子
这里我们选择先运行一个官方教程给出的例子,了解如何使用 tensorboard 的基本流程:
from torch.utils.tensorboard import SummaryWriterwriter = SummaryWriter()x = range(100)for i in x: writer.add_scalar('y=2x', i * 2, i)writer.close()从这个流程中我们可以看到,引入了一个 SummaryWriter 类,然后生成一个 writer 对象,在 for 循环中,每次调用 add_scalar() 方法,往进添加内容。
在完成这个代码后,如果我们在终端中输入:
tensorboard --logdir='runs'我们会得到一副 y=2x 的斜线,这就相当于揭示了 tensorboard 的本质。每次将一个值传入 ‘runs’ 文件夹中的文件中,然后在终端中去调用保存的数据,产生我们想要的图形。
这一步我们主要是理解上面的这个流程,那么我们就来看看该怎么替换想要换掉的模块,来生成我们想要生成的图形。
4.2 可视化 CNN 的训练数据
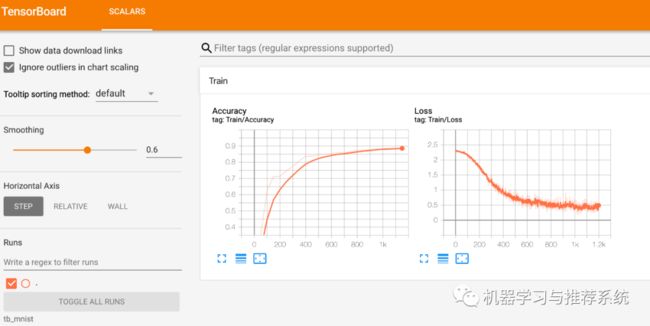
前面第二部分,我们定义了一个 CNN 来实现对图片的分类效果。那么在训练过程中的 accuracy 和 loss 是如何变化的呢?
output = cnn(b_x)loss = loss_func(output, b_y)optimizer.zero_grad()loss.backward()optimizer.step()if step % 50 == 0: test_output = cnn(test_x) pred_y = torch.max(test_output, 1)[1].data accuracy = float((pred_y == test_y.data.numpy()).astype(int).sum()) / float(test_y.size(0)) writer.add_scalar("Train/Accuracy", accuracy, step)writer.add_scalar("Train/Loss", loss.item(), step)这里我们可以看出来是训练部分的内容,只是在后面加上了我们前面的一个步骤:添加了两行 add_scalar() 方法。其实就是训练时每隔 50 步都进行一次测试,并将测试结果记录下来,并且每一步的 loss 也都会保存下来。
所以到最后,我们在终端中输入上面提到的:tensorboard —logdir=dir,就可以看到下面这幅图:
4.3 图片和模型的可视化
除了上面对数值的记录,tensorboard 还提供了诸如图片和模型等的可视化,相比于使用 add_scalar(),这里我们使用 add_image() 和 add_graph() 来实现对应的功能。
add_image() 对图片数据进行保存,每次输入一个 batch 的数据,也就是说 batch 有多大,其实相当于可视化了多少的 image。
add_graph() 则是对模型结构的保存,在可视化的时候,就可以对这些内容进行自动展示。
这里我们主要是介绍概括性的方法与学习流程,具体的关于 tensorboard 的内容,每个方法的参数设置,包括数据保存的路径等内容,大家可以进一步参考:pytorch学习笔记(4):tensorboard 可视化。
5. vgg 及一些 tricks
这一部分的内容就比较简单了,找一个比较经典的深层网络来实现一下,验证一下我们之前的基础。此外,再介绍一种方法来简化深层网络的构造方法。
首先实现一个 vgg 本身并没有太多难度,我们看一看 paper,就可以知道网络的结构设置。我们不拘泥于 vgg,而是说一个深层次的网络的构成。
实现一个长的网络,本质上还是按照前面的思路,一层层的把网络堆叠起来。我们先看使用 Sequential 构建一个卷积层的样子:

这是一层的网络样子,我们根据自己要实现的网络定义,比如参考 vgg 的 paper 内容,定义了卷积层的各个参数,加上 BN 层,加上 relu 进行激活。
整体就是我们定义好的一层,其它层以此类推,用我们前面介绍的常用网络层就可以像搭积木一样,把它们搭建起来。
所以按照前面的教程思路,一个深层的神经网络,例如 vgg,本质上是可以通过简单的堆叠来实现的。最后我们在 forward 函数中,定义好如下内容:
def forward(self, x): x = self.conv1(x) x = self.conv2(x) x = self.conv3(x) x = self.conv4(x) x = self.conv5(x) x = self.conv6(x) x = self.conv7(x) x = self.conv8(x) x = self.conv9(x) x = self.conv10(x) x = self.conv11(x) x = self.conv12(x) x = self.conv13(x) x = x.view(x.size(0), -1) output = self.out(x) return output可以看到从内容上就是前面的 CNN 的扩展,没有技术上的新东西。但是也显然易见,有点丑陋,写这么长个 forward,而且还看起来都是重复的东西,程序员当然不能容忍重复的内容一直出现。
所以这里分为两步我们去考虑如何简化一个模型:sequential 以 list 的形式输入各层的网络结构;更加方便的生成各层网络结构的 list。具体的意思是什么呢?我们简单的展开来讲一下。
对一个网络的设置而言,我们使用 Sequential 来定义我们想要的一层网络。这里的一层往往指代卷积+激活+池化等,当然不固定是这样子。换句话说,一个 Sequential 里面本身就定义了不止一个网络,那么我们是否可以将所有网络都放到一个 Sequential 里面来?答案是可以的!
对于一个 Sequential,我们可以将所有的网络结构都输入进去,以动态参数的方式。也就是说,我们让 Sequential 的输入是这个形式:*[网络层1,网络层2,…,网络层n]。可以看到,是一个 list 前面加 *,就可以将 list 中的所有元素以参数的方式传进去。
但是这样输入进来的参数,需要一个非常非常长的 list。在定义这个 list 的时候,显得我们的模型更加难看。所以我们需要一个优雅的方式,来生成这样一个 list,其中的每个元素都是我们想要的网络层结构。所以我们介绍的生成方式就是下述代码:
def make_layers(cfg, batch_norm=False): layers = [] in_channels = 3 for v in cfg: if v == 'M': layers += [nn.MaxPool2d(kernel_size=2, stride=2)] else: conv2d = nn.Conv2d(in_channels, v, kernel_size=3, padding=1) if batch_norm: layers += [conv2d, nn.BatchNorm2d(v), nn.ReLU(inplace=True)] else: layers += [conv2d, nn.ReLU(inplace=True)] in_channels = v return nn.Sequential(*layers)cfg = [64, 64, 'M', 128, 128, 'M', 256, 256, 256, 'M', 512, 512, 512, 'M', 512, 512, 512, 'M']这里就可以很直接的看到,最终生成的 layers 这个 list,就是我们想要的内容,其中包含了我们需要的每个网络层结构。在 for 循环中就是我们生成的方式,按照在参数 cfg 中定义的内容,依次往 layers 中添加我们需要的内容。数字表示该卷积层的输出通道,字母 ‘M' 表示最大池化。
可以看到,以这种方式,我们就可以通过只调整 cfg 这个 list,最终实现目标的深层次的神经网络的设计。更详细的介绍和设计,可以参考我们之前的学习笔记:pytorch学习笔记(5):vgg 实现以及一些 tricks。
6. GPU 和如何保存加载模型
到了这一步,我们的网络深度也加上来了,是时候考虑一下 GPU 加速的问题了。GPU 在深度学习中是无论如何也绕不过去的一个话题,好在 pytorch 在 GPU 的使用方面给了非常友好的接口,下面我们就看一下如何使用 GPU 加速,以及如何保存训练好的模型,到测试时再加载出来。
6.1 先看看 GPU 咋用吧
我们就来说一下 GPU 在 pytorch 中有多么简单易用吧。首先如下简单命令:
torch.cuda.is_available()这条命令可以判读你是否安装好了 GPU 版本的 pytorch,或者你的显卡是否可以使用,如果结果显示 True,那我们就可以进行下一步了。
GPU 的使用在 pytorch 中,我们就记住三部分:迁移数据,迁移模型,迁回数据。
首先迁移数据是指,我们需要将数据迁移到 GPU 上,这个时候就体现出显存的重要性,显存越大,就可以往进迁移的数据越多;
其次是迁移模型,也就是说将我们定义好的网络模型也迁移到 GPU 上,这个时候就可以在 GPU 上对给定模型,利用迁移进来的数据进行训练和测试;
最后是迁回数据,也就是说将测试好的结果再返回 CPU,进行下一步的其它处理,比如计算精度之类。
这里给一个小栗子来为大家看一下这三步:
# 指定好用的 GPU 设备,如果是单卡,一般就是 0.device = "cuda:0"# 迁移数据images = images.to(device)labels = labels.to(device)# 迁移网络,将我们定义好的网络 cnn 迁移到 GPU 中。cnn.to(device)# 训练...# 测试... 生成测试结果 pred_y# 迁回数据,将 pred_y 再迁回 CPU。pred_y = pred_y.cpu()通过这个例子,我们可以很清晰的看到如何使用 GPU 完成我们上所述的三个步骤。只要保证了将这三部分加入到你的代码中,中间的训练和测试依然保持原样,我们就实现了利用 GPU 加速的目的。
6.2 训练好的模型如何保存和加载呢?
关于 pytorch 中的模型保存,一般有两种途径:只保存网络参数,保存整个网络。
首先要知道的一点是,在 pytorch 中所有的网路参数数据都是一个 dict,也就是网络对象的 state_dict() 参数。那么我们如果想保存下来需要的内容,其实在底层操作方面并不复杂。
现在来看如何保存模型,其实就一条语句:torch.save(content,path),就可以将需要的 content 保存到目标的 path 中。这里唯一的需要思考的是如何区分只保存网络参数,还是保存整个网络。
只保存网络参数时,我们的 content 就是 cnn.state_dict(),如果保存整个网络,content 就是 cnn。下面两行代码分别是只保存参数和保存整个网络:
torch.save(cnn.state_dict(), PATH)torch.save(cnn, PATH)可以看到保存的方式非常方便,一个函数就可以完成。那么对应的,读取的方式是什么呢?
分别用两个不同的方法来进行读取:load_state_dict() 和 load()。
只看名称也可以想到前者是读取参数,后者是读取整个网络。但是只读取参数的话,我们需要提前定义好对应的网络对象,然后通过读取参数的方式,为网络的结构中填充相应的参数。
具体的如何使用 GPU 加速模型,如何存储和读取训练好的网络,细节的代码和例子可以看:pytorch学习笔记(6):GPU 和如何保存加载模型。
7. RNN 回归
前面我们介绍了 CNN 的创建方式,常用的网络层,基于此的基础上,又介绍了一些其它的相关操作,比如 GPU 加速等。现在我们来看系列教程的最后一部分,就是如何使用 RNN。
以 RNN 为例,我们构建一个回归器,以此来介绍 RNN 在 pytorch 中的使用方法,帮助大家入门 RNN 的操作过程。
7.1 RNN 参数
我们这里不再赘述 RNN 的定义和内容,在本节后面的文章链接中,详细的介绍了这一部分。我们在这里只说一下在 pytorch 中的 RNN 类可以设置的参数。
input_size:这个参数表示的输入数据的维度。比如输入一个句子,这里表示的就是每个单词的词向量的维度。 hidden_size :可以理解为在 CNN 中,一个卷积层的输出维度一样。这里表示将前面的 input_size 映射到一个什么维度上。 num_layers:表示循环的层数。举个栗子,将 num_layers 设置为 2,也就是将两个 RNN 堆叠在一起,第一层的输出作为第二层的输入。默认为 1。 nonlinearity:这个参数对激活函数进行选择,目前 pytorch 支持 tanh 和 relu,默认的激活函数是 tanh。 bias:这个参数表示是否需要偏置项,默认为 True。 batch_first:这个是我们数据的格式描述,在 pytorch 中我们经常以 batch 分组来训练数据。这里的 batch_size 表示 batch 是否在输入数据的第一个维度,如果在第一个维度则为 True,默认为 False,也就是第二个维度。 dropout:这里就是对每一层的输出是否加一个 dropout 层,如果参数非 0,那么就会加上这个 dropout 层。值得注意的是,对最后的输出层并不会加,也就是这个参数只有在 num_layers 参数大于 1 的时候才有意义。默认为 0。 bidirectional:如果为 True,则表示 RNN 网络为双向结构,默认为 False。
这些参数的给定,我们就可以轻松的去设置我们想要的 RNN 结构。此处 input_size 和 hidden_size 是两个必须传入的参数,需要让网络知道将什么维度的输入映射到什么维度上去。其余的参数都给了比较常用的默认值。
7.2 回归器:用 sin 预测 cos
在这里我们举一个非常容易理解的例子。也不去折腾什么复杂数据集,我们同样使用一个简单的自定义数据集:sin 函数作为 data,cos 函数作为 label。因为重点是学习 RNN 的使用,所以我们无需测试集,只看训练的拟合程度,判断是否成功收敛就可以了。
首先给出来我们定义的 RNN 结构,再对其中的细节进行解读:
class RNN(nn.Module): def __init__(self): super(RNN, self).__init__() self.rnn = nn.RNN( input_size=1, hidden_size=32, batch_first=True, ) self.out = nn.Linear(32, 1) def forward(self, x, h_state): r_out, h_state = self.rnn(x, h_state) outs = [] for time_step in range(r_out.size(1)): outs.append(self.out(r_out[:, time_step, :])) return torch.stack(outs, dim=1), h_state我们先看第一部分 RNN 的结构上,定义了三个参数:input_size,hidden_size,batch_first。
input_size 我们设置为 1,是因为每次输入的数据上,只有一个点的位置,数据是一维数据;
hidden_size 设置为 32,表示我们想要将这个数据映射到 32 维的隐空间上,这个值由自己进行选择,不要太小,也不要太大(太小会导致拟合能力较差,太大会导致计算资源消耗过多);
batch_first 设为 True,表示我们的数据格式中,第一个维度是 batch。
最终,根据前面对参数的介绍,可以得知,我们构建了一个单层的 RNN 网络,输入的每个 time_step 上的数据都是一维的,通过将其映射到 32 维的隐空间上,来发掘对标签数据的拟合关系。
接下来我们看一下 forward 函数中的内容,与 CNN 的 forward 中有些不一样。在 CNN 中,我们直接将对应的网络结构往一起拼接就可以,这里多了一些奇怪的参数。这是为什么呢?
从第一行开始看起,首先 RNN 我们都知道,每个 time_step 的循环中,都是将上一个循环的隐状态和当前的输入结合起来作为输入。那么 r_out 和 h_state 就是当前状态的输出和隐状态。
第二行的 outs 是一个空列表,用来存储什么内容呢?我们往下看。
后面是一个 for 循环,循环的次数取决于 r_out.size(1)。这个参数表示什么呢?r_out 我们知道是输出,这个输出的格式应该和输入是相同格式(batch,time_step,hidden_size),所以 r_out.size(1) 表示了这批数据的 time_step 的大小,也就是这批数据有多少个点。将对应的数据进行 self.out() 操作,也就是将 32 维的数据再映射到 1 维,并将结果 append 到 outs 中。
这里我们就知道前面定义的 outs 列表用来装什么数据了,最后将结果 stack 起来,作为 forward 的返回值。
这里看一下训练过程中的拟合情况:

蓝色线条展示了模型的拟合过程,可以看到最终逐渐拟合到了目标的 cos 曲线上(红色线条)。
本部分更多的细节,包括 RNN 原理的简单介绍,对应的网络的运行细节都在:第七篇文章 中可以看到。除此之外,这篇文章中还进一步给出了一个利用 LSTM 实现一个对 mnist 数据集进行分类的例子,帮助我们可以学习 pytorch 中 LSTM 的使用方法,非常建议看一下这篇文章:pytorch学习笔记(7):RNN 和 LSTM 实现分类和回归。
番外篇:如何进阶
番外篇不是说不重要的一步,而是更多的想表达我对学习流程为何这么设置的思路。通过前面的文章,大家肯定可以算是基本入门了 pytorch 的使用,至少不会出现想要实现一个网络时,手足无措的情况。但是如果从学好这个框架出发,这肯定是远远不够的。
那么我们应该如何去学好这个非常流行的框架呢?我们首先应该是按照前面文章的思路一样,将整体流程的思维架设起来,知道应该怎么入手,可能大神还会给你说如何底层加速,如何优化细节,如何并行式加载数据等。但是我们如果一上来就学的那么细,可能现在还云里雾里,不知道那种细节性的文章在说什么。
所以这里我们给出一个并行式加载数据的例子,让大家知道,在架设起来对 pytorch 的整体性认知以后,我们就可以很轻松的去针对性补充自己需要学会的内容。
这里给出一篇文章的例子,讲解了如何提高数据加载的速度,让我们可以利用 pytorch 自带的 DataLoader 类,自定义设置自己的数据加载类型,让你的数据生成不再成为训练的瓶颈。具体的细节可以看:一个例子告诉你,在 pytorch 中应该如何并行生成数据。
重点不是这篇文章,而是授之以渔。按照这类方法,大家就可以进一步去优化自己的知识体系,补充对细节上的提升。大家通过本篇系列文章的汇总教程以后,就可以很轻松的去学习其它对 pytorch 技能进行优化的进阶文章了。
总结
这是一篇对 pytorch 进行入门教程的文章,不仅仅是对框架的学习,这样的学习方法也可以借鉴到其它的框架,编程语言等中去。
系列教程详细列表pytorch学习笔记(1):开始一个简单的分类器
pytorch学习笔记(2):在 MNIST 上实现一个 cnn
pytorch学习笔记(3):常用网络层介绍
pytorch学习笔记(4):tensorboard 可视化
pytorch学习笔记(5):vgg 实现以及一些 tricks
pytorch学习笔记(6):GPU 和如何保存加载模型
pytorch学习笔记(7):RNN 和 LSTM 实现分类和回归
一个例子告诉你,在 pytorch 中应该如何并行生成数据
优质文章,推荐阅读:
Python 编程语言的核心是什么?
两万字长文:基于 Python 协程的并发编程实践
Python 为什么不用分号作终止符?
不使用 if-elif 语句,如何优雅地判断某个数字所属的等级?
