PyTorch深度学习:60分钟入门(Translation) PyTorch深度学习:60分钟入门(Translation)

PyTorch深度学习:60分钟入门(Translation)
首先惯例上原文链接,特别的原作者是以ipyhton notebook来写的教程,运行相当的方便。但带来的问题就是翻译作为专栏文章的效果实在是太差。
原文档链接在此:Deep Learning with PyTorch.ipynb
特别注明:原教程是以ipython notebook写就,因此代码部分非常零散,我在翻译的过程中将部分代码进行了整合以保证文章的紧凑,翻译的目的是将教程说明部分表达完整,具体的代码运行步骤请移步Github下载源文件进行代码的运行。
以下是教程的主体部分:
本教程的目的:
- 更高层级地理解PyTorch的Tensor库以及神经网络。
- 训练一个小的神经网络来对图像进行分类。
本教程以您拥有一定的numpy基础的前提下展开
Note: 务必确认您已经安装了 torch 和 torchvision 两个包。
PyTorch是什么?
这是一个基于Python的科学计算包,其旨在服务两类场合:
- 替代numpy发挥GPU潜能
- 一个提供了高度灵活性和效率的深度学习实验性平台
我们开搞
Tensors
Tensors和numpy中的ndarrays较为相似, 因此Tensor也能够使用GPU来加速运算。
from __future__ import print_function
import torch
x = torch.Tensor(5, 3) # 构造一个未初始化的5*3的矩阵
x = torch.rand(5, 3) # 构造一个随机初始化的矩阵
x # 此处在notebook中输出x的值来查看具体的x内容
x.size()
#NOTE: torch.Size 事实上是一个tuple, 所以其支持相关的操作*
y = torch.rand(5, 3)
#此处 将两个同形矩阵相加有两种语法结构
x + y # 语法一
torch.add(x, y) # 语法二
# 另外输出tensor也有两种写法
result = torch.Tensor(5, 3) # 语法一
torch.add(x, y, out=result) # 语法二
y.add_(x) # 将y与x相加
# 特别注明:任何可以改变tensor内容的操作都会在方法名后加一个下划线'_'
# 例如:x.copy_(y), x.t_(), 这俩都会改变x的值。
#另外python中的切片操作也是资次的。
x[:,1] #这一操作会输出x矩阵的第二列的所有值
阅读材料:
100+ Tensor的操作,包括换位、索引、切片、数学运算、线性算法和随机数等等。
详见:torch - PyTorch 0.1.9 documentation
Numpy桥
将Torch的Tensor和numpy的array相互转换简直就是洒洒水啦。注意Torch的Tensor和numpy的array会共享他们的存储空间,修改一个会导致另外的一个也被修改。
# 此处演示tensor和numpy数据结构的相互转换
a = torch.ones(5)
b = a.numpy()
# 此处演示当修改numpy数组之后,与之相关联的tensor也会相应的被修改
a.add_(1)
print(a)
print(b)
# 将numpy的Array转换为torch的Tensor
import numpy as np
a = np.ones(5)
b = torch.from_numpy(a)
np.add(a, 1, out=a)
print(a)
print(b)
# 另外除了CharTensor之外,所有的tensor都可以在CPU运算和GPU预算之间相互转换
# 使用CUDA函数来将Tensor移动到GPU上
# 当CUDA可用时会进行GPU的运算
if torch.cuda.is_available():
x = x.cuda()
y = y.cuda()
x + y
PyTorch中的神经网络
接下来介绍pytorch中的神经网络部分。PyTorch中所有的神经网络都来自于autograd包首先我们来简要的看一下,之后我们将训练我们第一个的神经网络。
Autograd: 自动求导
autograd 包提供Tensor所有操作的自动求导方法。
这是一个运行时定义的框架,这意味着你的反向传播是根据你代码运行的方式来定义的,因此每一轮迭代都可以各不相同。
以这些例子来讲,让我们用更简单的术语来看看这些特性。
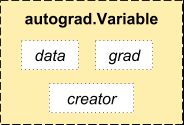
autograd.Variable 这是这个包中最核心的类。 它包装了一个Tensor,并且几乎支持所有的定义在其上的操作。一旦完成了你的运算,你可以调用 .backward()来自动计算出所有的梯度。
你可以通过属性 .data 来访问原始的tensor,而关于这一Variable的梯度则集中于 .grad 属性中。
还有一个在自动求导中非常重要的类 Function。
Variable 和 Function 二者相互联系并且构建了一个描述整个运算过程的无环图。每个Variable拥有一个 .creator 属性,其引用了一个创建Variable的 Function。(除了用户创建的Variable其 creator 部分是 None)。
如果你想要进行求导计算,你可以在Variable上调用.backward()。 如果Variable是一个标量(例如它包含一个单元素数据),你无需对backward()指定任何参数,然而如果它有更多的元素,你需要指定一个和tensor的形状想匹配的grad_output参数。
from torch.autograd import Variable
x = Variable(torch.ones(2, 2), requires_grad = True)
y = x + 2
y.creator
# y 是作为一个操作的结果创建的因此y有一个creator
z = y * y * 3
out = z.mean()
# 现在我们来使用反向传播
out.backward()
# out.backward()和操作out.backward(torch.Tensor([1.0]))是等价的
# 在此处输出 d(out)/dx
x.grad
最终得出的结果应该是一个全是4.5的矩阵。设置输出的变量为o。我们通过这一公式来计算:
,,,因此,,最后有
你可以使用自动求导来做许多疯狂的事情。
x = torch.randn(3)
x = Variable(x, requires_grad = True)
y = x * 2
while y.data.norm() < 1000:
y = y * 2
gradients = torch.FloatTensor([0.1, 1.0, 0.0001])
y.backward(gradients)
x.grad
阅读材料:
你可以在这读更多关于Variable 和 Function的文档: pytorch.org/docs/autograd.html
神经网络
使用 torch.nn 包可以进行神经网络的构建。
现在你对autograd有了初步的了解,而nn建立在autograd的基础上来进行模型的定义和微分。
nn.Module中包含着神经网络的层,同时forward(input)方法能够将output进行返回。
举个例子,来看一下这个数字图像分类的神经网络。
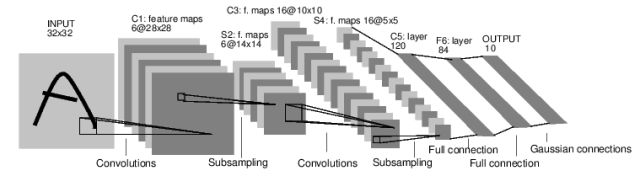
这是一个简单的前馈神经网络。 从前面获取到输入的结果,从一层传递到另一层,最后输出最后结果。
一个典型的神经网络的训练过程是这样的:
- 定义一个有着可学习的参数(或者权重)的神经网络
- 对着一个输入的数据集进行迭代:
- 用神经网络对输入进行处理
- 计算代价值 (对输出值的修正到底有多少)
- 将梯度传播回神经网络的参数中
- 更新网络中的权重
- 通常使用简单的更新规则: weight = weight + learning_rate * gradient
让我们来定义一个神经网络:
import torch.nn as nn
import torch.nn.functional as F
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(1, 6, 5) # 1 input image channel, 6 output channels, 5x5 square convolution kernel
self.conv2 = nn.Conv2d(6, 16, 5)
self.fc1 = nn.Linear(16*5*5, 120) # an affine operation: y = Wx + b
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10)
def forward(self, x):
x = F.max_pool2d(F.relu(self.conv1(x)), (2, 2)) # Max pooling over a (2, 2) window
x = F.max_pool2d(F.relu(self.conv2(x)), 2) # If the size is a square you can only specify a single number
x = x.view(-1, self.num_flat_features(x))
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x
def num_flat_features(self, x):
size = x.size()[1:] # all dimensions except the batch dimension
num_features = 1
for s in size:
num_features *= s
return num_features
net = Net()
net
'''神经网络的输出结果是这样的
Net (
(conv1): Conv2d(1, 6, kernel_size=(5, 5), stride=(1, 1))
(conv2): Conv2d(6, 16, kernel_size=(5, 5), stride=(1, 1))
(fc1): Linear (400 -> 120)
(fc2): Linear (120 -> 84)
(fc3): Linear (84 -> 10)
)
'''
仅仅需要定义一个forward函数就可以了,backward会自动地生成。
你可以在forward函数中使用所有的Tensor中的操作。
模型中可学习的参数会由net.parameters()返回。
params = list(net.parameters())
print(len(params))
print(params[0].size()) # conv1's .weight
input = Variable(torch.randn(1, 1, 32, 32))
out = net(input)
'''out 的输出结果如下
Variable containing:
-0.0158 -0.0682 -0.1239 -0.0136 -0.0645 0.0107 -0.0230 -0.0085 0.1172 -0.0393
[torch.FloatTensor of size 1x10]
'''
net.zero_grad() # 对所有的参数的梯度缓冲区进行归零
out.backward(torch.randn(1, 10)) # 使用随机的梯度进行反向传播
注意: torch.nn 只接受小批量的数据
整个torch.nn包只接受那种小批量样本的数据,而非单个样本。 例如,nn.Conv2d能够结构一个四维的TensornSamples x nChannels x Height x Width。
如果你拿的是单个样本,使用input.unsqueeze(0)来加一个假维度就可以了。
复习一下前面我们学到的:
- torch.Tensor - 一个多维数组
- autograd.Variable - 改变Tensor并且记录下来操作的历史记录。和Tensor拥有相同的API,以及backward()的一些API。同时包含着和张量相关的梯度。
- nn.Module - 神经网络模块。便捷的数据封装,能够将运算移往GPU,还包括一些输入输出的东西。
- nn.Parameter - 一种变量,当将任何值赋予Module时自动注册为一个参数。
- autograd.Function - 实现了使用自动求导方法的前馈和后馈的定义。每个Variable的操作都会生成至少一个独立的Function节点,与生成了Variable的函数相连之后记录下操作历史。
- 定义了一个神经网络。
- 处理了输入以及实现了反馈。
- 计算代价。
- 更新网络中的权重。
一个代价函数接受(输出,目标)对儿的输入,并计算估计出输出与目标之间的差距。
nn package包中一些不同的代价函数.
一个简单的代价函数:nn.MSELoss计算输入和目标之间的均方误差。
举个例子:
output = net(input)
target = Variable(torch.range(1, 10)) # a dummy target, for example
criterion = nn.MSELoss()
loss = criterion(output, target)
'''loss的值如下
Variable containing:
38.5849
[torch.FloatTensor of size 1]
'''
现在,如果你跟随loss从后往前看,使用.creator属性你可以看到这样的一个计算流程图:
input -> conv2d -> relu -> maxpool2d -> conv2d -> relu -> maxpool2d
-> view -> linear -> relu -> linear -> relu -> linear
-> MSELoss
-> loss
因此当我们调用loss.backward()时整个图通过代价来进行区分,图中所有的变量都会以.grad来累积梯度。
# For illustration, let us follow a few steps backward
print(loss.creator) # MSELoss
print(loss.creator.previous_functions[0][0]) # Linear
print(loss.creator.previous_functions[0][0].previous_functions[0][0]) # ReLU
'''
现在我们已经了解如何使用代价函数了。
阅读材料:
神经网络包中包含着诸多用于神经网络的模块和代价函数,带有文档的完整清单在这里: torch.nn - PyTorch 0.1.9 documentation
只剩下一个没学了:
- 更新网络的权重
最简单的更新的规则是随机梯度下降法(SGD):
weight = weight - learning_rate * gradient
我们可以用简单的python来表示:
learning_rate = 0.01
for f in net.parameters():
f.data.sub_(f.grad.data * learning_rate)
然而在你使用神经网络的时候你想要使用不同种类的方法诸如:SGD, Nesterov-SGD, Adam, RMSProp, etc.
我们构建了一个小的包torch.optim来实现这个功能,其中包含着所有的这些方法。 用起来也非常简单:
import torch.optim as optim
# create your optimizer
optimizer = optim.SGD(net.parameters(), lr = 0.01)
# in your training loop:
optimizer.zero_grad() # zero the gradient buffers
output = net(input)
loss = criterion(output, target)
loss.backward()
optimizer.step() # Does the update
就是这样。
但你现在也许会想。
那么数据怎么办呢?
通常来讲,当你处理图像,声音,文本,视频时需要使用python中其他独立的包来将他们转换为numpy中的数组,之后再转换为torch.*Tensor。
- 图像的话,可以用Pillow, OpenCV。
- 声音处理可以用scipy和librosa。
- 文本的处理使用原生Python或者Cython以及NLTK和SpaCy都可以。
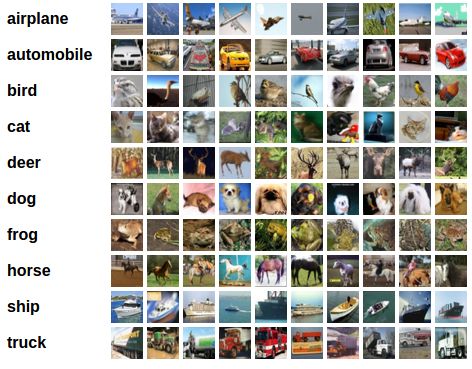
特别的对于图像,我们有torchvision这个包可用,其中包含了一些现成的数据集如:Imagenet, CIFAR10, MNIST等等。同时还有一些转换图像用的工具。 这非常的方便并且避免了写样板代码。
本教程使用CIFAR10数据集。 我们要进行的分类的类别有:'airplane', 'automobile', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck'。 这个数据集中的图像都是3通道,32x32像素的图片。
 下面是对torch神经网络使用的一个实战练习。
下面是对torch神经网络使用的一个实战练习。
训练一个图片分类器
我们要按顺序做这几个步骤:
- 使用torchvision来读取并预处理CIFAR10数据集
- 定义一个卷积神经网络
- 定义一个代价函数
- 在神经网络中训练训练集数据
- 使用测试集数据测试神经网络
1. 读取并预处理CIFAR10
使用torchvision读取CIFAR10相当的方便。
import torchvision
import torchvision.transforms as transforms
# torchvision数据集的输出是在[0, 1]范围内的PILImage图片。
# 我们此处使用归一化的方法将其转化为Tensor,数据范围为[-1, 1]
transform=transforms.Compose([transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5)),
])
trainset = torchvision.datasets.CIFAR10(root='./data', train=True, download=True, transform=transform)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=4,
shuffle=True, num_workers=2)
testset = torchvision.datasets.CIFAR10(root='./data', train=False, download=True, transform=transform)
testloader = torch.utils.data.DataLoader(testset, batch_size=4,
shuffle=False, num_workers=2)
classes = ('plane', 'car', 'bird', 'cat',
'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
'''注:这一部分需要下载部分数据集 因此速度可能会有一些慢 同时你会看到这样的输出
Downloading http://www.cs.toronto.edu/~kriz/cifar-10-python.tar.gz to ./data/cifar-10-python.tar.gz
Extracting tar file
Done!
Files already downloaded and verified
'''
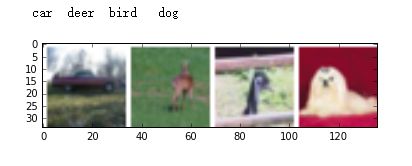
我们来从中找几张图片看看。
# functions to show an image
import matplotlib.pyplot as plt
import numpy as np
%matplotlib inline
def imshow(img):
img = img / 2 + 0.5 # unnormalize
npimg = img.numpy()
plt.imshow(np.transpose(npimg, (1,2,0)))
# show some random training images
dataiter = iter(trainloader)
images, labels = dataiter.next()
# print images
imshow(torchvision.utils.make_grid(images))
# print labels
print(' '.join('%5s'%classes[labels[j]] for j in range(4)))
结果是这样的:
2. 定义一个卷积神经网络
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(3, 6, 5)
self.pool = nn.MaxPool2d(2,2)
self.conv2 = nn.Conv2d(6, 16, 5)
self.fc1 = nn.Linear(16*5*5, 120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10)
def forward(self, x):
x = self.pool(F.relu(self.conv1(x)))
x = self.pool(F.relu(self.conv2(x)))
x = x.view(-1, 16*5*5)
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x
net = Net()
3. 定义代价函数和优化器
criterion = nn.CrossEntropyLoss() # use a Classification Cross-Entropy loss
optimizer = optim.SGD(net.parameters(), lr=0.001, momentum=0.9)
4. 训练网络
事情变得有趣起来了。 我们只需一轮一轮迭代然后不断通过输入来进行参数调整就行了。
for epoch in range(2): # loop over the dataset multiple times
running_loss = 0.0
for i, data in enumerate(trainloader, 0):
# get the inputs
inputs, labels = data
# wrap them in Variable
inputs, labels = Variable(inputs), Variable(labels)
# zero the parameter gradients
optimizer.zero_grad()
# forward + backward + optimize
outputs = net(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
# print statistics
running_loss += loss.data[0]
if i % 2000 == 1999: # print every 2000 mini-batches
print('[%d, %5d] loss: %.3f' % (epoch+1, i+1, running_loss / 2000))
running_loss = 0.0
print('Finished Training')
'''这部分的输出结果为
[1, 2000] loss: 2.212
[1, 4000] loss: 1.892
[1, 6000] loss: 1.681
[1, 8000] loss: 1.590
[1, 10000] loss: 1.515
[1, 12000] loss: 1.475
[2, 2000] loss: 1.409
[2, 4000] loss: 1.394
[2, 6000] loss: 1.376
[2, 8000] loss: 1.334
[2, 10000] loss: 1.313
[2, 12000] loss: 1.264
Finished Training
'''
我们已经训练了两遍了。 此时需要测试一下到底结果如何。
通过对比神经网络给出的分类和已知的类别结果,可以得出正确与否,如果预测的正确,我们可以将样本加入正确预测的结果的列表中。
好的第一步,让我们展示几张照片来熟悉一下。
dataiter = iter(testloader)
images, labels = dataiter.next()
# print images
imshow(torchvision.utils.make_grid(images))
print('GroundTruth: ', ' '.join('%5s'%classes[labels[j]] for j in range(4)))
结果是这样的:
 好的,接下来看看神经网络如何看待这几个照片。
好的,接下来看看神经网络如何看待这几个照片。
outputs = net(Variable(images))
# the outputs are energies for the 10 classes.
# Higher the energy for a class, the more the network
# thinks that the image is of the particular class
# So, let's get the index of the highest energy
_, predicted = torch.max(outputs.data, 1)
print('Predicted: ', ' '.join('%5s'% classes[predicted[j][0]] for j in range(4)))
'''输出结果为
Predicted: cat plane car plane
'''
结果看起来挺好。
看看神经网络在整个数据集上的表现结果如何。
correct = 0
total = 0
for data in testloader:
images, labels = data
outputs = net(Variable(images))
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum()
print('Accuracy of the network on the 10000 test images: %d %%' % (100 * correct / total))
'''输出结果为
Accuracy of the network on the 10000 test images: 54 %
'''
看上去这玩意输出的结果比随机整的要好,随机选择的话从十个中选择一个出来,准确率大概只有10%。
看上去神经网络学到了点东西。
嗯。。。那么到底哪些类别表现良好又是哪些类别不太行呢?
class_correct = list(0. for i in range(10))
class_total = list(0. for i in range(10))
for data in testloader:
images, labels = data
outputs = net(Variable(images))
_, predicted = torch.max(outputs.data, 1)
c = (predicted == labels).squeeze()
for i in range(4):
label = labels[i]
class_correct[label] += c[i]
class_total[label] += 1
for i in range(10):
print('Accuracy of %5s : %2d %%' % (classes[i], 100 * class_correct[i] / class_total[i]))
'''输出结果为
Accuracy of plane : 73 %
Accuracy of car : 70 %
Accuracy of bird : 52 %
Accuracy of cat : 27 %
Accuracy of deer : 34 %
Accuracy of dog : 37 %
Accuracy of frog : 62 %
Accuracy of horse : 72 %
Accuracy of ship : 64 %
Accuracy of truck : 53 %
'''
好吧,接下来该怎么搞了?
我们该如何将神经网络运行在GPU上呢?
在GPU上进行训练
就像你把Tensor传递给GPU进行运算一样,你也可以将神经网络传递给GPU。
这一过程将逐级进行操作,直到所有组件全部都传递到GPU上。
net.cuda()
'''输出结果为
Net (
(conv1): Conv2d(3, 6, kernel_size=(5, 5), stride=(1, 1))
(pool): MaxPool2d (size=(2, 2), stride=(2, 2), dilation=(1, 1))
(conv2): Conv2d(6, 16, kernel_size=(5, 5), stride=(1, 1))
(fc1): Linear (400 -> 120)
(fc2): Linear (120 -> 84)
(fc3): Linear (84 -> 10)
)
'''
记住,每一步都需要把输入和目标传给GPU。
inputs, labels = Variable(inputs.cuda()), Variable(labels.cuda())
我为什么没有进行CPU运算和GPU运算的对比呢?因为神经网络实在太小了,其中的差距并不明显。
目标达成:
- 在更高层级上理解PyTorch的Tensor库和神经网络。
- 训练一个小的神经网络。
接下来我该去哪?
- Train neural nets to play video games
- Train a state-of-the-art ResNet network on imagenet
- Train an face generator using Generative Adversarial Networks
- Train a word-level language model using Recurrent LSTM networks
- More examples
- More tutorials
- Discuss PyTorch on the Forums
- Chat with other users on Slack
Trans by lawbda,edit in 2017.03.05 15:38