通常提取物体的轮廓时,图像都存在噪声,提取效果并不理想。如提取下图的轮廓时,

提取代码:
import cv2
img = cv2.imread("mouse.png")
cv2.imshow("origin",img)
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
ret,binary = cv2.threshold(gray,128,255,cv2.THRESH_BINARY)
cv2.imshow("binary",binary)
contours, hierarchy = cv2.findContours(binary,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
cv2.drawContours(img,contours,-1,(0,0,255),3)
cv2.imshow("result", img)
cv2.waitKey(0)
提取效果:
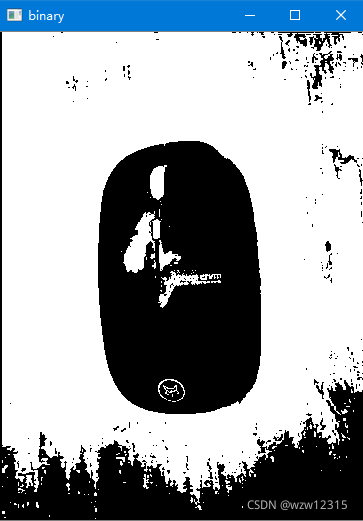

可以看出存在非常严重的噪声干扰。因此,提取轮廓之前需要过滤噪声的干扰。
首先,进行对图像进行均值滤波(低通滤波),去除噪声
blured = cv2.blur(img,(5,5))
cv2.imshow("blur",blured)

使用floodfill来去掉目标周围的背景,泛洪填充类始于ps的魔棒工具,这里用来清除背景。
mask = np.zeros((h+2, w+2), np.uint8) #掩码长和宽都比输入图像多两个像素点,泛洪填充不会超出掩码的非零边缘
#进行泛洪填充
cv2.floodFill(blured, mask, (10,10), (255,255,255), (2,2,2),(3,3,3),8)
cv2.imshow("floodfill", blured)

floodFill函数解析
- img:为待使用泛洪算法的图像
- mask:为掩码层,使用掩码可以规定是在哪个区域使用该算法,如果是对于完整图像都要使用,则掩码层大小为原图行数+2,列数+2.是一个二维的0矩阵,边缘一圈会在使用算法是置为1。而只有对于掩码层上对应为0的位置才能泛洪,所以掩码层初始化为0矩。【dtype:np.uint8】
- seed:为泛洪算法的种子点,也是根据该点的像素判断决定和其相近颜色的像素点,是否被泛洪处理。
- newvalue:是对于泛洪区域新赋的值(B,G,R)
- (loDiff1,loDiff2,loDiff3):是相对于seed种子点像素可以往下的像素值,即seed(B0,G0,R0),泛洪区域下界为(B0-loDiff1,G0-loDiff2,R0-loDiff3)
- (upDiff1,upDiff2,upDiff3):是相对于seed种子点像素可以往上的像素值,即seed(B0,G0,R0),泛洪区域上界为(B0+upDiff1,G0+upDiff2,R0+upDiff3)
- flag:为泛洪算法的处理模式:
- 低八位 控制算法的连通性,是以seed点为中心,接着判断周围的几个像素点,再将泛洪区域像素点周围的几个像素点进行考虑。 一般为4,8;默认为4
- 中间八位 与掩码层赋值密切相关,一般使用(255<<8)使中间8位全位1,则值为255,也就是掩码层对应原图的泛洪区域的部分被由原来的初值0赋值成255,如果中间8位为0,则赋值为1.
- 高八位 由opencv宏参数指定
- cv2.FLOODFILL_FIXED_RANGE:改变图像,填充newvalue
- cv2.FLOODFILL_MASK_ONLY:不改变原图像,也就是newvalue参数失去作用,而是改变对应区域的掩码,设为中间八位的值
然后转换成灰度图
gray = cv2.cvtColor(blured,cv2.COLOR_BGR2GRAY)
cv2.imshow("gray", gray)
此时目标图像周围有写不光滑,还有一些噪声,因此进行开闭运算,得到比较光滑的目标
#定义结构元素
kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(50, 50))
#开闭运算,先开运算去除背景噪声,再继续闭运算填充目标内的孔洞
opened = cv2.morphologyEx(gray, cv2.MORPH_OPEN, kernel)
closed = cv2.morphologyEx(opened, cv2.MORPH_CLOSE, kernel)
cv2.imshow("closed", closed)
接着转换成二值图以便于获取图像的轮廓
最后进行轮廓提取,抓取到目标
#找到轮廓
_,contours, hierarchy = cv2.findContours(binary,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
#绘制轮廓
cv2.drawContours(img,contours,-1,(0,0,255),3)
#绘制结果
cv2.imshow("result", img)
全部代码:
#coding=utf-8
import cv2
import numpy as np
img = cv2.imread("temp.jpg") #载入图像
h, w = img.shape[:2] #获取图像的高和宽
cv2.imshow("Origin", img) #显示原始图像
blured = cv2.blur(img,(5,5)) #进行滤波去掉噪声
cv2.imshow("Blur", blured) #显示低通滤波后的图像
mask = np.zeros((h+2, w+2), np.uint8) #掩码长和宽都比输入图像多两个像素点,满水填充不会超出掩码的非零边缘
#进行泛洪填充
cv2.floodFill(blured, mask, (w-1,h-1), (255,255,255), (2,2,2),(3,3,3),8)
cv2.imshow("floodfill", blured)
#得到灰度图
gray = cv2.cvtColor(blured,cv2.COLOR_BGR2GRAY)
cv2.imshow("gray", gray)
#定义结构元素
kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(50, 50))
#开闭运算,先开运算去除背景噪声,再继续闭运算填充目标内的孔洞
opened = cv2.morphologyEx(gray, cv2.MORPH_OPEN, kernel)
closed = cv2.morphologyEx(opened, cv2.MORPH_CLOSE, kernel)
cv2.imshow("closed", closed)
#求二值图
ret, binary = cv2.threshold(closed,250,255,cv2.THRESH_BINARY)
cv2.imshow("binary", binary)
#找到轮廓
_,contours, hierarchy = cv2.findContours(binary,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
#绘制轮廓
cv2.drawContours(img,contours,-1,(0,0,255),3)
#绘制结果
cv2.imshow("result", img)
cv2.waitKey(0)
cv2.destroyAllWindows()
总结
到此这篇关于如何使用Python OpenCV提取物体轮廓的文章就介绍到这了,更多相关Python OpenCV提取物体轮廓内容请搜索脚本之家以前的文章或继续浏览下面的相关文章希望大家以后多多支持脚本之家!