yolov5动态链接库DLL导出(TensorRT)
延续上一篇tTensorRT部署yolov5,大家可以使用生成的yolov5.exe进行终端命令或者VS里面使用命令代码进行检测,但是这样看起来很繁琐很臃肿,有些同学想调用他做一个QT界面啥的,直接调用这个dll就可以进行推理又方便还很快,大家也可以去原博主下面查看,
首选i保证你看了我的第一篇tensort推理yolov5,我们打开cmake编译程序的工程目录:
一.文件创建:
导出库必要文件:dllmain.cpp,framework.h,就在当前工程下面建立这两个文件
// dllmain.cpp : 定义 DLL 应用程序的入口点。
#pragma once
#include "pch.h"
BOOL APIENTRY DllMain(HMODULE hModule,
DWORD ul_reason_for_call,
LPVOID lpReserved
)
{
switch (ul_reason_for_call)
{
case DLL_PROCESS_ATTACH:
case DLL_THREAD_ATTACH:
case DLL_THREAD_DETACH:
case DLL_PROCESS_DETACH:
break;
}
return TRUE;
}
// framework.h
#pragma once
#define WIN32_LEAN_AND_MEAN // 从 Windows 头文件中排除极少使用的内容
// Windows 头文件
#include
新建导出类文件:pch.h,Detection.h,Detection.cpp
文件:pch.h 声明虚基类,定义了模型参数宏:
//hcp.h
#pragma once
#ifndef PCH_H
#define PCH_H
// 添加要在此处预编译的标头
#include "framework.h"
#include
#include
#include
#include
#include
#include
#include
#define USE_FP16 // set USE_INT8 or USE_FP16 or USE_FP32
#define DEVICE 0 // GPU id
#define NMS_THRESH 0.4
#define CONF_THRESH 0.5
#define BATCH_SIZE 1
#define CLASS_DECLSPEC __declspec(dllexport)//表示这里要把类导出//
struct Net_config
{
float gd; // engine threshold
float gw; // engine threshold
const char* netname;
};
class CLASS_DECLSPEC YOLOV5
{
public:
YOLOV5() {};
virtual ~YOLOV5() {};
public:
virtual void Initialize(const char* model_path, int num) = 0;
virtual int Detecting(cv::Mat& frame, std::vector& Boxes, std::vector& ClassLables) = 0;
};
#endif //PCH_H
导出类头文件:Detection.h,声明导出类,声明关联类导出类与虚基类,
大家注意下这里的类别和类别数量根据自己训练的情况来定,如果是官网80类,则把类别复制过来,
//Detection.h
#pragma once
#include "pch.h"
#include "yololayer.h"
#include
#include "cuda_utils.h"
#include "logging.h"
#include "common.hpp"
#include "utils.h"
#include "calibrator.h"
class CLASS_DECLSPEC Connect
{
public:
Connect();
~Connect();
public:
YOLOV5* Create_YOLOV5_Object();
void Delete_YOLOV5_Object(YOLOV5* _bp);
};
class Detection :public YOLOV5
{
public:
Detection();
~Detection();
void Initialize(const char* model_path, int num);
void setClassNum(int num);
int Detecting(cv::Mat& frame, std::vector& Boxes, std::vector& ClassLables);
private:
char netname[20] = { 0 };
float gd = 0.0f, gw = 0.0f;
const char* classes[2] = { "J_Deformation", "J_Splitting" };
Net_config yolo_nets[4] = {
{0.33, 0.50, "yolov5s"},
{0.67, 0.75, "yolov5m"},
{1.00, 1.00, "yolov5l"},
{1.33, 1.25, "yolov5x"}
};
int CLASS_NUM = 2;
float data[1 * 3 * 640 * 640];
float prob[1 * 6001];
size_t size = 0;
int inputIndex = 0;
int outputIndex = 0;
char* trtModelStream = nullptr;
void* buffers[2] = { 0 };
nvinfer1::IExecutionContext* context;
cudaStream_t stream;
nvinfer1::IRuntime* runtime;
nvinfer1::ICudaEngine* engine;
};
Detection.cpp 实现导出类,实现关联类导出类与虚基类
//Detection.cpp
#pragma once
#include "pch.h"
#include "Detection.h"
using namespace std;
static const int INPUT_H = Yolo::INPUT_H;
static const int INPUT_W = Yolo::INPUT_W;
static const int OUTPUT_SIZE = Yolo::MAX_OUTPUT_BBOX_COUNT * sizeof(Yolo::Detection) / sizeof(float) + 1; // we assume the yololayer outputs no more than MAX_OUTPUT_BBOX_COUNT boxes that conf >= 0.1
const char* INPUT_BLOB_NAME = "data";
const char* OUTPUT_BLOB_NAME = "prob";
static Logger gLogger;
static int get_width(int x, float gw, int divisor = 8) {
//return math.ceil(x / divisor) * divisor
if (int(x * gw) % divisor == 0) {
return int(x * gw);
}
return (int(x * gw / divisor) + 1) * divisor;
}
static int get_depth(int x, float gd) {
if (x == 1) {
return 1;
}
else {
return round(x * gd) > 1 ? round(x * gd) : 1;
}
}
ICudaEngine* build_engine(unsigned int maxBatchSize, IBuilder* builder, IBuilderConfig* config, DataType dt, float& gd, float& gw, std::string& wts_name) {
INetworkDefinition* network = builder->createNetworkV2(0U);
// Create input tensor of shape {3, INPUT_H, INPUT_W} with name INPUT_BLOB_NAME
ITensor* data = network->addInput(INPUT_BLOB_NAME, dt, Dims3{ 3, INPUT_H, INPUT_W });
assert(data);
std::map weightMap = loadWeights(wts_name);
/* ------ yolov5 backbone------ */
auto focus0 = focus(network, weightMap, *data, 3, get_width(64, gw), 3, "model.0");
auto conv1 = convBlock(network, weightMap, *focus0->getOutput(0), get_width(128, gw), 3, 2, 1, "model.1");
auto bottleneck_CSP2 = C3(network, weightMap, *conv1->getOutput(0), get_width(128, gw), get_width(128, gw), get_depth(3, gd), true, 1, 0.5, "model.2");
auto conv3 = convBlock(network, weightMap, *bottleneck_CSP2->getOutput(0), get_width(256, gw), 3, 2, 1, "model.3");
auto bottleneck_csp4 = C3(network, weightMap, *conv3->getOutput(0), get_width(256, gw), get_width(256, gw), get_depth(9, gd), true, 1, 0.5, "model.4");
auto conv5 = convBlock(network, weightMap, *bottleneck_csp4->getOutput(0), get_width(512, gw), 3, 2, 1, "model.5");
auto bottleneck_csp6 = C3(network, weightMap, *conv5->getOutput(0), get_width(512, gw), get_width(512, gw), get_depth(9, gd), true, 1, 0.5, "model.6");
auto conv7 = convBlock(network, weightMap, *bottleneck_csp6->getOutput(0), get_width(1024, gw), 3, 2, 1, "model.7");
auto spp8 = SPP(network, weightMap, *conv7->getOutput(0), get_width(1024, gw), get_width(1024, gw), 5, 9, 13, "model.8");
/* ------ yolov5 head ------ */
auto bottleneck_csp9 = C3(network, weightMap, *spp8->getOutput(0), get_width(1024, gw), get_width(1024, gw), get_depth(3, gd), false, 1, 0.5, "model.9");
auto conv10 = convBlock(network, weightMap, *bottleneck_csp9->getOutput(0), get_width(512, gw), 1, 1, 1, "model.10");
auto upsample11 = network->addResize(*conv10->getOutput(0));
assert(upsample11);
upsample11->setResizeMode(ResizeMode::kNEAREST);
upsample11->setOutputDimensions(bottleneck_csp6->getOutput(0)->getDimensions());
ITensor* inputTensors12[] = { upsample11->getOutput(0), bottleneck_csp6->getOutput(0) };
auto cat12 = network->addConcatenation(inputTensors12, 2);
auto bottleneck_csp13 = C3(network, weightMap, *cat12->getOutput(0), get_width(1024, gw), get_width(512, gw), get_depth(3, gd), false, 1, 0.5, "model.13");
auto conv14 = convBlock(network, weightMap, *bottleneck_csp13->getOutput(0), get_width(256, gw), 1, 1, 1, "model.14");
auto upsample15 = network->addResize(*conv14->getOutput(0));
assert(upsample15);
upsample15->setResizeMode(ResizeMode::kNEAREST);
upsample15->setOutputDimensions(bottleneck_csp4->getOutput(0)->getDimensions());
ITensor* inputTensors16[] = { upsample15->getOutput(0), bottleneck_csp4->getOutput(0) };
auto cat16 = network->addConcatenation(inputTensors16, 2);
auto bottleneck_csp17 = C3(network, weightMap, *cat16->getOutput(0), get_width(512, gw), get_width(256, gw), get_depth(3, gd), false, 1, 0.5, "model.17");
// yolo layer 0
IConvolutionLayer* det0 = network->addConvolutionNd(*bottleneck_csp17->getOutput(0), 3 * (Yolo::CLASS_NUM + 5), DimsHW{ 1, 1 }, weightMap["model.24.m.0.weight"], weightMap["model.24.m.0.bias"]);
auto conv18 = convBlock(network, weightMap, *bottleneck_csp17->getOutput(0), get_width(256, gw), 3, 2, 1, "model.18");
ITensor* inputTensors19[] = { conv18->getOutput(0), conv14->getOutput(0) };
auto cat19 = network->addConcatenation(inputTensors19, 2);
auto bottleneck_csp20 = C3(network, weightMap, *cat19->getOutput(0), get_width(512, gw), get_width(512, gw), get_depth(3, gd), false, 1, 0.5, "model.20");
//yolo layer 1
IConvolutionLayer* det1 = network->addConvolutionNd(*bottleneck_csp20->getOutput(0), 3 * (Yolo::CLASS_NUM + 5), DimsHW{ 1, 1 }, weightMap["model.24.m.1.weight"], weightMap["model.24.m.1.bias"]);
auto conv21 = convBlock(network, weightMap, *bottleneck_csp20->getOutput(0), get_width(512, gw), 3, 2, 1, "model.21");
ITensor* inputTensors22[] = { conv21->getOutput(0), conv10->getOutput(0) };
auto cat22 = network->addConcatenation(inputTensors22, 2);
auto bottleneck_csp23 = C3(network, weightMap, *cat22->getOutput(0), get_width(1024, gw), get_width(1024, gw), get_depth(3, gd), false, 1, 0.5, "model.23");
IConvolutionLayer* det2 = network->addConvolutionNd(*bottleneck_csp23->getOutput(0), 3 * (Yolo::CLASS_NUM + 5), DimsHW{ 1, 1 }, weightMap["model.24.m.2.weight"], weightMap["model.24.m.2.bias"]);
auto yolo = addYoLoLayer(network, weightMap, det0, det1, det2);
yolo->getOutput(0)->setName(OUTPUT_BLOB_NAME);
network->markOutput(*yolo->getOutput(0));
// Build engine
builder->setMaxBatchSize(maxBatchSize);
config->setMaxWorkspaceSize(16 * (1 << 20)); // 16MB
#if defined(USE_FP16)
config->setFlag(BuilderFlag::kFP16);
#elif defined(USE_INT8)
std::cout << "Your platform support int8: " << (builder->platformHasFastInt8() ? "true" : "false") << std::endl;
assert(builder->platformHasFastInt8());
config->setFlag(BuilderFlag::kINT8);
Int8EntropyCalibrator2* calibrator = new Int8EntropyCalibrator2(1, INPUT_W, INPUT_H, "./coco_calib/", "int8calib.table", INPUT_BLOB_NAME);
config->setInt8Calibrator(calibrator);
#endif
std::cout << "Building engine, please wait for a while..." << std::endl;
ICudaEngine* engine = builder->buildEngineWithConfig(*network, *config);
std::cout << "Build engine successfully!" << std::endl;
// Don't need the network any more
network->destroy();
// Release host memory
for (auto& mem : weightMap)
{
free((void*)(mem.second.values));
}
return engine;
}
void APIToModel(unsigned int maxBatchSize, IHostMemory** modelStream, float& gd, float& gw, std::string& wts_name) {
// Create builder
IBuilder* builder = createInferBuilder(gLogger);
IBuilderConfig* config = builder->createBuilderConfig();
// Create model to populate the network, then set the outputs and create an engine
ICudaEngine* engine = build_engine(maxBatchSize, builder, config, DataType::kFLOAT, gd, gw, wts_name);
assert(engine != nullptr);
// Serialize the engine
(*modelStream) = engine->serialize();
// Close everything down
engine->destroy();
builder->destroy();
config->destroy();
}
inline void doInference(IExecutionContext& context, cudaStream_t& stream, void** buffers, float* input, float* output, int batchSize) {
// DMA input batch data to device, infer on the batch asynchronously, and DMA output back to host
CUDA_CHECK(cudaMemcpyAsync(buffers[0], input, batchSize * 3 * INPUT_H * INPUT_W * sizeof(float), cudaMemcpyHostToDevice, stream));
context.enqueue(batchSize, buffers, stream, nullptr);
CUDA_CHECK(cudaMemcpyAsync(output, buffers[1], batchSize * OUTPUT_SIZE * sizeof(float), cudaMemcpyDeviceToHost, stream));
cudaStreamSynchronize(stream);
}
void Detection::Initialize(const char* model_path, int num)
{
if (num < 0 || num>3) {
cout << "=================="
"0, yolov5s"
"1, yolov5m"
"2, yolov5l"
"3, yolov5x" << endl;
return;
}
cout << "Net use :" << yolo_nets[num].netname << endl;
this->gd = yolo_nets[num].gd;
this->gw = yolo_nets[num].gw;
//初始化GPU引擎
cudaSetDevice(DEVICE);
std::ifstream file(model_path, std::ios::binary);
if (!file.good()) {
std::cerr << "read " << model_path << " error!" << std::endl;
return;
}
file.seekg(0, file.end);
size = file.tellg(); //统计模型字节流大小
file.seekg(0, file.beg);
trtModelStream = new char[size]; // 申请模型字节流大小的空间
assert(trtModelStream);
file.read(trtModelStream, size); // 读取字节流到trtModelStream
file.close();
// prepare input data ------NCHW---------------------
runtime = createInferRuntime(gLogger);
assert(runtime != nullptr);
engine = runtime->deserializeCudaEngine(trtModelStream, size);
assert(engine != nullptr);
context = engine->createExecutionContext();
assert(context != nullptr);
delete[] trtModelStream;
assert(engine->getNbBindings() == 2);
inputIndex = engine->getBindingIndex(INPUT_BLOB_NAME);
outputIndex = engine->getBindingIndex(OUTPUT_BLOB_NAME);
assert(inputIndex == 0);
assert(outputIndex == 1);
// Create GPU buffers on device
CUDA_CHECK(cudaMalloc(&buffers[inputIndex], BATCH_SIZE * 3 * INPUT_H * INPUT_W * sizeof(float)));
CUDA_CHECK(cudaMalloc(&buffers[outputIndex], BATCH_SIZE * OUTPUT_SIZE * sizeof(float)));
CUDA_CHECK(cudaStreamCreate(&stream));
std::cout << "Engine Initialize successfully!" << endl;
}
void Detection::setClassNum(int num)
{
CLASS_NUM = num;
}
int Detection::Detecting(cv::Mat& img, std::vector& Boxes, std::vector& ClassLables)
{
if (img.empty()) {
std::cout << "read image failed!" << std::endl;
return -1;
}
if (img.rows < 640 || img.cols < 640) {
std::cout << "img.rows: "<< img.rows <<"\timg.cols: "<< img.cols << std::endl;
std::cout << "image height<640||width<640!" << std::endl;
return -1;
}
cv::Mat pr_img = preprocess_img(img, INPUT_W, INPUT_H); // letterbox BGR to RGB
int i = 0;
for (int row = 0; row < INPUT_H; ++row) {
uchar* uc_pixel = pr_img.data + row * pr_img.step;
for (int col = 0; col < INPUT_W; ++col) {
data[i] = (float)uc_pixel[2] / 255.0;
data[i + INPUT_H * INPUT_W] = (float)uc_pixel[1] / 255.0;
data[i + 2 * INPUT_H * INPUT_W] = (float)uc_pixel[0] / 255.0;
uc_pixel += 3;
++i;
}
}
// Run inference
auto start = std::chrono::system_clock::now();
doInference(*context, stream, buffers, data, prob, BATCH_SIZE);
auto end = std::chrono::system_clock::now();
std::cout << std::chrono::duration_cast(end - start).count() << "ms" << std::endl;
std::vector batch_res;
nms(batch_res, &prob[0], CONF_THRESH, NMS_THRESH);
for (size_t j = 0; j < batch_res.size(); j++) {
cv::Rect r = get_rect(img, batch_res[j].bbox);
Boxes.push_back(r);
ClassLables.push_back(classes[(int)batch_res[j].class_id]);
cv::rectangle(img, r, cv::Scalar(0x27, 0xC1, 0x36), 2);
cv::putText(
img,
classes[(int)batch_res[j].class_id],
cv::Point(r.x, r.y - 2),
cv::FONT_HERSHEY_COMPLEX,
1.8,
cv::Scalar(0xFF, 0xFF, 0xFF),
2
);
}
return 0;
}
Detection::Detection() {}
Detection::~Detection()
{
// Release stream and buffers
cudaStreamDestroy(stream);
CUDA_CHECK(cudaFree(buffers[inputIndex]));
CUDA_CHECK(cudaFree(buffers[outputIndex]));
// Destroy the engine
context->destroy();
engine->destroy();
runtime->destroy();
}
Connect::Connect()
{}
Connect::~Connect()
{}
YOLOV5* Connect::Create_YOLOV5_Object()
{
return new Detection; //注意此处
}
void Connect::Delete_YOLOV5_Object(YOLOV5* _bp)
{
if (_bp)
delete _bp;
}
二.编译
1、修改CMakeLists.txt 修改生成目标为动态链接库。(这里去掉了yolov5.cpp,并新增了新建的文件)
#修改前
add_executable(yolov5 ${PROJECT_SOURCE_DIR}/yolov5.cpp ${PROJECT_SOURCE_DIR}/common.hpp ${PROJECT_SOURCE_DIR}/yololayer.cu ${PROJECT_SOURCE_DIR}/yololayer.h)
#修改后
add_library(yolov5 SHARED ${PROJECT_SOURCE_DIR}/common.hpp ${PROJECT_SOURCE_DIR}/yololayer.cu ${PROJECT_SOURCE_DIR}/yololayer.h "Detection.h" "Detection.cpp" "framework.h" "dllmain.cpp" )
大家可以新建一个文件夹build_dll:打开cmake
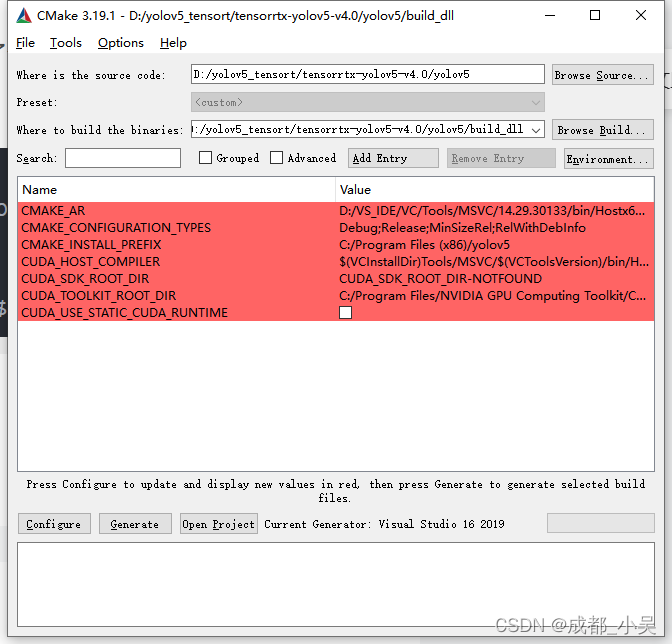
编译完configure---Generate----open project进行realses和debug编译:
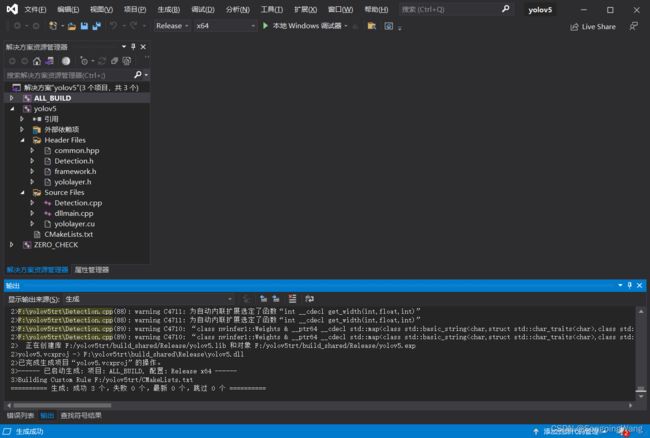
编译完成后出现无法启动程序大家可以不用管,打开自己的build_dll:
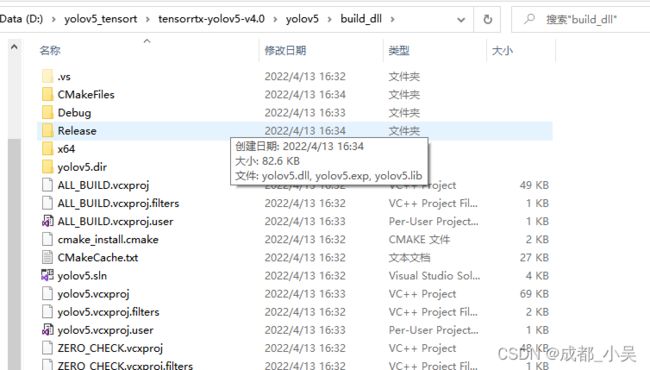
release:会出现我们生成的dll:
三.测试
然后大家就可以VS新建自己的项目main.cpp,
将上面三个文件放入此工程中:以及yolov5s.engine权重和图片,
大家将下面代码复制到main.cpp中:这里的Detection.h和dirent.h根据自己的路径添加:
#pragma once
#include
#include
#include
#include "D:/yolov5_tensort/tensorrtx-yolov5-v4.0/yolov5/Detection.h"
#include "D:/yolov5_tensort/tensorrtx-yolov5-v4.0/yolov5/dirent.h"
#include "yololayer.h"
int main()
{
Connect connect;
YOLOV5* yolo_dll = connect.Create_YOLOV5_Object();
cv::VideoCapture capture(0);
if (!capture.isOpened()) {
std::cout << "Error opening video stream or file" << std::endl;
return -1;
}
yolo_dll->Initialize("./yolov5s.engine", 0);
while (1)
{
cv::Mat frame;
capture >> frame;
vector Boxes;
vector ClassLables;
yolo_dll->Detecting(frame, Boxes, ClassLables);
cv::imshow("output", frame);
cv::waitKey(1);
}
connect.Delete_YOLOV5_Object(yolo_dll);
return 0;
}
现在我们要配置包含目录、库目录、附加依赖项。
#将此路径加入项目属性包含目录中
D:\yolov5_tensort\tensorrtx-yolov5-v4.0\yolov5
#将此路径加入项目属性的库目录中,也就是我们刚刚生成dll的文件目录
D:\yolov5_tensort\tensorrtx-yolov5-v4.0\yolov5\build_dll\Release
#在输入链接器添加依赖库
yolov5.dll四.问题解决
1.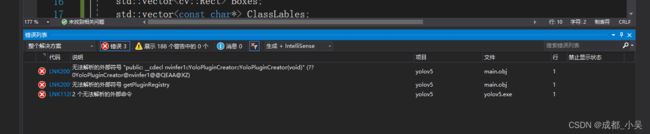
网上很多方法都试过感觉没有什么用:第一个错误我分析为没有相关的依赖库导入,所以我就把tensort的库全部导入:
opencv_world341.lib
opencv_world341d.lib
cudart.lib
cudart_static.lib
yolov5.lib
myelin64_1.lib
nvinfer.lib
nvinfer_plugin.lib
nvonnxparser.lib
nvparsers.lib再次运行之后发现第一个确实不报错了:
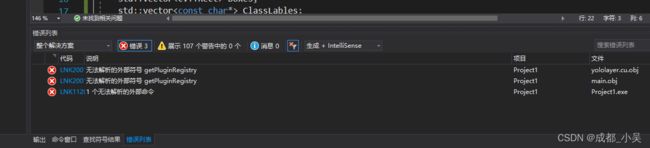 大胆的猜想误打误撞将yololayer.cu导入到文件中,并配置为cuda/c++
大胆的猜想误打误撞将yololayer.cu导入到文件中,并配置为cuda/c++
此时代码可以运行了但是还是出错:
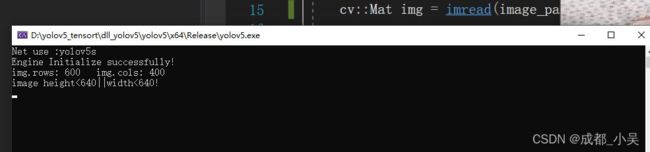
说明模型是初始化了,但是在检测的时候出错了,我们进入源码看一看:detection.cpp
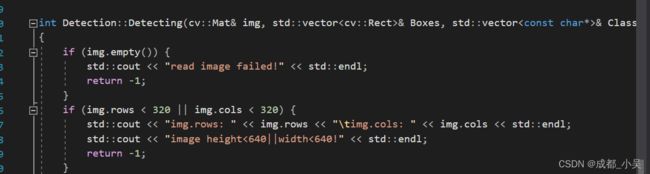
原来是这里大哥把图片大小设置了我们把这里改成320:
再次运行发现还是检测部分出现错误:
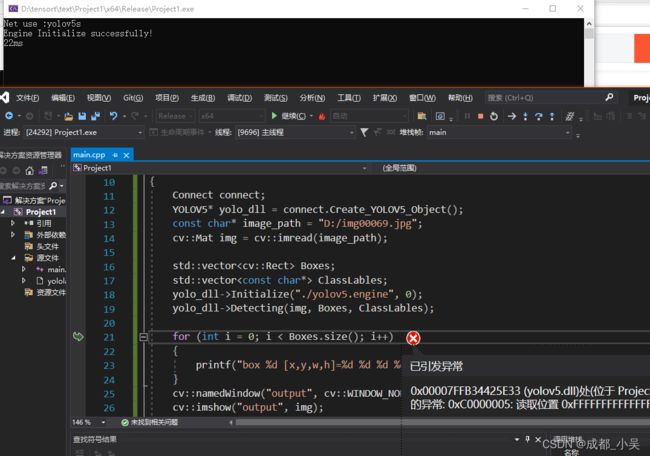
传入的classlables错误,OK检测视频,调用摄像头没问题,把这两个注释掉:

差不多问题解决了可以运行了;
测试视频、照片、摄像头大家直接用opencv就可以实现。
1
大家可以在QT上面使用,设计一个界面很NICE。感谢大家有什么建议进群交流:135163517