自动驾驶规划控制(A*、纯跟踪(pure pursuit)、LQR算法在用c++在ubuntu和ros环境下实现)
文章目录
- 1 目录概述
- 2 算法介绍
-
- 2.1 Astart改进
- 2.2 ROS(Gazebo仿真)
-
- 2.2.1 使用Gazebo仿真需要安装的功能包
- 2.2.2 创建工作空间 catkin_ws
- 2.2.3 Pure_pursuit算法
- 2.2.4 LQR横向控制算法
最近在学习自动驾驶规划控制相关内容,并着手用c++和ros编写相关算法,代码部分见GitHub:https://github.com/NeXTzhao/routing_planning.git,下面是对github内容的一些说明。
1 目录概述
routing_planning/Astart改进
针对A*算法做出优化:加入靠近路沿的启发函数,并对生成的轨迹点做了均值滤波处理,使轨迹更加平滑。
routing_planning/ros/src
ros工作空间中,purepursuit功能包使用purepursuit算法对spline生成的样条曲线进行了路径跟踪。lqr_steering功能包使用lqr算法对生成的五次多项式轨迹进行横向路径跟踪。
purepursuit算法:原理很简单,网上很多资料也比较多
LQR控制算法主要参考b站up主
2 算法介绍
2.1 Astart改进
编译:g++ -std=c++11 xxx.cpp -o xx $(pkg-config --cflags --libs opencv) (需要安装opencv)
实现思路:
先用opencv将图片做灰度处理,再做二值化,将像素保存到vector二维数组作为地图,设置起点和终点,调用AStart算法(改进版:加入路沿代价函数)找到一条路径,由于算法会导致路径出现锯齿状,故用均值滤波对路径点做平滑处理。
算法流程:
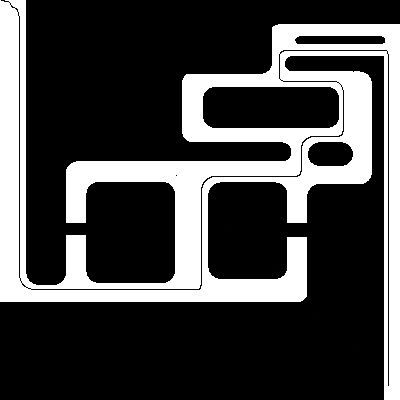
- 原始地图:

- A*算法生成的路径不平滑且贴近路沿,故增加道路膨胀层并加入靠近路沿的启发函数:


- 利用均值滤波对路径做平滑处理并加大膨胀半径:
2.2 ROS(Gazebo仿真)
系统要求:ubuntu + ros +gazebo
2.2.1 使用Gazebo仿真需要安装的功能包
sudo apt-get install -y ros-(对应的ros版本,例如kinetic,下面两个同理)-gazebo-ros-control
sudo apt-get install -y ros-kinetic-ros-control ros-kinetic-ros-controllers
sudo apt-get install -y ros-kinetic-gazebo-ros-control
2.2.2 创建工作空间 catkin_ws
1.创建src文件,放置功能包源码:
mkdir -p ~/catkin_ws/src
2.进入src文件夹
cd ~/catkin_ws/src
3.将路径ros/src下的功能包复制粘贴到创建的src目录下
4.初始化文件夹
catkin_init_workspace
5.编译工作空间catkin_make
cd ~/catkin_ws/
catkin_make
2.2.3 Pure_pursuit算法
实现思路
- 运用spline插值进行简单轨迹生成
- 编写pure_pursuit纯路径跟踪算法,对生成的轨迹进行跟踪
代码部分
/**
* @file purepursuit.cpp
*/
#include bestPoints_ = {pointNum - 1};
/*方案二*/
vector<float> bestPoints_ = {0.0};
//计算发送给模型车的转角
void poseCallback(const geometry_msgs::PoseStamped ¤tWaypoint) {
auto currentPositionX = currentWaypoint.pose.position.x;
auto currentPositionY = currentWaypoint.pose.position.y;
auto currentPositionZ = 0.0;
auto currentQuaternionX = currentWaypoint.pose.orientation.x;
auto currentQuaternionY = currentWaypoint.pose.orientation.y;
auto currentQuaternionZ = currentWaypoint.pose.orientation.z;
auto currentQuaternionW = currentWaypoint.pose.orientation.w;
std::array<float, 3> calRPY =
calQuaternionToEuler(currentQuaternionX, currentQuaternionY,
currentQuaternionZ, currentQuaternionW);
/*************************************************************************************************
// 方案一:通过累加路径距离,和预瞄距离进行比较以及夹角方向
// 寻找匹配目标点
for (int i = 0; i < pointNum; i++) {
float lad = 0.0; //累加前视距离
float next_x = r_x_[i + 1];
float next_y = r_y_[i + 1];
lad += sqrt(pow(next_x - currentPositionX, 2) +
pow(next_y - currentPositionY, 2));
// cos(aAngle)判断方向
float aAngle =
atan2(next_y - currentPositionY, next_x - currentPositionX) -
calRPY[2];
if (lad > preview_dis && cos(aAngle) >= 0) {
targetIndex = i + 1;
bestPoints_.push_back(targetIndex);
break;
}
}
// 取容器中的最大值
int index = *max_element(bestPoints_.begin(), bestPoints_.end());
***************************************************************************************************/
/**************************************************************************************************/
// 方案二:通过计算当前坐标和目标轨迹距离,找到一个最小距离的索引号
int index;
vector<float> bestPoints_;
for (int i = 0; i < pointNum; i++) {
// float lad = 0.0;
float path_x = r_x_[i];
float path_y = r_y_[i];
// 遍历所有路径点和当前位置的距离,保存到数组中
float lad = sqrt(pow(path_x - currentPositionX, 2) +
pow(path_y - currentPositionY, 2));
bestPoints_.push_back(lad);
}
// 找到数组中最小横向距离
auto smallest = min_element(bestPoints_.begin(), bestPoints_.end());
// 找到最小横向距离的索引位置
index = distance(bestPoints_.begin(), smallest);
int temp_index;
for (int i = index; i < pointNum; i++) {
//遍历路径点和预瞄点的距离,从最小横向位置的索引开始
float dis =
sqrt(pow(r_y_[index] - r_y_[i], 2) + pow(r_x_[index] - r_x_[i], 2));
//判断跟预瞄点的距离
if (dis < preview_dis) {
temp_index = i;
} else {
break;
}
}
index = temp_index;
/**************************************************************************************************/
float alpha =
atan2(r_y_[index] - currentPositionY, r_x_[index] - currentPositionX) -
calRPY[2];
// 当前点和目标点的距离Id
float dl = sqrt(pow(r_y_[index] - currentPositionY, 2) +
pow(r_x_[index] - currentPositionX, 2));
// 发布小车运动指令及运动轨迹
if (dl > 0.2) {
float theta = atan(2 * Ld * sin(alpha) / dl);
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 3;
vel_msg.angular.z = theta;
purepersuit_.publish(vel_msg);
// 发布小车运动轨迹
geometry_msgs::PoseStamped this_pose_stamped;
this_pose_stamped.pose.position.x = currentPositionX;
this_pose_stamped.pose.position.y = currentPositionY;
geometry_msgs::Quaternion goal_quat = tf::createQuaternionMsgFromYaw(theta);
this_pose_stamped.pose.orientation.x = currentQuaternionX;
this_pose_stamped.pose.orientation.y = currentQuaternionY;
this_pose_stamped.pose.orientation.z = currentQuaternionZ;
this_pose_stamped.pose.orientation.w = currentQuaternionW;
this_pose_stamped.header.stamp = ros::Time::now();
this_pose_stamped.header.frame_id = "world";
path.poses.push_back(this_pose_stamped);
} else {
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 0;
vel_msg.angular.z = 0;
purepersuit_.publish(vel_msg);
}
path_pub_.publish(path);
}
void velocityCall(const geometry_msgs::TwistStamped &carWaypoint) {
// carVelocity = carWaypoint.linear.x;
carVelocity = carWaypoint.twist.linear.x;
preview_dis = k * carVelocity + PREVIEW_DIS;
}
void pointCallback(const nav_msgs::Path &msg) {
// geometry_msgs/PoseStamped[] poses
pointNum = msg.poses.size();
// auto a = msg.poses[0].pose.position.x;
for (int i = 0; i < pointNum; i++) {
r_x_.push_back(msg.poses[i].pose.position.x);
r_y_.push_back(msg.poses[i].pose.position.y);
}
int main(int argc, char **argv) {
//创建节点
ros::init(argc, argv, "pure_pursuit");
//创建节点句柄
ros::NodeHandle n;
//创建Publisher,发送经过pure_pursuit计算后的转角及速度
purepersuit_ = n.advertise<geometry_msgs::Twist>("/smart/cmd_vel", 20);
path_pub_ = n.advertise<nav_msgs::Path>("rvizpath", 100, true);
// ros::Rate loop_rate(10);
path.header.frame_id = "world";
// 设置时间戳
path.header.stamp = ros::Time::now();
geometry_msgs::PoseStamped pose;
pose.header.stamp = ros::Time::now();
// 设置参考系
pose.header.frame_id = "world";
ros::Subscriber splinePath = n.subscribe("/splinepoints", 20, pointCallback);
ros::Subscriber carVel = n.subscribe("/smart/velocity", 20, velocityCall);
ros::Subscriber carPose = n.subscribe("/smart/rear_pose", 20, poseCallback);
ros::spin();
return 0;
}
操作步骤:(新开终端窗口)
source devel/setup.sh
roslaunch car_model spawn_car.launch
roslaunch purepursuit splinepath.launch
roslaunch purepursuit purepursuit.launch
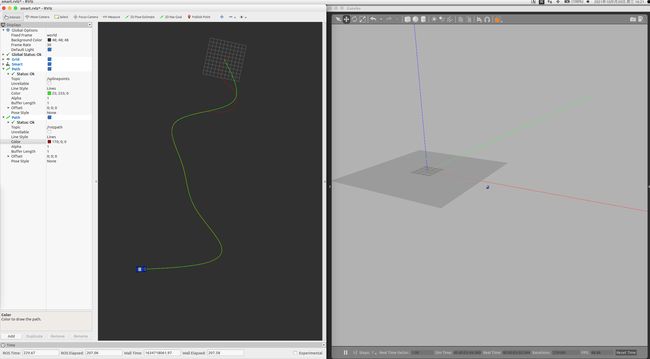
rviz 中add /splinepoints /rvizpath /smart(在rviz显示中,红色为小车运动轨迹,绿色为规划模块给出的轨迹)
Pure_pursuit仿真结果:
2.2.4 LQR横向控制算法
实现思路
- 运用五次多项式生成控制算法所需要的轨迹
- 编写lqr路径跟踪算法,对轨迹进行跟踪控制
代码部分
/**
* @file frenetlqr.cpp
*/
#include
*/
std::array<double, 3> calQuaternionToEuler(const double x, const double y,
const double z, const double w) {
std::array<double, 3> calRPY = {(0, 0, 0)};
// roll = atan2(2(wx+yz),1-2(x*x+y*y))
calRPY[0] = atan2(2 * (w * x + y * z), 1 - 2 * (x * x + y * y));
// pitch = arcsin(2(wy-zx))
calRPY[1] = asin(2 * (w * y - z * x));
// yaw = atan2(2(wx+yz),1-2(y*y+z*z))
calRPY[2] = atan2(2 * (w * z + x * y), 1 - 2 * (y * y + z * z));
return calRPY;
}
/**************************************************************************/
/**
* @brief 规划路径
*
*/
FrenetPath fp;
void calc_frenet_paths() {
// 纵向
QuinticPolynomial lon_qp(x_start[0], x_start[1], x_start[2], x_end[0],
x_end[1], x_end[2], T);
// 横向
QuinticPolynomial lat_qp(y_start[0], y_start[1], y_start[2], y_end[0],
y_end[1], y_end[2], T, xend);
for (double t = 0; t < T; t += DT) {
double x = lon_qp.calc_point_x(t);
double xd = lon_qp.calc_point_xd(t);
double xdd = lon_qp.calc_point_xdd(t);
fp.t.push_back(t);
fp.x.push_back(x);
fp.x_d.push_back(xd);
fp.x_dd.push_back(xdd);
double y_x_t = lat_qp.calc_point_y_x(x);
double y_x_d = lat_qp.calc_point_y_x_d(x);
double y_x_t_d = lat_qp.calc_point_y_t_d(y_x_d, xd);
double y_x_dd = lat_qp.calc_point_y_x_dd(x);
double y_x_t_dd = lat_qp.calc_point_y_t_dd(y_x_dd, xd, y_x_d, xdd);
fp.y.push_back(y_x_t);
fp.y_d.push_back(y_x_t_d);
fp.y_dd.push_back(y_x_t_dd);
// 压入航向角
// fp.threat.push_back(lat_qp.calc_point_thetar(y_x_t_d, xd));
// 压入曲率
fp.k.push_back(lat_qp.calc_point_k(y_x_dd, y_x_d));
// fp.k.push_back(lat_qp.calc_point_k(y_x_t_dd, y_x_t_d, xdd, xd));
}
int num = fp.x.size();
for (int i = 0; i < num; i++) {
double dy = fp.y[i + 1] - fp.y[i];
double dx = fp.x[i + 1] - fp.x[i];
fp.threat.push_back(lat_qp.calc_point_thetar(dy, dx));
}
// 最后一个道路航向角和前一个相同
// fp.threat.push_back(fp.threat.back());
}
/**************************************************************************/
/**
* @brief 寻找匹配点及距离最短的点
* @return int
*/
int index_ = 0;
int findTrajref(double current_post_x, double current_post_y) {
int numPoints = fp.x.size();
// double dis_min = std::pow(fp.x[0] - current_post_x, 2) +
// std::pow(fp.y[0] - current_post_y, 2);
double dis_min = std::numeric_limits<double>::max();
int index = 0;
for (int i = index; i < numPoints; i++) {
double temp_dis = std::pow(fp.x[i] - current_post_x, 2) +
std::pow(fp.y[i] - current_post_y, 2);
// printf("dis_min,temp_dis=%f,%f \n", dis_min, temp_dis);
if (temp_dis < dis_min) {
dis_min = temp_dis;
index = i;
}
}
index_ = index;
// printf("index,numPoints=%d,%d \n", index, numPoints);
return index;
}
/**
* @brief 计算误差err和投影点的曲率
* 1.先遍历找到匹配点
* 2.通过匹配点近似求解投影点
* 2.1 由投影点得到对应的航向角和曲率
* @return std::array
*/
std::array<double, 5> cal_err_k(double current_post_x, double current_post_y,
std::array<double, 3> calRPY) {
std::array<double, 5> err_k;
int index = findTrajref(current_post_x, current_post_y);
// 找到index后,开始求解投影点
// Eigen::Vector2f tor;
Eigen::Matrix<double, 2, 1> tor;
tor << cos(fp.threat[index]), sin(fp.threat[index]);
// Eigen::Vector2f nor;
Eigen::Matrix<double, 2, 1> nor;
nor << -sin(fp.threat[index]), cos(fp.threat[index]);
// Eigen::Vector2f d_err;
Eigen::Matrix<double, 2, 1> d_err;
d_err << current_post_x - fp.x[index], current_post_y - fp.y[index];
double phi = calRPY[2];
// nor.transpose()对nor转置
double ed = nor.transpose() * d_err;
// double ed = -vx*sin();
double es = tor.transpose() * d_err;
// 投影点的threat角度
double projection_point_threat = fp.threat[index] + fp.k[index] * es;
// double phi = fp.threat[index];
double ed_d = vy * cos(phi - projection_point_threat) +
vx * sin(phi - projection_point_threat);
// 计算ephi
// double ephi = sin(phi - projection_point_threat);
double ephi = phi - projection_point_threat;
// 计算s_d
double s_d = (vx * cos(phi - projection_point_threat) -
vy * sin(phi - projection_point_threat)) /
(1 - fp.k[index] * ed);
double phi_d = vx * fp.k[index];
double ephi_d = phi_d - fp.k[index] * s_d;
// 计算投影点曲率k
double projection_point_curvature = fp.k[index];
err_k[0] = ed;
err_k[1] = ed_d;
err_k[2] = ephi;
err_k[3] = ephi_d;
err_k[4] = projection_point_curvature;
return err_k;
}
/**
* @brief 求解k系数
* 1.首先用迭代法解黎卡提方程得到参数得到p矩阵
* 2.将p带入k得到k值
* 2.将得到的k带入u(n)=-kx(n)得到u也就是转角的控制量
* @return Eigen::RowVector4cf
*/
Eigen::Matrix<double, 1, 4> cal_dlqr(Eigen::Matrix4d A,
Eigen::Matrix<double, 4, 1> B,
Eigen::Matrix4d Q,
Eigen::Matrix<double, 1, 1> R) {
// 设置最大循环迭代次数
int numLoop = 200;
// 设置目标极小值
double minValue = 10e-10;
Eigen::Matrix4d p_old;
p_old = Q;
/*************************************/
/**
* 离散化状态方程
*
*/
double ts = 0.001;
Eigen::Matrix4d eye;
eye.setIdentity(4, 4);
Eigen::Matrix4d Ad;
Ad = (eye - ts * 0.5 * A).inverse() * (eye + ts * 0.5 * A);
Eigen::Matrix<double, 4, 1> Bd;
Bd = B * ts;
/*************************************/
for (int i = 0; i < numLoop; i++) {
// B.inverse()求逆
Eigen::Matrix4d p_new = Ad.transpose() * p_old * Ad -
Ad.transpose() * p_old * Bd *
(R + Bd.transpose() * p_old * Bd).inverse() *
Bd.transpose() * p_old * Ad +
Q;
// p.determinant()求行列式
// if (std::abs((p_old - p_new).determinant()) <= minValue) {
// cwiseAbs()求绝对值、maxCoeff()求最大系数
if (fabs((p_new - p_old).maxCoeff()) < minValue) {
p_old = p_new;
break;
}
p_old = p_new;
}
Eigen::Matrix<double, 1, 4> k;
// Eigen::RowVector4f;
// 当两个超出范围的浮点数(即INF)进行运算时,运算结果会成为NaN。
k = (R + Bd.transpose() * p_old * Bd).inverse() * Bd.transpose() * p_old * Ad;
return k;
}
/**
* @brief 计算k值
*
* @param err_k
* @return Eigen::Matrix
*/
Eigen::Matrix<double, 1, 4> cal_k(std::array<double, 5> err_k) {
Eigen::Matrix4d A;
A << 0, 1, 0, 0, 0, (cf + cr) / (m * vx), -(cf + cr) / m,
(a * cf - b * cr) / (m * vx), 0, 0, 0, 1, 0,
(a * cf - b * cr) / (Iz * vx), -(a * cf - b * cr) / Iz,
(a * a * cf + b * b * cr) / (Iz * vx);
// Eigen::Vector4f B;
Eigen::Matrix<double, 4, 1> B;
B << 0, -cf / m, 0, -a * cf / Iz;
// Eigen::Matrix4f Q;
// // 设置成单位矩阵
Eigen::Matrix4d Q;
// Q.setIdentity(4, 4);
Q(0, 0) = 60;
Q(1, 1) = 1;
Q(2, 2) = 1;
Q(3, 3) = 1;
Eigen::Matrix<double, 1, 1> R;
R(0, 0) = 35.0;
// MatrixXd矩阵只能用(),VectorXd不仅能用()还能用[]
Eigen::Matrix<double, 1, 4> k = cal_dlqr(A, B, Q, R);
return k;
}
/**
* @brief 计算前馈环节
* @return double
*/
double cal_forword_angle(Eigen::Matrix<double, 1, 4> k,
std::array<double, 5> err_k) {
double k3 = k[2];
// 不足转向系数
double kv = b * m / (cf * wheel_base) - a * m / (cr * wheel_base);
//投影点的曲率final_path.k[index]
double point_curvature = err_k[4];
double forword_angle =
wheel_base * point_curvature + kv * vx * vx * point_curvature -
k3 * (b * point_curvature - a * m * vx * vx * point_curvature / cr / b);
return forword_angle;
}
/**
* @brief 计算前轮转角u
*/
double cal_angle(Eigen::Matrix<double, 1, 4> k, double forword_angle,
std::array<double, 5> err_k) {
Eigen::Matrix<double, 4, 1> err;
err << err_k[0], err_k[1], err_k[2], err_k[3];
double angle = -k * err + forword_angle;
return angle;
}
/**
* @brief 限制前轮最大转角
*/
double limitSterringAngle(double value, double bound1, double bound2) {
if (bound1 > bound2) {
std::swap(bound1, bound2);
}
if (value < bound1) {
return bound1;
} else if (value > bound2) {
return bound2;
}
return value;
}
/**
* @brief 统一调用各个子函数
* @return double
*/
double theta_angle(double currentPositionX, double currentPositionY,
std::array<double, 3> cal_RPY) {
std::array<double, 5> err_k =
cal_err_k(currentPositionX, currentPositionY, cal_RPY);
Eigen::Matrix<double, 1, 4> k = cal_k(err_k);
double forword_angle = cal_forword_angle(k, err_k);
double tempangle = cal_angle(k, forword_angle, err_k);
double angle =
limitSterringAngle(tempangle, -wheel_max_degree, wheel_max_degree);
printf("angle,forword_angle=%.3f,%.3f\n", angle, forword_angle);
return angle;
}
void velocityCall(const geometry_msgs::TwistStamped &carWaypoint) {
//错误写法 carVelocity = carWaypoint.linear.x;
vx = carWaypoint.twist.linear.x;
}
void poseCallback(const geometry_msgs::PoseStamped ¤tWaypoint) {
double currentPositionX = currentWaypoint.pose.position.x;
double currentPositionY = currentWaypoint.pose.position.y;
double currentPositionZ = 0.0;
double currentQuaternionX = currentWaypoint.pose.orientation.x;
double currentQuaternionY = currentWaypoint.pose.orientation.y;
double currentQuaternionZ = currentWaypoint.pose.orientation.z;
double currentQuaternionW = currentWaypoint.pose.orientation.w;
std::array<double, 3> cal_RPY =
calQuaternionToEuler(currentQuaternionX, currentQuaternionY,
currentQuaternionZ, currentQuaternionW);
double theta = theta_angle(currentPositionX, currentPositionY, cal_RPY);
int numpoints = fp.x.size();
if (index_ < numpoints - 2) {
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 8;
vel_msg.angular.z = theta;
frenet_lqr_.publish(vel_msg);
geometry_msgs::PoseStamped this_pose_stamped;
this_pose_stamped.pose.position.x = currentPositionX;
this_pose_stamped.pose.position.y = currentPositionY;
geometry_msgs::Quaternion goal_quat = tf::createQuaternionMsgFromYaw(theta);
this_pose_stamped.pose.orientation.x = currentQuaternionX;
this_pose_stamped.pose.orientation.y = currentQuaternionY;
this_pose_stamped.pose.orientation.z = currentQuaternionZ;
this_pose_stamped.pose.orientation.w = currentQuaternionW;
this_pose_stamped.header.stamp = ros::Time::now();
this_pose_stamped.header.frame_id = "world";
trajectorypath.poses.push_back(this_pose_stamped);
trajectory_path.publish(trajectorypath);
} else {
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 0;
vel_msg.angular.z = 0;
frenet_lqr_.publish(vel_msg);
}
}
int main(int argc, char **argv) {
//创建节点
ros::init(argc, argv, "lqr");
//创建节点句柄
ros::NodeHandle a;
//创建Publisher,发送经过lqr计算后的转角及速度
frenet_lqr_ = a.advertise<geometry_msgs::Twist>("/smart/cmd_vel", 20);
//初始化五次多项式轨迹
calc_frenet_paths();
int Num = fp.x.size();
for (int i = 0; i < Num; i++) {
printf("x,y,th,k,i=%.3f,%.3f,%.3f,%f,%d \n", fp.x[i], fp.y[i],
fp.threat[i],
fp.k[i], i);
}
/**************************************************************/
// 发布规划轨迹
path_pub_ = a.advertise<nav_msgs::Path>("rviz_path", 20, true);
path.header.frame_id = "world";
path.header.stamp = ros::Time::now();
geometry_msgs::PoseStamped pose;
pose.header.stamp = ros::Time::now();
pose.header.frame_id = "world";
int sNum = fp.x.size();
for (int i = 0; i < sNum; i++) {
pose.pose.position.x = fp.x[i];
pose.pose.position.y = fp.y[i];
path.poses.push_back(pose);
}
path_pub_.publish(path);
/**************************************************************/
//发布小车运动轨迹
trajectory_path = a.advertise<nav_msgs::Path>("trajector_ypath", 20, true);
trajectorypath.header.frame_id = "world";
trajectorypath.header.stamp = ros::Time::now();
/**************************************************************/
ros::Subscriber carVel = a.subscribe("/smart/velocity", 20, velocityCall);
ros::Subscriber carPose = a.subscribe("/smart/rear_pose", 20, poseCallback);
ros::spin();
return 0;
};
操作步骤:(新开终端窗口)
source devel/setup.sh
roslaunch car_model spawn_car.launch
roslaunch lqr_steering frenet_lqr.launch
rviz 中add /trajector_ypath /rviz_path /smart (在rviz显示中,红色为小车运动轨迹,绿色为规划模块给出的轨迹)
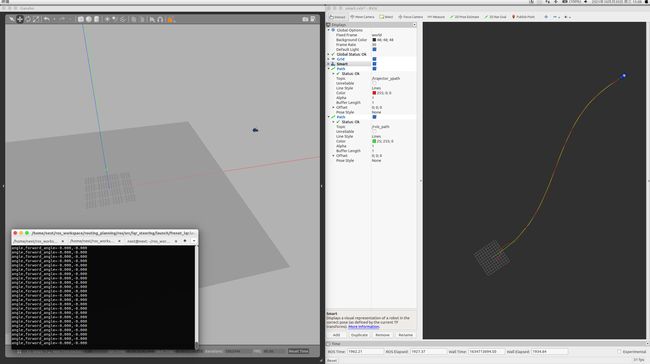
LQR仿真结果: