AI算法工程师 | 04人工智能基础-高等数学知识强化(四)线性代数基础之矩阵
文章目录
- 数学知识 之 线性代数基础
-
- 矩阵及其运算
-
- 特殊的矩阵
-
- ღ 方阵
- ღ 对称矩阵
- ღ 单位矩阵
- ღ 对角矩阵
- 矩阵的运算
-
- ღ 加减法、数乘、转置、乘法
- ღ 代码表示矩阵的运算
- ღ 矩阵运算法则
- 逆矩阵
-
- ღ 逆矩阵的定义及其作用
- ღ 逆矩阵在 numpy 中的求解
- 行列式
-
- ღ 行列式的计算及其性质
- ღ 行列式在 numpy 中的使用
数学知识 之 线性代数基础
矩阵及其运算
矩阵就是二维数组,下面是一个 m 乘 n 的矩阵
- 该矩阵有 m 行 n 列,每行每列上面都有一个元素
- 每个元素都有行标 i i i 和列标 j j j,第 i i i 行 第 j j j 列的元素可表示为: a i j a_{ij} aij
[ a 11 ⋯ a 1 n ⋮ ⋱ ⋮ a m 1 ⋯ a m n ] \begin{bmatrix} a_{11} & \cdots & a_{1n}\\ \vdots & \ddots &\vdots \\ a_{m1} & \cdots & a_{mn} \end{bmatrix} ⎣⎢⎡a11⋮am1⋯⋱⋯a1n⋮amn⎦⎥⎤
特殊的矩阵
ღ 方阵
方阵:如果 m 等于 n,那就称为方阵(行数与列数一致)
[ 1 0 0 4 0 2 1 3 0 ] \begin{bmatrix} 1 & 0 & 0\\ 4 & 0 & 2\\ 1 & 3 & 0 \end{bmatrix} ⎣⎡141003020⎦⎤
ღ 对称矩阵
对称矩阵:如果 a i j a_{ij} aij 等于 a j i a_{ji} aji,则为对称矩阵(沿着主对角线对称)
[ 1 1 2 1 4 3 2 3 0 ] \begin{bmatrix} 1 & 1 & 2\\ 1 & 4 & 3\\ 2 & 3 & 0 \end{bmatrix} ⎣⎡112143230⎦⎤
ღ 单位矩阵
单位矩阵:主对角线全为1,其余为0。单位矩阵通常用 I I I 或 E E E 来表示,等同于数字里面的 1
[ 1 0 0 0 1 0 0 0 1 ] \begin{bmatrix} 1 & 0 & 0\\ 0 & 1 & 0\\ 0 & 0 & 1 \end{bmatrix} ⎣⎡100010001⎦⎤
Pyhton中的表示
以下是 cmd 命令端中输入python,所进入的 python 交互窗口
- 创建单位矩阵
>>> import numpy as np
>>> np.identity(5) # 创建单位矩阵( 5 行 5 列的方阵)
array([[1., 0., 0., 0., 0.],
[0., 1., 0., 0., 0.],
[0., 0., 1., 0., 0.],
[0., 0., 0., 1., 0.],
[0., 0., 0., 0., 1.]])
>>> np.identity(3) # 创建单位矩阵( 3 行 3 列的方阵)
array([[1., 0., 0.],
[0., 1., 0.],
[0., 0., 1.]])
>>> np.eye(5) # 通过 eye 函数 也可创建单位矩阵
array([[1., 0., 0., 0., 0.],
[0., 1., 0., 0., 0.],
[0., 0., 1., 0., 0.],
[0., 0., 0., 1., 0.],
[0., 0., 0., 0., 1.]])
- 一个矩阵 A A A 与单位矩阵 I I I 做内积,得到的结果与原矩阵 A A A 相同
>>> np.arange(9) # 创建一组数组
array([0, 1, 2, 3, 4, 5, 6, 7, 8])
>>> A = np.arange(9).reshape(3,3) # 变成 3 行 3 列(二维数组,即:矩阵)
>>> A
array([[0, 1, 2],
[3, 4, 5],
[6, 7, 8]])
>>> I = np.identity(3) # 创建单位矩阵( 3 行 3 列的方阵)
>>> I
array([[1., 0., 0.],
[0., 1., 0.],
[0., 0., 1.]])
>>> A * I # ✘ 代码中这样写,得到的结果有问题-它在进行对应点相乘,而非内积(得到的不是矩阵的乘法)
array([[0., 0., 0.],
[0., 4., 0.],
[0., 0., 8.]])
>>> np.dot(A,I) # √ 正确的矩阵的乘法表达(dot表示矩阵乘法,A 与 I 做内积)
array([[0., 1., 2.],
[3., 4., 5.],
[6., 7., 8.]])
ღ 对角矩阵
对角矩阵:主对角线非 0,其它位置是 0(单位矩阵是一种特殊的对角矩阵)
[ λ 1 ⋯ 0 0 0 ⋯ λ 2 ⋯ 0 0 0 ⋯ ⋯ ⋯ 0 0 0 ⋯ ⋯ ⋯ 0 0 0 ⋯ λ n ] \begin{bmatrix} \lambda_1 & \cdots& 0& 0 & 0\\ \cdots&\lambda_2 & \cdots& 0 & 0\\ 0 & \cdots& \cdots& \cdots & 0\\ 0 & 0 &\cdots& \cdots&\cdots\\ 0 & 0& 0& \cdots & \lambda_n\\ \end{bmatrix} ⎣⎢⎢⎢⎢⎡λ1⋯000⋯λ2⋯000⋯⋯⋯000⋯⋯⋯000⋯λn⎦⎥⎥⎥⎥⎤
小贴士
- 对称矩阵、单位矩阵、对角矩阵等都一定是方阵
- 主对角线:方阵中,从左上角到右下角这一斜线方向上的对角线
矩阵的运算
ღ 加减法、数乘、转置、乘法
加减法:矩阵的加法就是矩阵的对应位置相加,减法也是一样就是对应位置相减
[ 1 2 3 0 0 0 ] + [ 4 5 6 0 0 0 ] = [ 5 7 9 0 0 0 ] \begin{bmatrix} 1 & 2 & 3\\ 0 & 0 & 0 \end{bmatrix} + \begin{bmatrix} 4 & 5 & 6\\ 0 & 0 & 0 \end{bmatrix} = \begin{bmatrix} 5 & 7 & 9\\ 0 & 0 & 0 \end{bmatrix} [102030]+[405060]=[507090]
数乘:对应位置的一个相乘
5 × [ 1 2 3 0 0 0 ] = [ 5 10 15 0 0 0 ] 5 \times \begin{bmatrix} 1 & 2 & 3\\ 0 & 0 & 0 \end{bmatrix} = \begin{bmatrix} 5 & 10 & 15\\ 0 & 0 & 0 \end{bmatrix} 5×[102030]=[50100150]
转置:转置的操作和向量是一样的,就是把 a i j a_{ij} aij 变成 a j i a_{ji} aji,把行和列互换一下( a i j ⇒ a j i a_{ij}\Rightarrow a_{ji} aij⇒aji)
[ 1 2 3 4 5 6 ] T = [ 1 4 2 5 3 6 ] \begin{bmatrix} 1 & 2 & 3\\ 4 & 5 & 6 \end{bmatrix}^T = \begin{bmatrix} 1 & 4\\ 2 & 5 \\ 3 & 6 \\ \end{bmatrix} [142536]T=⎣⎡123456⎦⎤
乘法:矩阵的乘法和一般的乘法不太一样
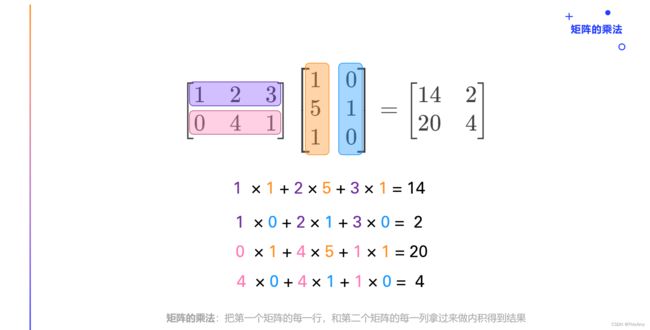
- 它是把第一个矩阵的每一行,和第二个矩阵的每一列拿过来做内积得到结果
- 注意:左边矩阵的列数要与右边矩阵的行数相同,否则无法相乘
- 如:m 行 n 列的矩阵 与 n 行 k 列的矩阵相乘,可得到 m 行 k 列的矩阵(m x n 与 n x k => n x k )
[ 1 2 3 0 4 1 ] [ 1 0 5 1 1 0 ] = [ 14 2 20 4 ] \begin{bmatrix} 1 & 2 & 3\\ 0 & 4 & 1 \end{bmatrix} \begin{bmatrix} 1 & 0\\ 5 & 1 \\ 1 & 0 \\ \end{bmatrix}=\begin{bmatrix} 14& 2\\ 20 & 4 \\ \end{bmatrix} [102431]⎣⎡151010⎦⎤=[142024]
ღ 代码表示矩阵的运算
Pyhton中的表示
以下是 cmd 命令端中输入python,所进入的 python 交互窗口
- 矩阵的加减法
>>> import numpy as np
>>> np.arange(6) # 创建一维数组
array([0, 1, 2, 3, 4, 5])
>>> a = np.arange(6).reshape(2,3) # 变成 2 行 3 列的
>>> a
array([[0, 1, 2],
[3, 4, 5]])
>>> b = np.arange(6).reshape(2,3)
>>> b
array([[0, 1, 2],
[3, 4, 5]])
>>> a + b # 矩阵的加法(对应位置相加)
array([[ 0, 2, 4],
[ 6, 8, 10]])
>>> a - b # 矩阵的减法(对应位置相减)
array([[0, 0, 0],
[0, 0, 0]])
- 数乘
>>> 5 * a
array([[ 0, 5, 10],
[15, 20, 25]])
- 转置
>>> # 回忆:向量的转置
>>> v = np.array([1,2,3])
>>> v.T # 该方法,虽然转置了,但展现的还是行向量形式
array([1, 2, 3])
>>> v.reshape(-1,1) # 若要展示成列向量的形式,可通过 reshape 形状变换
array([[1],
[2],
[3]])
>>>
>>>
>>> # 矩阵的转置
>>> a
array([[0, 1, 2],
[3, 4, 5]])
>>> a.T # 方式一:在矩阵中,该方法可实现转置
array([[0, 3],
[1, 4],
[2, 5]])
>>> a.reshape(3,2) # ✘ 通过改变形状 无法实现 矩阵的转置
array([[0, 1],
[2, 3],
[4, 5]])
>>>
>>> # 方式二:通过 transpose()函数实现转置
>>> a.shape # 打印 a 的形状( 2 行 3 列)
(2, 3)
>>> a.transpose(1,0) # 1,0 代表索引号 index,分别指代 a 的形状(2,3)中的 3 和 2 => 把它们颠倒位置,得到 (3,2)=> 3 行 2 列
array([[0, 3],
[1, 4],
[2, 5]])
>>> a.T.shape # 该方式得到的是 3 行 2 列矩阵
(3, 2)
>>> a.transpose(1,0).shape # 该方式得到的也是 3 行 2 列矩阵(说明 transpose 方式可实现矩阵的转置)
(3, 2)
>>>
>>>
>>> # 扩展:transpose()函数 可适用于更高维度的数组,如 三维
>>> temp = np.arange(24).reshape(2,3,4) # 三维数组:2 个大块,每大块 为 3 行,4 列
>>> temp
array([[[ 0, 1, 2, 3],
[ 4, 5, 6, 7],
[ 8, 9, 10, 11]],
[[12, 13, 14, 15],
[16, 17, 18, 19],
[20, 21, 22, 23]]])
>>> temp.transpose(1,0,2) # transpose()函数的作用:调换数组的索引值 ∴ 由 (2,3,4) =》 变为 (3,2,4) 3个 2行 4列的多维数组
array([[[ 0, 1, 2, 3],
[12, 13, 14, 15]],
[[ 4, 5, 6, 7],
[16, 17, 18, 19]],
[[ 8, 9, 10, 11],
[20, 21, 22, 23]]])
- 矩阵的乘法
>>> a # 接着前面所赋给的值
array([[0, 1, 2],
[3, 4, 5]])
>>> b
array([[0, 1, 2],
[3, 4, 5]])
>>> a * b # ✘ 这不是矩阵相乘,而是对应位置相乘
array([[ 0, 1, 4],
[ 9, 16, 25]])
>>>
>>> # 通过 dot 实现矩阵的相乘
>>> np.dot(a,b) # 注意:两个相同形状的矩阵( 2 行 3 列 ),无法进行相乘
Traceback (most recent call last):
File "" , line 1, in <module>
File "<__array_function__ internals>", line 180, in dot
ValueError: shapes (2,3) and (2,3) not aligned: 3 (dim 1) != 2 (dim 0)
>>>
>>> # 两矩阵如何才可相乘 ?
>>> b.T # 对 b 进行转置
array([[0, 3],
[1, 4],
[2, 5]])
>>> np.dot(a,b.T) # 2 行 3 列 乘以 3 行 2 列 =》 得到 2 行 2 列的矩阵
array([[ 5, 14],
[14, 50]])
>>> np.dot(b.T,a) # 3 行 2 列 乘以 2 行 3 列 =》 得到 3 行 3 列的矩阵
array([[ 9, 12, 15],
[12, 17, 22],
[15, 22, 29]])
ღ 矩阵运算法则
矩阵的加减法
- 满足分配律,结合律,和交换律
- 如:结合律 A + B + C = A + ( B + C ) A+B+C=A+(B+C) A+B+C=A+(B+C)
矩阵的乘法
- 满足结合律: ( A B ) C = A ( B C ) (AB)C=A(BC) (AB)C=A(BC)
- 满足分配律
- 左分配律: ( A + B ) C = A C + B C (A+B)C=AC+BC (A+B)C=AC+BC
- 右分配律: A ( B + C ) = A B + A C A(B+C)=AB+AC A(B+C)=AB+AC
- 不满足交换律: A B ≠ B A AB≠BA AB=BA
- 说明: A B AB AB 与 B A BA BA 不一定相等,甚至它们的尺寸也不同
- 举例:
A B = [ 1 2 3 0 0 0 ] [ 1 0 1 0 1 0 ] = [ 6 0 0 0 ] AB=\begin{bmatrix} 1 & 2 & 3\\ 0 & 0 & 0 \end{bmatrix} \begin{bmatrix} 1 & 0\\ 1 & 0 \\ 1 & 0 \\ \end{bmatrix}=\begin{bmatrix} 6 & 0\\ 0 & 0 \\ \end{bmatrix} AB=[102030]⎣⎡111000⎦⎤=[6000]
B A = [ 1 0 1 0 1 0 ] [ 1 2 3 0 0 0 ] = [ 1 2 3 1 2 3 1 2 3 ] BA=\begin{bmatrix} 1 & 0\\ 1 & 0 \\ 1 & 0 \\ \end{bmatrix}\begin{bmatrix} 1 & 2 & 3\\ 0 & 0 & 0 \end{bmatrix} =\begin{bmatrix} 1 & 2& 3\\ 1 & 2& 3\\ 1 & 2& 3\\ \end{bmatrix} BA=⎣⎡111000⎦⎤[102030]=⎣⎡111222333⎦⎤
转置
- 公式: ( A B ) T = B T A T (AB)^T=B^TA^T (AB)T=BTAT
>>> # 通过代码验证 转置 的公式
>>> A = np.arange(6).reshape(2,3) # 创建 2 行 3 列的矩阵
>>> A
array([[0, 1, 2],
[3, 4, 5]])
>>> B = np.arange(10,16).reshape(3,2) # 创建 3 行 2 列的矩阵
>>> B
array([[10, 11],
[12, 13],
[14, 15]])
>>> np.dot(A,B)
array([[ 40, 43],
[148, 160]])
>>> np.dot(A,B).T # AB相乘再转置
array([[ 40, 148],
[ 43, 160]])
>>> np.dot(A.T,B.T)
array([[ 33, 39, 45],
[ 54, 64, 74],
[ 75, 89, 103]])
>>> np.dot(B.T,A.T) # B的转置 乘 A的转置(结果等于 AB相乘再转置)
array([[ 40, 148],
[ 43, 160]])
逆矩阵
矩阵有 A B AB AB,但是没有 A / B A/B A/B 这么一说,只有逆矩阵
ღ 逆矩阵的定义及其作用
逆矩阵的定义
假设有个矩阵 A A A(一定是方阵),乘以矩阵 B B B 等于 I I I( I I I 为单位矩阵), A B = I AB=I AB=I 或者 B A = I BA=I BA=I,则称 B B B 为 A A A 的右逆矩阵、左逆矩阵。
一个结论:如果这样的 B B B 存在,它的左逆和右逆一定相等,统称为 A A A 的 − 1 -1 −1 ( A A A 的逆矩阵)
矩阵求逆的作用
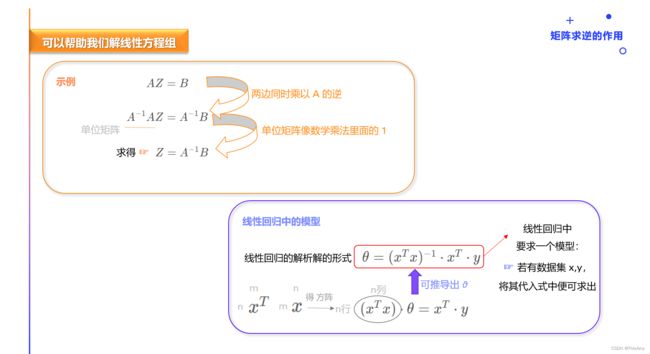
公式
( A B ) − 1 = B − 1 A − 1 (AB)^{-1}=B^{-1}A^{-1} (AB)−1=B−1A−1
( A − 1 ) − 1 = A (A^{-1})^{-1}=A (A−1)−1=A
( A T ) − 1 = ( A − 1 ) T (A^{T})^{-1}=(A^{-1})^{T} (AT)−1=(A−1)T
ღ 逆矩阵在 numpy 中的求解
Pyhton中的表示
以下是 cmd 命令端中输入python,所进入的 python 交互窗口
- 验证公式 ( A − 1 ) − 1 = A (A^{-1})^{-1}=A (A−1)−1=A
>>> import numpy as np
>>> A = np.array([20,245,54,12]).reshape(2,2) # 创建 2 行 2 列的矩阵(方阵)
>>> A # A
array([[ 20, 245],
[ 54, 12]])
>>> A_inv = np.linalg.inv(A) # 矩阵求逆
>>> A_inv
array([[-0.00092379, 0.01886066],
[ 0.00415704, -0.00153965]])
>>>
>>> np.linalg.inv(A_inv) # A 逆 的 逆 = A
array([[ 20., 245.],
[ 54., 12.]])
- 验证公式 ( A T ) − 1 = ( A − 1 ) T (A^{T})^{-1}=(A^{-1})^{T} (AT)−1=(A−1)T
>>> np.linalg.inv(A.T) # A 转置 的逆
array([[-0.00092379, 0.00415704],
[ 0.01886066, -0.00153965]])
>>> np.linalg.inv(A).T # A 逆 的转置
array([[-0.00092379, 0.00415704],
[ 0.01886066, -0.00153965]])
小贴士
- numpy.linalg 模块包含线性代数的函数
- np.linalg.inv():矩阵求逆 ( linalg = linear + algebra )
-_-
—— 参考:numpy基础教程之np.linalg
行列式
行列式其实在机器学习中用的并不多,一个矩阵必须是方阵,才能计算它的行列式(行列式是把矩阵变成一个标量)
ღ 行列式的计算及其性质
计算方式
∣ a 11 a 12 a 21 a 22 ∣ = a 11 a 22 − a 12 a 21 \begin{vmatrix} a_{11} &a_{12} \\ a_{21}& a_{22} \end{vmatrix}=a_{11}a_{22}-a_{12}a_{21} ∣∣∣∣a11a21a12a22∣∣∣∣=a11a22−a12a21
∣ a 11 a 12 a 13 a 21 a 22 a 23 a 31 a 32 a 33 ∣ = a 11 a 22 a 33 + a 12 a 23 a 31 + a 13 a 21 a 32 − a 13 a 22 a 31 − a 12 a 21 a 33 − a 11 a 23 a 32 \begin{vmatrix} a_{11} &a_{12} &a_{13}\\ a_{21}& a_{22}&a_{23}\\ a_{31}& a_{32}&a_{33} \end{vmatrix}=a_{11}a_{22}a_{33}+a_{12}a_{23}a_{31}+a_{13}a_{21}a_{32}-a_{13}a_{22}a_{31}-a_{12}a_{21}a_{33}-a_{11}a_{23}a_{32} ∣∣∣∣∣∣a11a21a31a12a22a32a13a23a33∣∣∣∣∣∣=a11a22a33+a12a23a31+a13a21a32−a13a22a31−a12a21a33−a11a23a32
行列式的应用
如:① 正态分布中 Σ Σ Σ 的行列式并开根号, ∣ Σ ∣ 1 2 \left |Σ \right |^{\tfrac{1}{2}} ∣Σ∣21;② 特征值、特征向量中也会应用到
行列式的性质
∣ A B ∣ = ∣ B A ∣ \left | AB \right |=\left | BA \right | ∣AB∣=∣BA∣
∣ A − 1 ∣ = ∣ A ∣ − 1 \left | A^{-1} \right |=\left | A \right |^{-1} ∣∣A−1∣∣=∣A∣−1
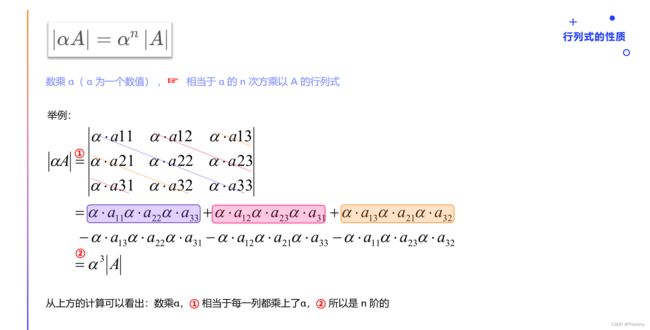
∣ α A ∣ = α n ∣ A ∣ \left | \alpha A \right |=\alpha ^n\left | A \right | ∣αA∣=αn∣A∣
小贴士
以上行列式的内容,都是针对方阵而言的
ღ 行列式在 numpy 中的使用
Pyhton中的表示
以下是 cmd 命令端中输入python,所进入的 python 交互窗口
- 验证公式 ∣ A − 1 ∣ = ∣ A ∣ − 1 \left | A^{-1} \right |=\left | A \right |^{-1} ∣∣A−1∣∣=∣A∣−1
>>> import numpy as np
>>> A = np.arange(4).reshape(2,2) # 创建 2 行 2 列 的方阵
>>> A
array([[0, 1],
[2, 3]])
>>>
>>> # 通过 np.linalg.det 可求行列式
>>> np.linalg.det(np.linalg.inv(A)) # A 逆 的 行列式
-0.49999999999999994
>>> 1 / np.linalg.det(A) # A 行列式 的 逆
-0.5
- 验证公式 ∣ α A ∣ = α n ∣ A ∣ \left | \alpha A \right |=\alpha ^n\left | A \right | ∣αA∣=αn∣A∣
>>> A
array([[0, 1],
[2, 3]])
>>> 3*A
array([[0, 3],
[6, 9]])
>>> np.linalg.det(3*A) # 3 乘 A,的行列式
-17.999999999999996
>>>
>>> 3**2 * np.linalg.det(A) # 3²,乘 A的行列式
-18.0
—— 说明:本文代码基于 python3.0