最短路问题(超详细~~)
文章目录
- 最短路问题分类
- 单源最短路
-
- 朴素Dijkstra算法
- 堆优化版Dijkstra
- Bellman-Ford算法
- SPFA算法
-
- **SPFA算法判断负环**
- 多源汇最短路
-
- Floyd算法
最短路问题分类
最短路算法知识结构图
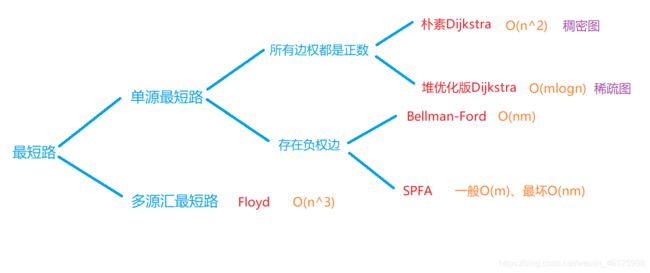
注:n为顶点数,m为边数
每种不同的情况都有相应最适合的算法,但不用拘泥于一定要用某个算法。
单源最短路:求一个点到其他所有点的最短距离
多源汇最短路:源 指 起点,汇 指 终点。任意两点间的最短距离(起点、终点不确定)
稠密图:m至少和n^2大致是一个级别 (稠密图用邻接矩阵存储)
稀疏图:m至少和n大致是一个级别 (稀疏图用邻接表存储)
重点:建图,如何把原问题抽象成一个最短路问题,如何定义点和边。
单源最短路
朴素Dijkstra算法
实现步骤:
1.初始化距离 dist[1] = 0,dist[i] = + ∞ (dist数组表示起点到i点的距离)
2.for循环 1~n循环n次 (s:当前已确定最短距离的点)
①找到不在s中的距离起点最近的点,赋给t O(n^2)
②把t加到s中去 O(n)
③用t来更新其他所有点的距离 O(m)(看从1号点<起点>到x的距离是否大于到t的距离,即dist[x] > dist[t] 如果是,则用t来更新)
找到没有确定最短路且距离起点最近的点,并通过这个点更新其他点到起点的最短距离(即以这个点为过渡点)
每次循环都可以确定一个点的最短距离,循环n次就可以确定每个点到起点的最短距离了。
模板
int g[N][N]; // 存储每条边
int dist[N]; // 存储1号点到每个点的最短距离
bool st[N]; // 存储每个点的最短路是否已经确定
// 求1号点到n号点的最短路,如果不存在则返回-1
int dijkstra()
{
memset(dist, 0x3f, sizeof dist);
dist[1] = 0;
for (int i = 0; i < n - 1; i ++ )
{
int t = -1; // 在还未确定最短路的点中,寻找距离最小的点
for (int j = 1; j <= n; j ++ )
if (!st[j] && (t == -1 || dist[t] > dist[j]))
t = j;
// 用t更新其他点的距离
for (int j = 1; j <= n; j ++ )
dist[j] = min(dist[j], dist[t] + g[t][j]);
st[t] = true;
}
if (dist[n] == 0x3f3f3f3f) return -1;
return dist[n];
}
典例——AcWing 849.Dijkstra求最短路I

#include 堆优化版Dijkstra
实现步骤:
1.初始化距离 dist[1] = 0,dist[i] = + ∞ (dist数组表示起点到i点的距离)
2.for循环 1~n循环n次 (s:当前已确定最短距离的点)
①找到不在s中的距离起点最近的点,赋给t <优化:用小根堆来找> O(1)
②把t加到s中去 O(n)
③用t来更新其他所有点的距离 O(mlogn) <利用堆更新每个点的时间复杂度为O(logn)>
整个算法的时间复杂度就可以优化成 O(mlogn)

m≤n^2 mlogm≤2mlogn 所以两种写法的时间复杂度是一个级别的, 所以堆优化版的Dijkstra一般是不需要手写堆的。
典例——AcWing 850.Dijkstra求最短路II

#include Bellman-Ford算法
思路:循环n次,每次循环都遍历所有边,每次都更新一个结点的最短距离,那么循环n次,就可以确定n个点的最短路。
注:存在最短路时,一般不存在负权回路,即使存在,这个负环也不能在这条路径上(若存在负权回路,那么每在这个回路上转一圈,距离都会减小,这样可以无限次停留在负权回路,导致距离变为 - ∞)
实现步骤:
1.初始化: dist[1] = 0,dist[i] = + ∞
2.for循环n次:
for循环m次:遍历所有边
dist[b] = dist[a] + w; (松弛条件)
时间复杂度O(nm)
循环n此后所有的边都满足 dist[b] ≤dist[a] + w (三角不等式)
迭代k次的含义:从1号点经过不超过k条边走到每个点的最短距离
找负环的方法:若果第n次迭代时,又更新了路径,说明存在长度≥n的最短路径。如果一个路径有n条边,那么就意味着有n+1个点,而图中一共只有n个点,由抽屉原理,就一定有两个点编号相同,那么这条路径上就一定存在环,而且是在更新过之后,所以这个环就一定是负环。所以这个算法可以用来找负环,方法就是看第n次是否有更新。(了解即可,一般找负环不用Bellman-Ford,而用SPFA)
典例——AcWing 853.有边数限制的最短路

#include 思路解析:
这道题是Bellman-Ford算法的一个典型应用,而且此题只能用Bellman-Ford来做。
这道题的特殊性在于:要求的是从1号点到n号点最多经过k条边的最短距离,这里对边数做了限制,我们只需要迭代k此就可以了。
注1 memcpy(backup,dist,sizeof(dist)); 这里我们用backup数组来存储上一次迭代dist的值,防止发生串联,影响结果。

注2 if(dist[n] > 0x3f3f3f3f / 2) return -1; 这里判断最短路不存在的条件为什么不能写成 if(dist[n] == 0x3f3f3f3f )呢?
如果有负权边存在,我们在更新最短路的时候,可能会减掉一个数,∞减掉一个数,可能变成一个很大的而非∞的数,这时我们也认为,最短路是不存在的。
SPFA算法
SPFA适用于没有负环的图,但是绝大多数题目都是不存在负环的。SPFA算法是对上述Bellman-Ford算法的优化。Bellman-Ford是开两个循环,遍历每个点,每条边,这其中有很多重复的工作,SPFA对其进行了优化。
Bellman-Ford中dist[b] ≤dist[a] + w,dist[a]不一定是之前更新过的点,然而事实上,只有== 用之前被更新过的点去更新其他点,才会得到最短路 ==(只有一条路径上前面的点变小了,经过这个点的路径才会变小)。SPFA正是在这一点上进行了优化。
实现步骤:(用BFS来优化,队列中存储待更新的点)
- 1号点入队
- while(queue不空)
①取队头并入队(t = q.front() )
q.pop();
②更新t的所有出边 t → b
更新成功后,如果b不在队中,则入队。(b→queue)
SPFA算法实现的过程和Dijkstra算法实现过程非常相似。
典例——AcWing 851. spfa求最短路

#include SPFA算法判断负环
思路与上面所说的Bellman-Ford算法判断负环是相同的,这里我们另开一个cnt数组来存当前最短路的边数。每次更新边的同时,更新cnt,当== cnt ≥ n ==时,就说明存在负环。(多出来的边一定是负环,不然不会被更新到最短路中)
典例——AcWing 852.spfa判断负环

#include 多源汇最短路
Floyd算法
原理:基于动态规划,状态表示(三维):d[k,i,j]:从点 i 只经过1~k这些中间点到达点 j 的最短距离。
那么就有:d[k,i,j] = d[k-1,i,k] + d[k-1,k,j] (状态更新)
思路:我们可以把点i到j的方式归为两类
- 从i 直接到 j;
- 从i 经过 若干个点 到 j;
模板:三重循环,d(i,j)表示从i到j的最短路的长度
//初始化:
for (int i = 1; i <= n; i ++ )
for (int j = 1; j <= n; j ++ )
if (i == j) d[i][j] = 0; //Floyd算法要求不能存在负环
else d[i][j] = INF;
//算法实现
void floyd()
{
for (int k = 1; k <= n; k ++ )
for (int i = 1; i <= n; i ++ )
for (int j = 1; j <= n; j ++ )
d[i][j] = min(d[i][j], d[i][k] + d[k][j]);
}
典例——AcWing 854.Floyd 求最短路

#include 以上内容就是我总结的最短路问题的学习笔记。欢迎大佬们批评指正。