Cell Decomposition系列路径规划算法——PCD
Cell Decomposition系列路径规划算法——PCD
- 思想
- 1、表示
- 2、算法步骤
- 3、算法细节
-
- 3.1 cell形状
- 3.2 图搜索
- 3.3 局部路径规划LPP
- 3.4 cell分解
- 3.5 概率采样
- 3.6 算法结果
- 4、改进
-
- 4.1 概率采样
- 4.2 图搜索策略
-
- 4.2.1 restart 还是 lazy
- 4.2.2 optimal 还是 faster
- 5、PCD的问题
- 引用
做个正直的人
思想
PCD是目前Cell Decomposition算法中,我认为表现最好的。
基于概率的算法(比如RRT、PCD)和确定性算法(比如A*、Dijkstra)相比,不需要显式的表达,因而在高维问题中具有相当大的优势。可以大大节省计算量和空间需求。
- PCD虽然是基于ACD的,也是对各个cell进行不同粒度的分解,也是采用固定的形状,但是PCD中的cell是free还是occupied并不是确定的,而是概率的。PCD在一个cell中进行采样,如果所有的采样都是free,那么,这一个cell就被认为是 possibly free cell;如果所有的采样都是occupied,那么,这一个cell就被认为是possibly occupied cell;如果采样中,有free,有occupied,那么这一个cell被认为是known to be mixed,也就是需要被分解成前两个类型。
- 在一轮分解完成之后,采用一个图搜索算法去搜索一个连接init和goal的cell队列,称为通道channel。
- 搜索到一个通道之后,就会检查相应的path是不是安全,不安全就分解那一个不安全的possibly free cell;若是没有搜索到这样一个通道,那么说明当前的所有possibly free cell还没有连接成1个连通图,这肯定是因为有possibly occupied cell把这两个子连通图给隔开了,那么PCD就去这些possibly occupied cell采样并分解。
这一些步骤迭代下去,就能找到一个连接init和goal的path。下面具体的讲解一下PCD算法的细节。
1、表示
我们把一个cell k i k_i ki划分为以下三类之一
- possibly free cell,if 该cell内的采样都是free
- possibly occupied cell,if 该cell内的采样都是occupied
- known to be mixed,if 该cell内的采样有free,有occupied
包含了起始位置 q i n i t q_{init} qinit和 q g o a l q_{goal} qgoal的cell分别记为 K i n i t K_{init} Kinit和 K g o a l K_{goal} Kgoal。
在图搜索阶段,我们把每一个possibly free cell都看作是一个node,如果两个possibly free cell是相邻的(有公共边),那么我们就把这两个cell对应的node用edge给连接起来。最后我们就可以得到一些个连通图。
包含了 K i n i t K_{init} Kinit的连通图记为开始区域 R i n i t R_{init} Rinit。
包含了 K g o a l K_{goal} Kgoal的连通图记为目标区域 R g o a l R_{goal} Rgoal。
搜索阶段我们找到的那一系列连接 K i n i t K_{init} Kinit和 K g o a l K_{goal} Kgoal的cells称为一个通道channel。
2、算法步骤
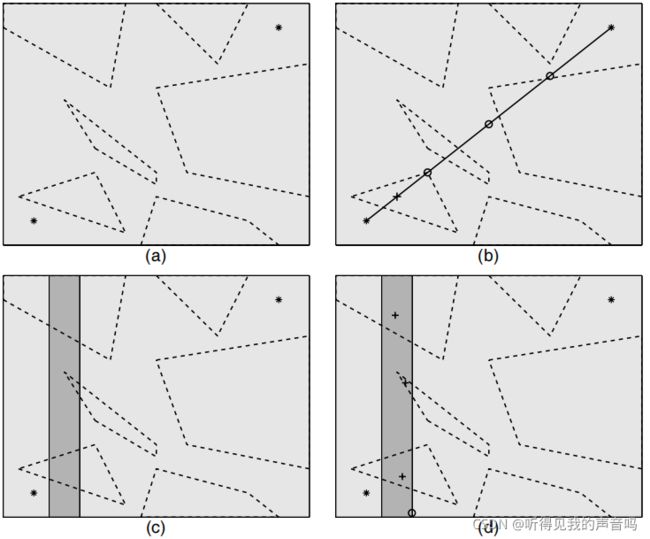
- 初始化:把整个地图看做一个cell,这个cell中有两个采样点 q i n i t q_{init} qinit和 q g o a l q_{goal} qgoal,很明显这个最初的cell是possibly free cell。并且 K i n i t = K g o a l = C w o r k K_{init}=K_{goal}=C_{work} Kinit=Kgoal=Cwork。
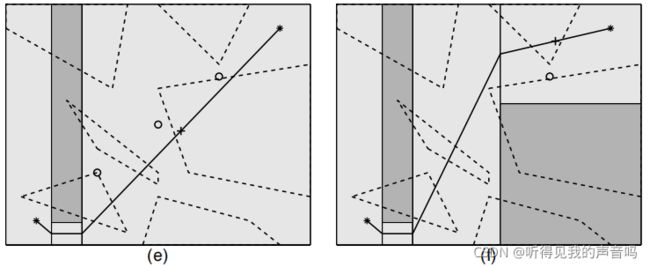
- 搜索阶段:返回一个连接了 K i n i t K_{init} Kinit和 K g o a l K_{goal} Kgoal的channel,在最开始也就是我们最初的这一个大cell。但是我们也有可能面临找不到channel的情况。这种时候转5。
- 检查阶段:反回了一个channel,且 q i n i t q_{init} qinit和 q g o a l q_{goal} qgoal在同一个cell内部,由于cell是凸的,所以我们可以把 q i n i t q_{init} qinit和 q g o a l q_{goal} qgoal用一段直线段连起来,并且检查这一个path是不是安全。如果安全,算法结束;如果不安全,转4。(不用说,大概率上都是不安全的)
- 转到这里,说明你在检查阶段碰到了不安全的路径。我们把检查出来不安全的那一个possibly free cell修改为known to be mixed,并且对其进行分解。分解完成后转2。
- 转到这里说明你在搜索阶段没有找到channel。想一想为什么。如果 K i n i t K_{init} Kinit和 K g o a l K_{goal} Kgoal在同一个连通图上,那怎么可能找不到channel呢?所以很明显, K i n i t K_{init} Kinit和 K g o a l K_{goal} Kgoal此时位于两个不同的图中,他们之间不是连通的。也就是有一些possibly occupied cell把 K i n i t K_{init} Kinit和 K g o a l K_{goal} Kgoal所属的两个连通图给隔离开了。因此我们现在的任务就是去那些possibly occupied cell中去采样,并把它们分解。分解完成后转2。
3、算法细节
3.1 cell形状
PCD把cell形状选为rectangloid,也就是正交的,二维空间就是长方形,三维空间就是长方体,高位空间就是***(爱叫啥就叫啥吧);总之,这些图形中的任意两邻边必定互相垂直。那么为什么这么选呢?
- 还能怎么选,高维空间呀,三维空间的几何就够难了,更高维空间肯定不是三维空间的生物能想明白的,几何形状肯定越简单越好啊。那么什么形状最简单?答:各边互相垂直的形状最简单。
- 这样的图行必定是凸的。为什么要求是凸的呀,因为在这样的图形中,任意两点的连线仍然位于图形内部。
但是,这样也有一些缺点,那就是有限数量的cell,没办法精确表示搜索空间。这很好理解吧。不说了。
3.2 图搜索
所有的possibly free cell 由node来表示,并组成一个图。每两个相邻的cell之间用一个edge来表示。edge的cost的确定可以选择不同的策略。PCD的作者用A*算法实现了图搜索。
3.3 局部路径规划LPP
一旦在搜索阶段找到了一条连接起点和终点的channel ψ = { K i n i t = K P 0 , K P 1 , . . . , K P n = K g o a l } ψ=\{K_{init}=K_{P_0},K_{P_1},...,K_{P_n}=K_{goal}\} ψ={Kinit=KP0,KP1,...,KPn=Kgoal}
LPP必须根据这一个channel规划一个相应的、经过possibly free cell的path出来。
其实想一想,即便是经过possibly free cell的path也不能保证是安全的吧。但是我们再想一想,经过possibly free cell的path和经过possibly occupied cell的path都不能保证是安全的,但是毕竟还是有差距的,经过possibly free cell的path安全的概率还是要大一些的吧。
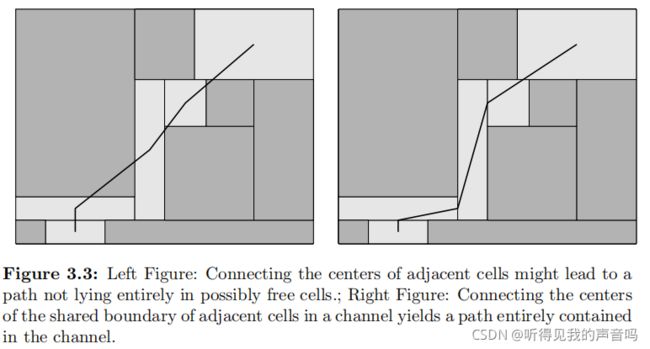
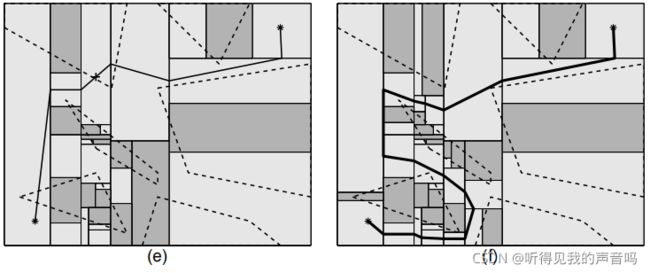
LPP有两种思路。一种是把channel中的cell的中心直接连起来,如下左图,这时候的path很可能要穿过possibly occupied cell。但是我们可以这么来想。
你这所有的cell不都是凸的吗?那么你这cell内部和边上的任意两点的连线都肯定位于这个cell内部。我们这么来看,channel中 K i − 1 K_{i-1} Ki−1和 K i K_i Ki是有一个公共边的(三维就是面,高维就是超平面),我们记为 S i − 1 S_{i-1} Si−1; K i K_i Ki和 K i + 1 K_{i+1} Ki+1也是有一个公共边的,我们记为 S i S_i Si。很明显 S i − 1 S_{i-1} Si−1和 S i S_i Si各自中心的连线一定位于possibly free cell K i K_i Ki内部,因而这一条path就全部位于possibly free cell内了。如下右图所示。
3.4 cell分解
一旦在possibly free cell中发现了碰撞点,或者在possibly occupied cell中发现了安全点,这一个cell就会被更改为known to be mixed,并且会被分解成possibly free cell和possibly occupied cell。我们尽量把碰撞点放在一个cell中,一般说来是分解成一个possibly occupied cell和 m i n ( 2 n , m ) min(2n,m) min(2n,m)个possibly free cell。
那么我们怎么分解呢?要知道cell都是rectangloid的,所以我们必须沿着各个坐标轴进行分解。所以我们的策略就是
- 找到相距最近的安全点比如 ( 0 , 0 , 0 ) (0,0,0) (0,0,0)和碰撞点比如 ( 1 , 2 , 4 ) (1,2,4) (1,2,4)
- 找到这两个点各个维度中相距最远的那一个维度,比如第三维 x 3 x_3 x3
- 将这两个采样点分别向该维度进行投影,并在两个投影点的中点处用一个垂直于该维度的超平面 x 3 = 2 x_3=2 x3=2分开。
3.5 概率采样
如果在图搜索阶段,我们没有找到任何一条channel,那么,我们需要对possibly occupied cell进行采样以扩展自由区域,进而方便我们找到一条channel。
3.6 算法结果
算法结果,详见下图
4、改进
4.1 概率采样
图搜索阶段,我们没有找到任何一个channel。这个时候我们不是说要采样possibly occupied cell吗?但是我们面临着两大问题:
- 一个很大的possibly occupied cell可能把一个狭窄的通道给堵住了(其实就是狭窄通道位于这个大cell内部)。如果我们每次只采样一个点,那我们能够找到这一个狭窄通道的概率就很低。相应的,我们就需要重复多次才能够找到这一个狭窄通道,这样算法的效率就很低。
- 我们真的需要对所有的possibly occupied cell都采样吗?让我们来思考一下,为什么我们没有找到一个可行的channel呢?是因为这个时候 K i n i t K_{init} Kinit和 K g o a l K_{goal} Kgoal位于两个不连通的子图当中,我们当然找不到channel。那是什么原因让这两个子图不连通了呢?很明显,是因为有一些possibly occupied cell卡在了两个子图之间对不对。所以我们要做的是对这些cell进行采样,而不是对所有的cell都采样。
针对第二个问题,改进后的PCD不对所有的possibly occupied cell采样,而是只对那些感兴趣的cell(Interesting Possibly Occupied Cell,IPOC)进行采样。那么什么是IPOC呢?
还记得在一开始我们定义的开始区域 R i n i t R_{init} Rinit和目标区域 R g o a l R_{goal} Rgoal吗?对所有的possibly occupied cell,我们把它们分层三类。
- 只和 R i n i t R_{init} Rinit相邻的possibly occupied cell
- 只和 R g o a l R_{goal} Rgoal相邻的possibly occupied cell
- 同时和 R i n i t R_{init} Rinit与 R g o a l R_{goal} Rgoal都相邻的possibly occupied cell。
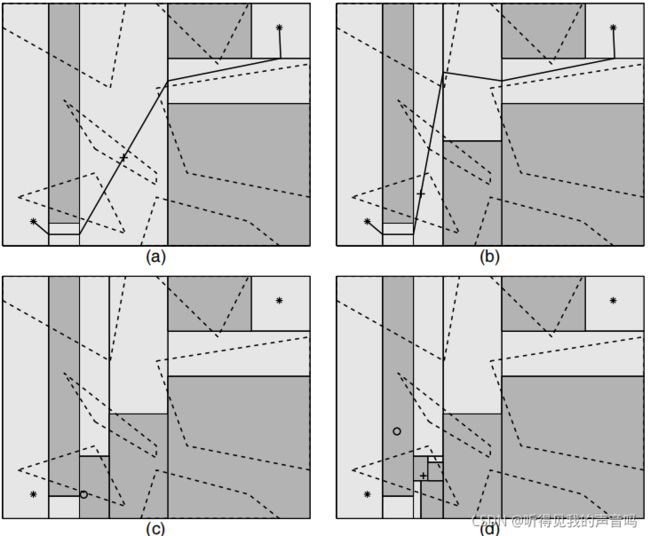
那么导致我们搜索不到channel的是哪一类呢?很明显是第三类。看下图
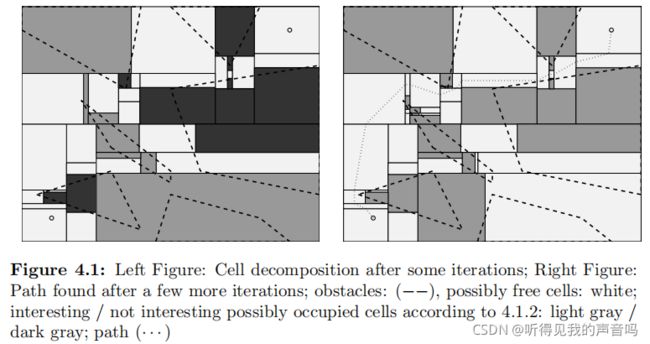
上图中,有三个颜色:白色、灰色、黑色。白色代表possibly free cell,灰色代表同时和 R i n i t R_{init} Rinit与 R g o a l R_{goal} Rgoal都相邻的possibly occupied cell。黑色代表只和 R i n i t R_{init} Rinit或者 R g o a l R_{goal} Rgoal两者之一相邻的possibly occupied cell。很明显,我们应该对灰色的possibly occupied cell进行采样。左图是采样并分解之前的,右图是采样并分解之后的。
4.2 图搜索策略
4.2.1 restart 还是 lazy
在搜索阶段,我们的目标是找到一条连接 K i n i t K_{init} Kinit和 K g o a l K_{goal} Kgoal的channel。那么我们用什么搜索策略呢?
对于图搜索来说,A*貌似是一个比较不错的方法,但是我们来想一下,假如在图搜索阶段我们没有找到channel,我们是不是要去采样IPOC并分解然后重新搜索呀,那么,我们前一次的搜索结果有没有用,是该丢弃然后重新搜索,还是说上一次的搜索结果可以接着用呢?
很明显,我们仅仅是对那些IPOC进行了采样和分解,那原先的那些possibly free cell变了吗?没有变。那原先的那一部分图结构变了吗?也没有变,仅仅是在原先的图基础上增加了一些新的节点,并且原先的那些节点到起点的最短距离也没变,所以上一轮的搜索结果仍然是可用的。那么这种时候,我们无需进行重新的搜索(restart A*),而是可以直接在上一次搜索的基础上,继续搜索,这称为Lazy A*。
再来想一下,我们找到了一个channel。但是我们在检查阶段发现这一个path是不安全的,因而我们对那一个不安全的possibly free cell进行了分解。所以,这一个cell对应的那个node被删除了,又出现了一些新的node。可以想见,这一个node,被删除之后,是不是意味着图的结构发生了改变。那跟这个node有关联的其他node到起点的最短距离是不是也会随之改变。如果我们还想用上一次的搜索结果,那我们就必须把由于这一个node被删除和新node加入所引起的影响向后传播。
很容易理解,这一个node离起点越近,他的影响就越大,要传播的工作量也就越大。那我们就想一下,传播是需要代价的,重新搜索也是需要代价的,这两个代价哪一个更大呀?我们是不是得好好考虑一下。我们可以这么干,我设置一个阈值 T t h r e d T_{thred} Tthred,如果传播的代价小于 T t h r e d T_{thred} Tthred,那我们就传播。如果传播的代价大于 T t h r e d T_{thred} Tthred,那我们就重新搜索(restart A**)。
4.2.2 optimal 还是 faster
解决了重新搜索还是lazy的问题,我们面临的另一个问题是:既然有检查阶段,就说明你在图搜索阶段找到的路径不能保证是安全的,那我在图搜索阶段还有必要非得找最优的那一个channel吗?毕竟连你可行不可行都不知道,我干嘛非要找最优的。我可不可以找一个次优的,但是我找的速度更快,可以吗?
这一个问题其实很好理解。但是对于解决办法,不同的人可能有不同的看法。就是在这里提出一种思路。
这是一种在工程领域中很常见的思想,称为——trade off。你可以翻译成平衡、取舍、交换、权衡。总之就是牺牲一些东西来换取一些东西。
5、PCD的问题
对狭窄通道表现不佳!
这似乎是基于概率的算法的通病。PRM、RRT也都具有这种问题。不过他们三者的具体情况还是有一些不一样。
对于PRM来说,它对狭窄通道表现不佳,是因为在采样过程中,采样到狭窄通道的概率比较低,因而比较难找到经过狭窄通道的路径。
对于RRT来说,它对狭窄通道表现不佳,是因为RRT很难生长进入狭窄通道,毕竟采样——生长,能够生长出来一个位于狭窄通道内的node的概率太低了。
而对于PCD来说,则属于第三种情况,要想用possibly free cell来表示个狭窄通道可能需要重复多轮才能完成,也就是需要好多个小的possibly free cell来表示一个狭窄通道,这导致运行时间过长,效率太低。
引用
[1] Lingelbach F . Path Planning using Probabilistic Cell Decomposition[J]. IEEE, 2004.