【雷达信号处理】脉冲多普勒PD及其MATLAB实现
这是目录
- 1 原理介绍
-
- 1.1 脉冲多普勒过程
- 1.2 信号模型
- 1.3 PD的实现
- 1.4 相参和非相参累积
- 2 实验内容
-
- 2.1 参数
- 3 MATLAB实现
- 参考文献
1 原理介绍
1.1 脉冲多普勒过程
我们用脉冲多普勒处理回波信号,目的是测量径向速度,提高信杂比和噪声比。
脉冲多普勒(pulse doppler, PD)处理是多普勒处理的第二大类。在MTI处理中,快时间/慢时间数据矩阵在慢时间维度中经过高通滤波,产生一个新的快时间/慢时间数据序列,其中杂波分量已被衰减。
下图说明了PD处理的原理。
 下图显示了计算每个慢时间行数据的离散傅里叶变换(DFT)的每个慢时间行的频谱分析。
下图显示了计算每个慢时间行数据的离散傅里叶变换(DFT)的每个慢时间行的频谱分析。
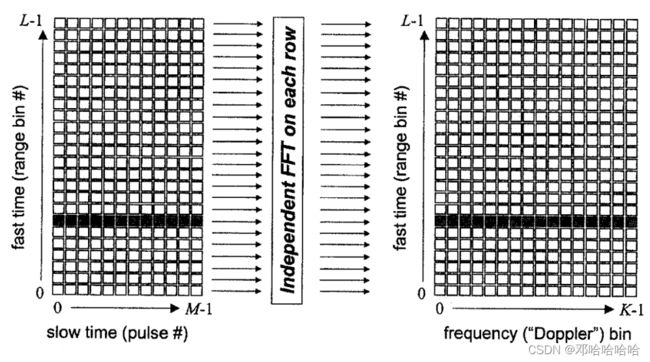 因此,PD处理的结果是一个数据矩阵,其维度分别表示快时间和多普勒频率。
因此,PD处理的结果是一个数据矩阵,其维度分别表示快时间和多普勒频率。
1.2 信号模型
- 发送信号——Chirp信号
S ( t n ) = g [ t n , T p ] e j π β t n 2 S(t_n)=g[t_n,T_p]e^{j \pi \beta {t_n}^2} S(tn)=g[tn,Tp]ejπβtn2
其中, T p T_p Tp为脉冲持续时间, β \beta β为调频斜率, G [ t , T p ] G[t,T_p] G[t,Tp]为门宽为 T p T_p Tp的门函数。 - 接受信号
s b ( m , t ) = g [ ( t − τ m ) / T p ] e j π β ( t − τ m ) 2 e − j 2 π f 0 τ m s_b(m,t)=g[(t-\tau_m)/T_p]e^{j \pi \beta (t-\tau_m)^2}e^{-j2\pi f_0\tau_m} sb(m,t)=g[(t−τm)/Tp]ejπβ(t−τm)2e−j2πf0τm
其中 f 0 f_0 f0为载波频率, τ m \tau_m τm为第 m m m个脉冲的时延 τ m = 2 ∗ ( R 0 − m T r v ) / c \tau_m=2*(R_0-mT_rv)/c τm=2∗(R0−mTrv)/c
1.3 PD的实现
我们可以通过两个步骤实现PD处理。第一步是脉冲压缩,第二步是慢时间FFT。
-
步骤1:沿距离方向的脉冲压缩
s 1 = A s i n c ( B ( t − τ 1 ) ) e − j 2 π f o τ 1 s_1=Asinc(B(t-\tau_1))e^{-j2\pi f_o\tau_1} s1=Asinc(B(t−τ1))e−j2πfoτ1 s 1 = A s i n c ( B ( t − τ 1 ) ) e − j 2 π f o τ 1 s_1=Asinc(B(t-\tau_1))e^{-j2\pi f_o\tau_1} s1=Asinc(B(t−τ1))e−j2πfoτ1 . . . . .... .... s N = A s i n c ( B ( t − τ N ) ) e − j 2 π f o τ N s_N=Asinc(B(t-\tau_N))e^{-j2\pi f_o\tau_N} sN=Asinc(B(t−τN))e−j2πfoτN -
步骤2:沿着慢时间做FFT
s p d = A s i n c ( B ( t − τ ) ) s i n c ( f − f d ) s_{pd}=Asinc(B(t-\tau))sinc(f-f_d) spd=Asinc(B(t−τ))sinc(f−fd)
1.4 相参和非相参累积
- 相参积累
- 没有信息丢失(振幅或相位)。
- 增益是n,其中n是脉冲数。
- 非相参积累
- 一些信息丢失(相位)
- 增益约为KaTeX parse error: Expected '}', got 'EOF' at end of input: n^{0.8]
- 在大多数情况下,相干积分比非相干积分更有效。
目标回波的波动会降低积分增益。
2 实验内容
2.1 参数

- PD 过程
步骤1:

步骤2:

2. 计算速度
根据上图2中最大值出现的位置,算得:
![]()
3 MATLAB实现
clear;
close all;
N = 4096;
fs = 100e6;
Ts = 1/fs;
R = 3000;
v = 60;
M = 64; % PRT(脉冲重复周期)
f0 = 10e9;
Tp = 10e-6;
PRT = 100e-6;
PRF = 1/PRT;
B = 10e6;
c = 3e8;
lambda = c/f0; % 波长
beta = B/Tp; % 调频斜率
SNR = [0 10 20]; % SNR dB
sigma2 = 1./(10.^(SNR/10)); % 噪声方差
noise_index = 1;
echo = zeros(M,N); % 回波
echo_noise = zeros(M,N); % 回波+噪声
echo_fft = zeros(M,N); % fft(回波)
echo_noise_fft = zeros(M,N); % fft 回波+噪声)
% 每个脉冲的延迟
tau = zeros(1,M);
for m = 1:M
tau(1,m) = 2*(R-m*PRT*v)/c;
end
n = 0:N-1;
t = n*Ts; % 时间范围
% 发送信号
x = rectpuls(t,Tp).*exp(1i*pi*beta*t.^2);
% 接收信号
y = zeros(M,N);
y_noise = zeros(M,N);
for m = 1:M
tm = tau(m);
y(m,:) = rectpuls((t-tm),Tp).*exp(1i*pi*beta*(t-tm).^2)*exp(-1i*2*pi*f0*tm);
y_noise(m,:) = y(m,:) + sqrt(sigma2(noise_index)/2)*(randn(1,N)+1j*randn(1,N));
% 脉冲压缩
X = fftshift(fft(x,N));
Y = fftshift(fft(y(m,:),N));
Y_noise = fftshift(fft(y_noise(m,:),N));
S = conj(X).*Y;
S_noise = conj(X).*Y_noise;
s = ifft(S);
s_noise = ifft(S_noise);
echo(m,:) = s;
echo_noise(m,:) = s_noise;
end
% coherent sum
% 慢时间FFT
for n = 1:N
echo_fft(:,n) = fftshift(fft(echo(:,n),M));
echo_noise_fft(:,n) = fftshift(fft(echo_noise(:,n),M));
end
%% 画图
r = t*c/2;
f = linspace(-1*PRF/2,PRF/2,M);
v = f*c/f0/2;
xaxis = 1:M;
yaxis = r;
figure(1);
% mesh(t,xaxis,abs(echo));
% xlabel('range(m)'),ylabel('time'),zlabel('amplitude');
imagesc(r,(1:M),abs(echo));
title('Pulse Compression');
xlabel('range(m)');
ylabel('slow time');
figure(2);
imagesc(r,v,abs(echo_fft));
% mesh(r,v,abs(echo_fft));
% xlabel('range(m)'),ylabel('doppler'),zlabel('amplitude');
% title('Range-Dopple Heat Map');
title('Pulse Doppler Processing');
xlabel('range(m)');
ylabel('velocity(m/s)');
%% 计算过程
fft_num_m = M;
f_m = (0:fft_num_m-1)*(PRF/fft_num_m);
[column,row]=find(abs(echo_fft)==max(max(abs(echo_fft)))); %row->矩阵列值 column->矩阵行值,所以转置了一下
C = [];
D = [];
% 距离
for a = row-3:row+3
amp = abs(echo_fft(column-1,a)); % 取幅度值
C(a) = amp*t(a)*c/2; %【sum(幅度(i)*距离(i))】
D(a) = amp;% 幅度值
end
d0 = sum(C)/sum(D);
%Velocity
E = [];
F = [];
for a_v = column - 3:column + 3%doppler相上 最大值的左右各3个点共7点
amp_v = abs(echo_fft(a_v,(row-1)));
E(a_v) = amp_v*f_m(a_v)*lambda/2;
F(a_v) = amp_v;
end
v0 = sum(E)/sum(F);
fprintf('无噪声时距离:%fm/s\n',d0);
fprintf('无噪声时速度:%fm/s\n',v0);
% 计算增益
% 1.相参积累
[~,index] = max(max(echo_noise));
P_noise = sum(sum(abs(echo_noise(index-10:index-1)).^2)+abs(echo_noise(index+1:index+10)).^2);
co_g = abs(max(max(echo_noise_fft)))^2/(P_noise);
fprintf('相参积累增益: %f dB\n',10*log10(co_g));
% 2.非相参积累
[~,index] = max(transpose(echo_noise));
P_n = sum(sum(abs(echo_noise(index-10:index-1)).^2)+abs(echo_noise(index+1:index+10)).^2);
nco_g = sum(abs(max(transpose(echo_noise_fft))).^2)/M/(P_n);
fprintf('非相参积累增益:%f dB\n',10*log10(nco_g));
参考文献
《雷达信号处理》